а
/г
tf
GO ОО Ю 00 СО
ы
Изобретение относится к машино - строению, в частности к устройствам для манипулирования и, соответственно, позиционирования деталей или инструментов.
Целью изобретения является обеспечение точного позиционирования промежуточной шариковой опоры в любом конечном положении за счет усиления на- правляющих колонн в направлении главной нагрузки и смещения в двух различных плоскостях пространства.
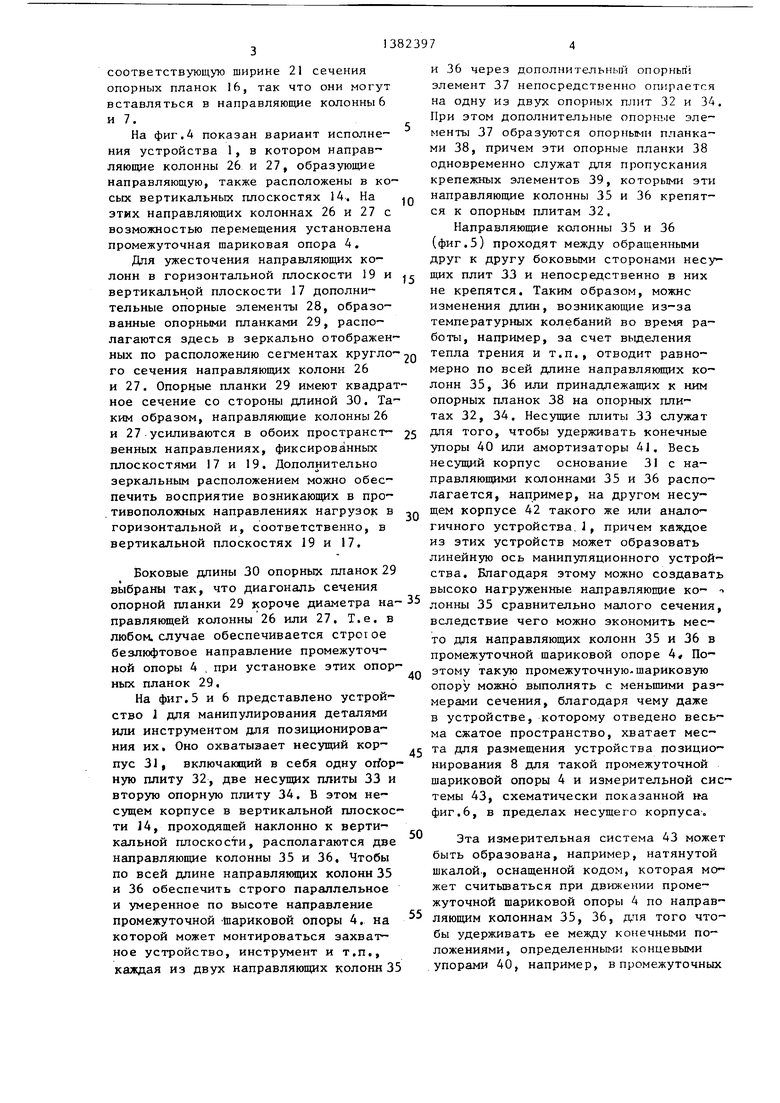
На фиг.1 изображено устройство для манипулирования или позициониро- вания деталями, общий вид; на фиг,2 - вид А на фиг,1 с частичным разрезом Б-Б на фиг.1; на фйг,3 - направляющая колонна с закрепленным на ней до- полш1тельным опорным элементом, вид сбоку; на фиг,4 - вариант исполнения устройства для манипулирования деталями, вид А на фиг,1; на фиг,5 - вариант исполнения устройства для манипулирования деталями, вид сбоку; на фиг.6 вид В на фиг.5; на фиг.7 - вариант исполнения устройства дпя манипулирования деталями, частичный разрез Г-Г на фиг.5; на фиг,8 -часть устройства,вид сбоку, разред Д-Д на фиг.7,
В устройстве 1 для манипулирования деталями 2 или их позиционирования захватное устройство 3 закрепляется на промежуточной шариковой опоре А, которая установлена с возможностью перемещения вдоль направляющей 5, образованной направляющими колоннами 6 и 7, при помощи устройства 8 позиционирования, например цилиндропорш- невого устройства силового цилиндра 9. Направляющие колонны 6 и 7 своими концевыми участками установлены Б опорные плиты 10 и 11, образующими вместе с опорной плитой 12 несушд{й корпус (основание) 13. Обе направляющие колонны 6 и 7 как в горизонтальном, так и в вертикальном направлениях смещены одна относительно другой, и, следовательно, распола гаются в плоскости 14, проходящей наклонно к горизонтали,
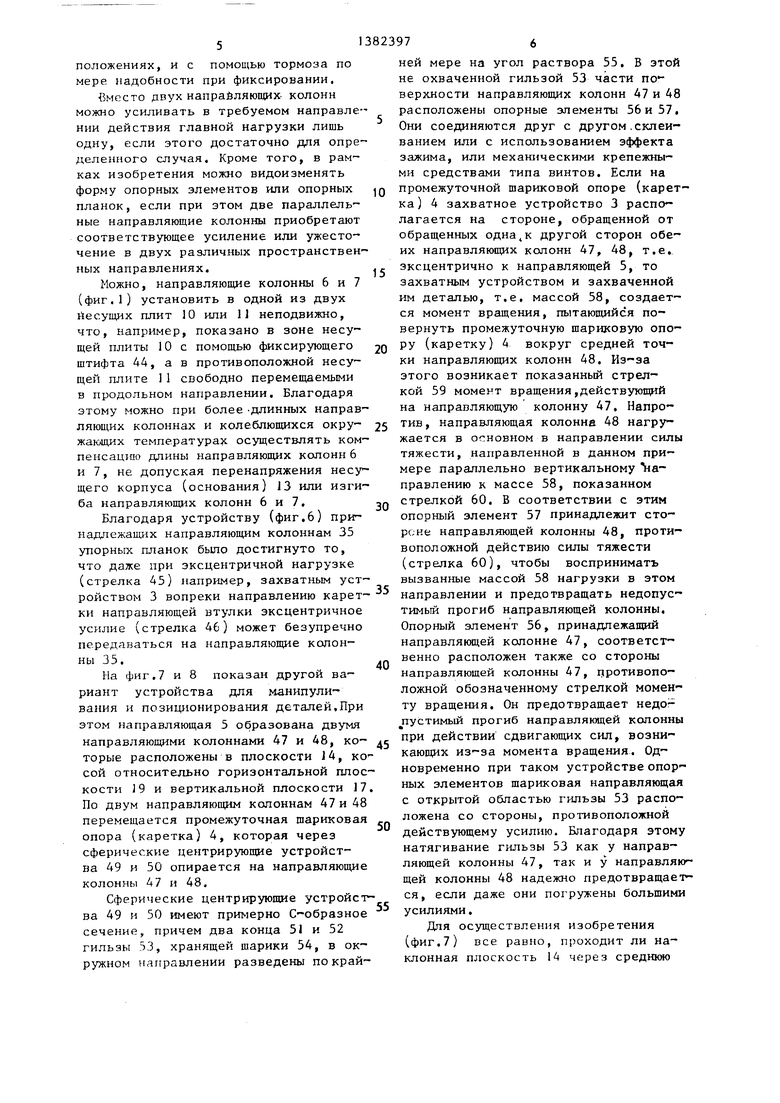
Нижняя направляющая колонны 6 имеет дополнительный опорньш элемент 15 обра301 анный опорной планкой 16 пря- моуголыюго сечения, центральной относите, гьно вертикальной плоскости 17 и про:-;г1, через центр направляющей к(1. кшиы 6, для подпирания и усиления при нагрузках в направлении вертикальной плоскости 17,
Верхней направляющей колонне 7 также принадлежит дополнительный опорный элемент 18, образованньй опорной планкой 16 прямоугольного сечения, который располагается по середи не горизонтальной плоскости 19, проходящей через центр направляющей колонны 7,
Высота сечения 20 параллельна соответственно го1 изонтапьной или вертикальной плоскостям 19 и 17 соответственно и больше ширины 21 сечения опорных планок 16, Ширина 21 сечения опорных планок 16 меньше диамет ра 22 направляющих колонн 6 и 7..
Благодаря этому направляющие колонны 6 и 7 усиливаются в горизонтальной и вертикальной плоскостях 19 и 17, а направляющая 5 становится жестче в обоих этих направлениях. Это обеспечивает строго параллельный ход промежуточной шариковой опоры 4, так как прогиб направляющих колонн даже при приложении больших усилий в. зоне захватного устройства 3 в направлении обеих плоскостей J7 и 19 уменьшается, Дпя достижения повьшения жесткости в направлении горизонтальной и вертикальной плоскостей 19 и 17, отвечающего характеру изгиба направляющих колонн 6 и 7,можно (как показано в схематическом изображении направляющих колонн 6 на фиг.1) выбирать высоту сечения 20 и момент сопротив- ления направляющей колонны 6,7 в соответствии ожидаемому ходу линии изгиба. Благодаря этому можно подгонять фактический момент сбпротивления в различных участках длины направляющих колонн 6 или 7 к возникающим в этих зонах нагрузкам, в частности к нагрузкам от изгибающего момента.
На фиг.З при помощи сечения направляющей колонны 23 показано, что соединение опорной планки 16 с направляющей колонной 23 может осуществляться следующим образом. Направляющая колонна 23 имеет сечение в виде участка круга и на плоской стороне 24 направляющей колонны 23 опорная планка 16 винтами 25 соединена с направляющей колонной 23,
Но можно также (фиг.1 и 2) направляющие колонны 6 и 7 выполнять с пазом, проходящим в их продольном направлении, имеющем ширину, примерно
10
соответствующую ширине 21 сечения опорных планок 16, так что они могут вставляться в направляющие колонны 6 и 7.
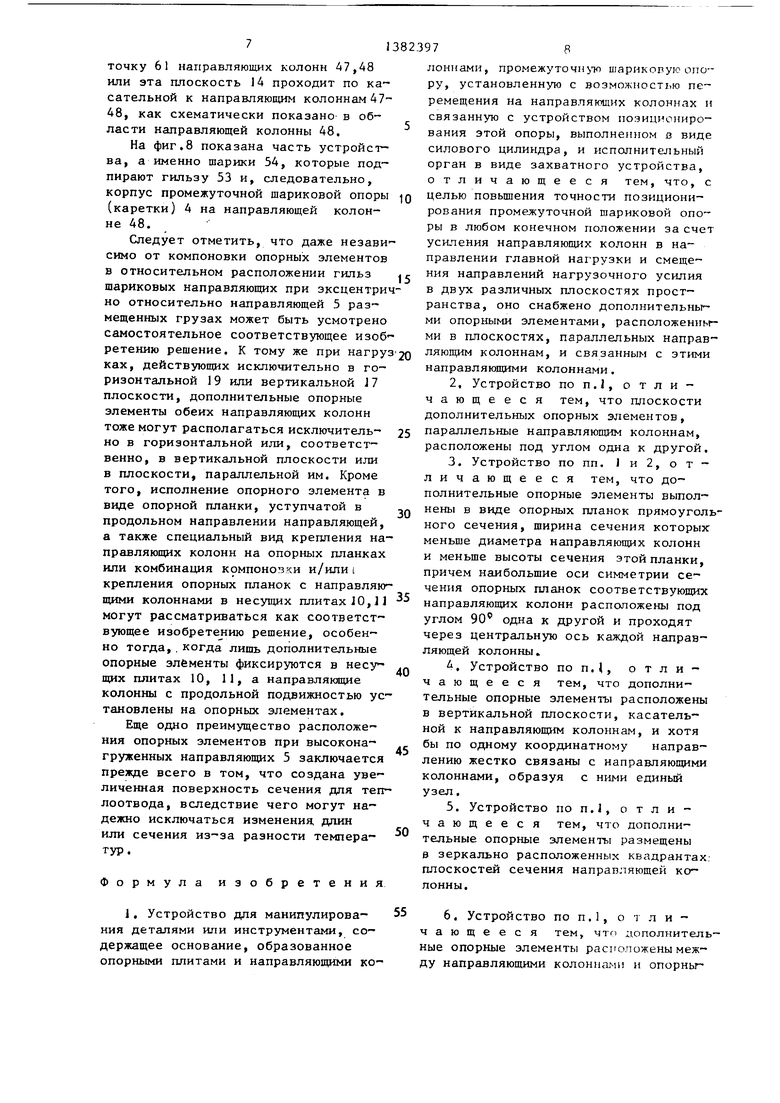
На фиг.4 показан вариант исполнения устройства 1, в котором направляющие колонны 26 и 27, образующие направляющую, также расположены в косых вертикальных плоскостях 14, На этих направляющих колоннах 26 и 27 с возможностью перемещения установлена промежуточная шариковая опора 4,
Для ужесточения направляющих колонн в горизонтальной плоскости 19 и вертикальной плоскости 17 дополнительные опорные элементы 28, образованные опорными планками 29, располагаются здесь в зеркально отображенных по расположению сегментах кругло- Q го сечения направляющих колонн 26 и 27. Опорные планки 29 имеют квадратное сечение со стороны дпиной 30. Таким образом, направляющие колонны 26 и 27 усиливаются в обоих пространственных направлениях, фиксированных плоскостями 17 и 19. Дополнительно зеркальным расположением можно обеспечить восприятие возникающих в противоположных направлениях нагрузок в горизонтальной и, соответственно, в вертикальной плоскостях 19 и 17.
Боковые длины 30 опорных планок 29 выбраны так, что диагональ сечения
25
30
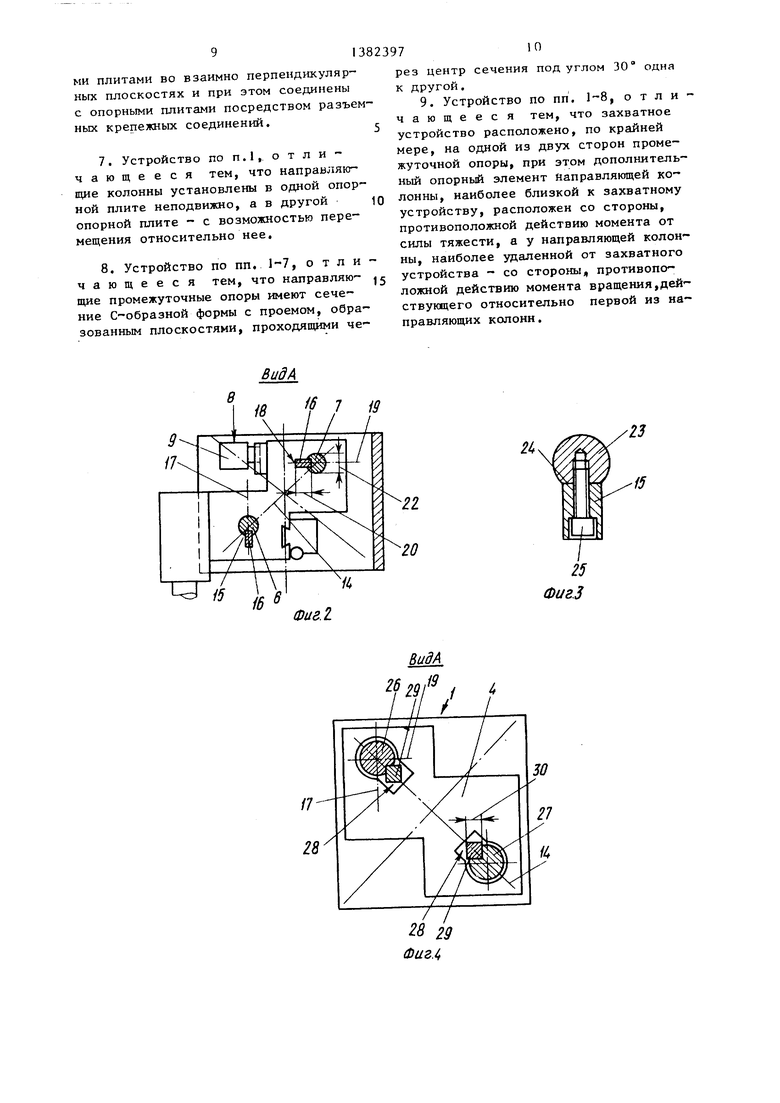
и 36 через дополнительный опорньп элемент 37 непосредственно опирается на одну из двух опорных плит 32 и 34 При этом дополнительные опорные элементы 37 образуются опорными планками 38, причем эти опорные планки 38 одновременно служат для пропускания крепежных элементов 39, которыми эти направляющие колонны 35 и 36 крепятся к опорным плитам 32.
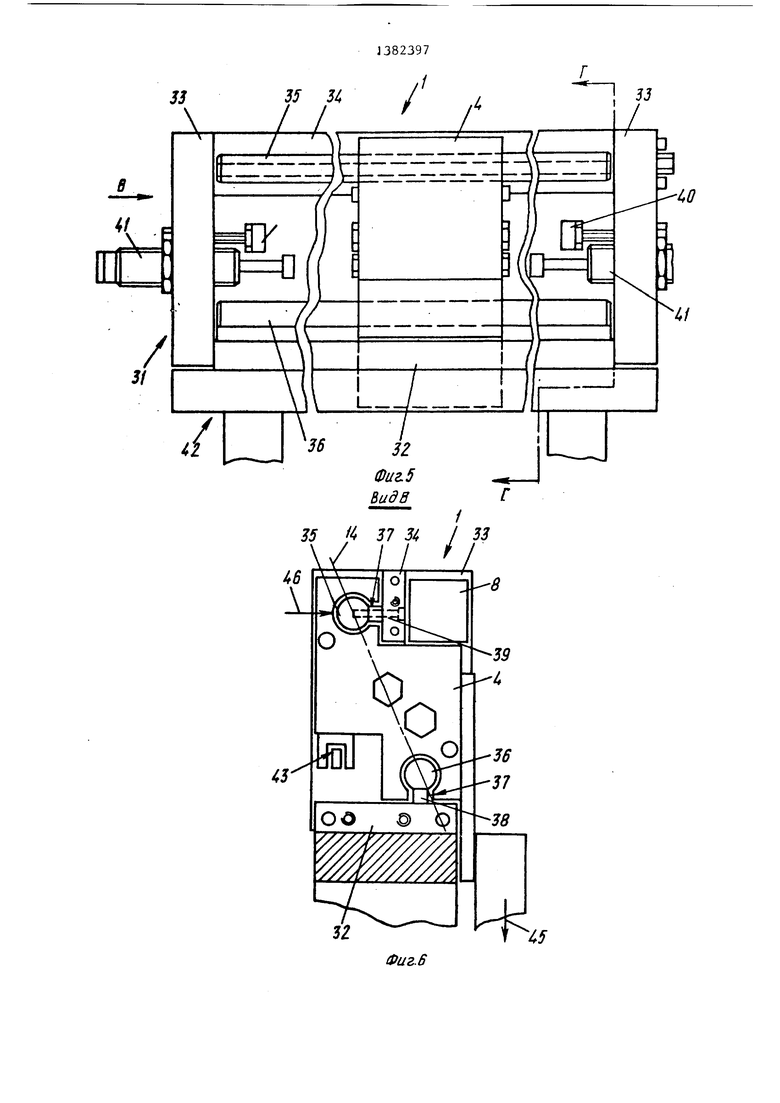
Направляющие колонны 35 и 36 (фиг.5) проходят между обращенными друг к другу боковыми сторонами несу щих плит 33 и непосредственно в них не крепятся. Таким образом, можнс изменения дпин, возникающие из-за температурных колебаний во время работы, например, за счет выделения тепла трения и т.п., отводит равномерно по всей длине направляющих колонн 35, 36 или принадлежащих к ним опорных планок 38 на опорных плитах 32, 34. Несущие плиты 33 служат для того, чтобы удерживать конечные упоры 40 или амортизаторы 41, Весь несущий корпус основание 31 с направляющими колоннами 35 и 36 располагается, например, на другом несущем корпусе 42 такого же или аналогичного устройства.1, причем каждое из этих устройств может образовать линейную ось манипуляционного устрой ства. Благодаря этому можно создават высоко нагруженные направляющие коопорной планки 29 короче диаметра на- 35 онны 35 сравнительно малого сечения
правляющей колонны 26 или 27. Т.е. в любом, случае обеспечивается строгое безлюфтовое направление промежуточной опоры 4 . при установке этих опорных планок 29,
На фиг.5 и 6 представлено устройство i для манипулирования деталями или инструментом для позиционирования их. Оно охватывает несущий корпус 31, включающий в себя одну orfop- ную плиту 32, две несущих плиты 33 и вторую опорную плиту 34. В этом несущем корпусе в вертикальной плоскости 14, проходящей наклонно к вертикальной плоскости, располагаются две направляющие колонны 35 и 36, Чтобы по всей длине направляющих колонн 35 и 36 обеспечить строго параллельное и умеренное по высоте направление промежуточной йариковой опоры 4. на которой может монтироваться захватное устройство, инструмент и т.п., каждая из двух направляющих колонн 35
40
45
вследствие чего можно экономить место для направляющих колонн 35 и 36 в промежуточной шариковой опоре 4« Поэтому такую промежуточную.шариковую опору можно выполнять с меньшими раз мерами сечения, благодаря чему даже в устройстве, которому отведено весь ма сжатое пространство, хватает места для размещения устройства позицио нирования 8 для такой промежуточной шариковой опоры 4 и измерительной си темы 43, схематически показанной на фиг.6, в пределах несущего корпуса-.
50
Эта измерительная система 43 може быть образована, например, натянутой шкалой., оснащенной кодом, которая мо жет считьшаться при движении промежуточной шариковой опоры 4 по направ 55 ляющим колоннам 35, 36, для того что бы удерживать ее между конечными положениями, определенными концевыми упорами 40, например, в промежуточных
0
Q 5
0
и 36 через дополнительный опорньп элемент 37 непосредственно опирается на одну из двух опорных плит 32 и 34. При этом дополнительные опорные элементы 37 образуются опорными планками 38, причем эти опорные планки 38 одновременно служат для пропускания крепежных элементов 39, которыми эти направляющие колонны 35 и 36 крепятся к опорным плитам 32.
Направляющие колонны 35 и 36 (фиг.5) проходят между обращенными друг к другу боковыми сторонами несущих плит 33 и непосредственно в них не крепятся. Таким образом, можнс изменения дпин, возникающие из-за температурных колебаний во время работы, например, за счет выделения тепла трения и т.п., отводит равномерно по всей длине направляющих колонн 35, 36 или принадлежащих к ним опорных планок 38 на опорных плитах 32, 34. Несущие плиты 33 служат для того, чтобы удерживать конечные упоры 40 или амортизаторы 41, Весь несущий корпус основание 31 с направляющими колоннами 35 и 36 располагается, например, на другом несущем корпусе 42 такого же или аналогичного устройства.1, причем каждое из этих устройств может образовать линейную ось манипуляционного устройства. Благодаря этому можно создавать высоко нагруженные направляющие ко5 онны 35 сравнительно малого сечения
0
5
вследствие чего можно экономить место для направляющих колонн 35 и 36 в промежуточной шариковой опоре 4« Поэтому такую промежуточную.шариковую опору можно выполнять с меньшими размерами сечения, благодаря чему даже в устройстве, которому отведено весьма сжатое пространство, хватает места для размещения устройства позицио нирования 8 для такой промежуточной шариковой опоры 4 и измерительной системы 43, схематически показанной на фиг.6, в пределах несущего корпуса-.
Эта измерительная система 43 может быть образована, например, натянутой шкалой., оснащенной кодом, которая может считьшаться при движении промежуточной шариковой опоры 4 по направ- ляющим колоннам 35, 36, для того чтобы удерживать ее между конечными положениями, определенными концевыми упорами 40, например, в промежуточных
положениях, и с помощью тормоза по мере надобности при фиксировании.
Смссто двух напрайляющих- колонн можно усиливать в требуемом направлении действия главной нагрузки лишь одну, если этого достаточно для определенного случая. Кроме того, в рамках изобретения можно видоизменять форму опорных элементов или опорных планок, если при этом две параллельные направляющие колонны приобретают соответствующее усиление или ужесточение в двух различных пространственных направлениях.
Можно, направляющие колонны 6 и 7 (фиг.) установить в одной из двух йесущих плит 10 или 11 неподвижно, что, например, показано в зоне несущей плиты 10 с помощью фиксирующего штифта 44, а в противоположной несущей плите 11 свободно перемещаемыми в продольном направлении. Благодаря этому можно при более -длинных направляющих колоннах и колеблющихся окружающих температурах осуществлять ком- пенсацшо длины направляющих колонн 6 и 7, не допуская перенапряжения несу щего корпуса (основания) 13 или изгиба направляющих колонн 6 и 7.
Благодаря устройству (фиг.6) принадлежащих направляющим колоннам 35 упорных планок было достигнуто то, что даже при эксцентричной нагрузке (стрелка 45) например, захватным устройством 3 вопреки направлению карет ки направляющей втулки эксцентричное усилие (стрелка 46) может безупречно передаваться на направляющие колонны 35.
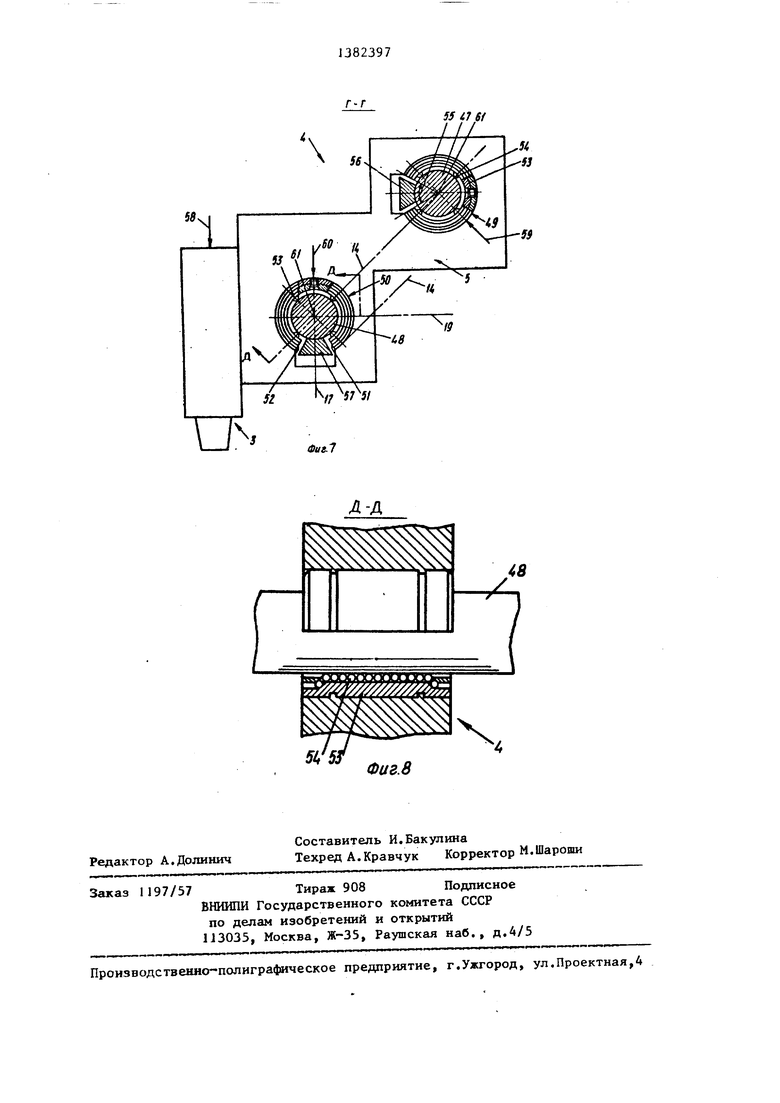
На фиг.7 и 8 показан другой вариант устройства для манипули ваиия и позиционирования деталей.При этом направляющая 5 образована двумя направляющими колоннами 47 и 48, которые расположены в плоскости 14, ко сой относительно горизонтальной плоскости 19 и вертикальной плоскости 17 По двум направляющим колоннам 47 и 48 перемещается промежуточная шариковая опора (каретка) 4, которая через сферические центрирующие устройства 49 и 50 опирается на направляющие колонны 47 и 48,
Сферические центрирующие устройст ва 49 и 50 имеют примерно Сообразное сечение, причем два конца 51 и 52 гильзы 33, храняще щарики 54, в окружном направлении разведены по край
.
10
15
20
25
30
35
40
45
50
55
ней мере на угол раствора 55. В этой не охваченной гильзой 53 части верхности направляющих колонн 47 и 48 расположены опорные элементы 56 и 57, Они соединяются друг с другом.склеиванием или с использованием эффекта зажима, или механическими крепежными средствами типа винтов. Если на промежуточной щариковой опоре (каретка) 4 захватное устройство 3 распо- лагается на стороне, обращенной от обращенных другой сторон обеих направляющих колонн 47, 48, т.е. эксцентрично к направляющей 5, то захватным устройством и захваченной им деталью, т.е. массой 58, создается момент вращения, пытающийся повернуть промежуточную щариковую опору (каретку) 4 вокруг средней точки направляющих колонн 48. этого возникает показанный стрел кой 59 момент вращения,действующий на направляющую колонну 47. Напротив, направляющая колонна 48 нагружается в основном в направлении силы тяжести, направленной в данном примере параллельно вертикальному Направлению к массе 58, показанном стрелкой 60. В соответствии с этим опорный элемент 57 принадлежит стороне направляющей колонны 48, противоположной действию силы тяжести (стрелка 60), чтобы воспринимать вызванные массой 58 нагрузки в этом направлении и предотвращать недопустимый прогиб направляющей колонны. Опорный элемент 56, принадлежащий направляющей колонне 47, соответственно расположен также со стороны направляющей колонны 47, г(ротивопо- ложной обозначенному стрелкой моменту вращения. Он предотвращает недо- jiycTHMbui прогиб направляющей колонны при действии сдвигающих сил, возникающих из-за момента вращения. Одновременно при таком устройстве опорных элементов шариковая направляющая с открытой областью гильзы 53 расположена со стороны, противоположной действующему усилию. Благодаря этому натягивание гильзы 53 как у направляющей колонны 47, так и у направляющей колонны 48 надежно предотвращается, если даже они погружены большими усилиями.
Для осуществления изобретения (фиг.7) все равно, проходит ли наклонная плоскость 14 через среднюю
лоинами, промежу точи утл шариковую опору, установленную с возможностью перемещения на направляющих колоннах и связанную с устройством позиционирования этой опоры, выполненном в виде силового цилиндра, и исполнительный орган в виде захватного устройства, отличающееся тем, что, с целью повьшения точности позиционирования проме-жуточной П1ариковой опоры в любом конечном положении за счет усиления направляющих колонн в направлении главной нагрузки и смещения направлений нагрузочного усилия в двух различных плоскостях пространства, оно снабжено дополнительными опорными элементами, расположенными в плоскостях, параллельных HanpaB10
точку 61 направляющих колонн 47,А8 или эта плоскость А проходит по касательной к направляющим колоннам 47- 48, как схематически показано- в области направляющей колонны 48.
На фиг,8 показана часть устройства, а именно шарики 54, которые подпирают гильзу 53 и, следовательно, корпус промежуточной щариковой опоры (каретки) 4 на направляющей колонне 48.
Следует отметить, что даже незави - симо от компоновки опорных элементов в относительном расположении гильз jr шариковых направляющих при эксцентрично относительно направляющей 5 размещенных грузах может быть усмотрено самостоятельное соответствующее изоб - ретению решение. К тому же при нагруз 20 ляющим колоннам, и связанным с этими
25
30
как, действующих исключительно в горизонтальной 19 или вертикальной J7 плоскости, дополнительные опорные элементы обеих направляющих колонн тоже могут располагаться исключительно в горизонтальной или, соответственно, в вертикальной плоскости или в плоскости, параллельной им. Кроме того, исполнение опорного элемента в виде опорной планки, уступчатой в продольном направлении направляющей, а также специальный вид крепления направляющих колонн на опорных планках или комбинация крмпонозхи и/или i крепления опорных планок с направляющими колоннами в несущих плитахJО, могут рассматриваться как соответствующее изобретению решение, особенно тогда,.когда лишь дополнительные опорные элементы фиксируются в несу щих плитах 10, 11, а направляющие колонны с продольной подвижностью установлены на опорных элементах,
Еще одно преимущество расположения опорных элементов при высоконагруженных направляющих 5 заключается прежде всего в том, что создана уве-- личенная поверхность сечения для теп- лоотвода, вследствие чего могут надежно исключаться изменения, длин или сечения из-за разности темпера- тур.
Формула изобретения
1, Устройство для манипулирова- 55 ния деталями или инструментами, содержащее основание, образованное опорными плитами и направляющими ко40
45
направляющими колоннами.
2.Устройство по п.1, о т л и - чающееся тем, что плоскости дополнительных опорных элементов, параллельные направляющим колоннам, расположены под углом одна к другой.
3.Устройство по пп. J и 2, о т - личающееся тем, что дополнительные опорные элементы выполнены в виде опорных планок прямоуголь ного сечения, ширина сечения которых меньше диаметра нaпpaвляюшJ x колонн
и меньше высоты сечения этой планки, причем наибольшие оси симметрии сечения опорных планок соответствующих направляющих колонн расположены под углом 90 одна к другой и проходят через центральную ось каждой направляющей колонны.,
4.Устройство по П.1, отличающееся тем, что дополнительные опорные элементы расположены в вертикальной плоскости, касательной к направляющим колоннам, и хотя бы по одному координатному направлению жестко связаны с направляющими колоннами, образуя с ними единый узел.
5.Устройство по n.J, отличающееся тем, что дополнительные опорные элементы размещены
в зеркально расположенных квадрантах. плоскостей сечения направляющей колонны.
6.Устройство по п., о т л и - чающееся тем, что дополнитель ные опорные элементы расположены между направляющими колоннами и опорньг82397S
лоинами, промежу точи утл шариковую опору, установленную с возможностью перемещения на направляющих колоннах и связанную с устройством позиционирования этой опоры, выполненном в виде силового цилиндра, и исполнительный орган в виде захватного устройства, отличающееся тем, что, с целью повьшения точности позиционирования проме-жуточной П1ариковой опоры в любом конечном положении за счет усиления направляющих колонн в направлении главной нагрузки и смещения направлений нагрузочного усилия в двух различных плоскостях пространства, оно снабжено дополнительными опорными элементами, расположенными в плоскостях, параллельных HanpaB10
jr 20 ляющим колоннам, и связанным с этими
5
0
5
0
5
направляющими колоннами.
2.Устройство по п.1, о т л и - чающееся тем, что плоскости дополнительных опорных элементов, параллельные направляющим колоннам, расположены под углом одна к другой.
3.Устройство по пп. J и 2, о т - личающееся тем, что дополнительные опорные элементы выполнены в виде опорных планок прямоугольного сечения, ширина сечения которых меньше диаметра нaпpaвляюшJ x колонн
и меньше высоты сечения этой планки, причем наибольшие оси симметрии сечения опорных планок соответствующих направляющих колонн расположены под углом 90 одна к другой и проходят через центральную ось каждой направляющей колонны.,
4.Устройство по П.1, отличающееся тем, что дополнительные опорные элементы расположены в вертикальной плоскости, касательной к направляющим колоннам, и хотя бы по одному координатному направлению жестко связаны с направляющими колоннами, образуя с ними единый узел.
5.Устройство по n.J, отличающееся тем, что дополнительные опорные элементы размещены
в зеркально расположенных квадрантах. плоскостей сечения направляющей колонны.
6.Устройство по п., о т л и - чающееся тем, что дополнительные опорные элементы расположены между направляющими колоннами и опорньгми плитами во взаимно перпеидикуляр- Hbtx плоскостях и при этом соединены с опорными плитами посредством разъемных крепежных соединений.
7.Устройство по п.1, о т л и - чающееся тем, что направляющие колонны установлены в одной опорной плите неподвижно, а в другой опорной плите - с возможностью перемещения относительно нее,
8.Устройство по пп, , отличающееся тем, что направляю- щие промежуточные опоры имеют сечение С-образной формы с проемом, образованным плоскостями, проходящими через центр сечения под углом 30° одна к другой,
9, Устройство по пп, 1-8, о т л и чающееся тем, что захватное устройство расположено, по крайней мере, на одной из двух сторон промежуточной опоры, при этом дополнительный опорный элемент Направляющей колонны, наиболее близкой к захватному устройству, расположен со стороны, противоположной действию момента от силы тяжести, а у направляющей колонны, наиболее удаленной от захватного устройства - со стороны, противоположной действию момента вращения,действующего относительно первой из направляющих колонн,
Изобретение относится к машиностроению, в частности к устройствам для манипулирования и соответственно позиционирования деталей или инстру ментов. Целью изобретеиия является повышение точности позиционирования промедсуточной шариковой опоры в любом конечном положении за счет усиления направляюпщх колонн в направлении главной нагрузки и смещения в двух различных плоскостях пространства. Для зтого устройство для манипулирования деталями имеет направляющую 5, образованную направляющими колоннами. На ней с возможностью перемещения установлена промежуточная шариковая опора 4, связгшная с устройством позиционирования 8. Направляющие колонны 6 и 7 имеют соответственно дополнительные опорные элементы J 6 и 18, расположенные параллельно им. Дополнительные опорные элементы располагаются в плоскостях 17 и 19, рас- ,положенных параллельно направляющим колоннам. 6 и 7 и под углом друг к другу, и подпирают направляющие колонны 6 и 7. 8 з.п. ф-лы. 8 ил. i О)
Фиг.
/7
28
/
20
/ /
ZQ
21
/
/4
/ /
5 29 Фи.г4
33
в
м
4/
5 54//
/ / /
Г
//ч ЯН
/
5/
363Z
Фт5 BudsГ
/
35 4 37 34 I гз
I
ОО , © 9
Г
I/
33
1
4
.-JJ
57 -38
4
Фиг. 6
58
НигЛ
5Ц
LL/
X
Фиг.8
| Манипулятор | 1979 |
|
SU781049A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
