Изобретение относится к области строительства, в частности к работам по ремонту, восстановлению или реконструкции зданий и сооружений, и может быть использовано для их перемещения, а также для передвижки любых других конструкций по горизонтальным, вертикальным и наклонным направляющим.
Целью изобретения является упрощение эксплуатации и повьппение производительности.
На фиг,1 изображено устройство, вид сверху: на фиг,2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - захват, вид сверху; на фиг.З - разрез В-В на фиг.А; I на фиг.6 - разрез Г-Г на фиг.4; на фиг.7, 8, 9 - схема работы захватов в различных положениях (I, II, III).
Устройство для передвижки содержит прикрепленную к передвигаемому зданию или сооружению 1 переднюю упорную балку 2 с приводным механизмом в виде силового цилиндра 3, шток 4 которого соединен с задней упорной балкой 5, установленной на направляющих 6.
Упорная балка 5 имеет площадку для пригруза 7 и соединена тягами 8 с треугольными рычагами 9, шарнирно смонтированными на осях 10, которыми снабжен корпус 11 с размещенными внутри него клиньями 12 для захвата направляющих 6. Треугольный рычаг 9 выполнен с выступом в одной из его вершин, входящим в паз клиньев 12. На направляющих 6 установлены также подвижные упоры 13, с которыми тягами 14 соединены рычаги 9.
Устройство работаея следзпощим образом.
Передняя упорная балка 2 крепится к передвигаемо конструкции 1, на направляющие 6 устанавливается задняя упорная балка 5 и корпусы 11 с клиньями 12. Упорные балки 2 и 5 соединяются между собой силовым цилиндром 3 со штоком 4.
В исходном положении цилиндром 3 задняя упорная балка 5с захватами перемещается к передвигаемому сооружению, упоры 13 упираются в переднюю опорную балку 2 и под действием силы Р с помощью тяг 14 поворачивают рычаг 9 (фиг.7). Треугольные рычаги при вращении упираются в тягу 8 и сдвигают захват вперед, при зтом
между задней упорной балкой и захватом образуется зазор Л, одновременно действуя на клинья 12, передвигают
их и под действием момента М
р . в
заклинивают направляющие
6 в корпусе 11 захвата.
При рабочем ходе цилиндр 3 действует на заднюю упорную балку 5, которая с помощью тяг 8 под действием сил Р стремится повернуть рычаги 9 и сдвинуть клинья 12.под действием момента М 1 вперед, заклинивая направлякядую 6 в корпусе 11 захвата (фиг.8), который остается неподвижным, а передвигаемое сооружение 1 перемещается вперед на расстояние, равное ходу штока 4 цилиндра 3
При холостом ходе цилиндр 3 сдвигает вперед заднюю упорную балку 5, которая под действием силы Р с помощью тяг 8 поворачивает рычаг 9 в направлении, обратном рабочему (фиг.9), под действием момента М
р в
з-L сдвигает клинья 12 в обрат2 I
ном направлении, освобождая направляющие 6, после чего упорная балка 5 вместе с захватами и шарнирным механизмом перемещается в направлении передвигаемой конструкции до упора (фиг.7). Далее процесс повторяется.
Предложенное вьшолнение устройства упрощает его эксплуатацию и повышает производительность.
Формула изобретения
Устройство для передвижки зданий и сооружений, содержащее направляющие, переднюю и заднюю упорные балки, соединенные силовым цилиндром, и установленные на задней упорной балке симметрично силовому цилиндру захваты для взаимодействия с направляющими, отличающееся тем, что, с целью упрощения эксплуатации и повышения производительности, каждый захват выполнен в виде заключенных в корпус клиньев, каждый из которых имеет паз, а корпус захвата снабжен парой шарнирных осей и установленным на каждой из них треугольным рычагом с выступом в одной из вершин, входящим в паз соответствующего клина, при этом устройство снабжено подвижно смонтированными на направляклцих упорами, а две другие рычага 312734764 вершины каждого треугольного ответственно с задней упорной балкой соединены шарнирно тягами со- и с упором направляющей.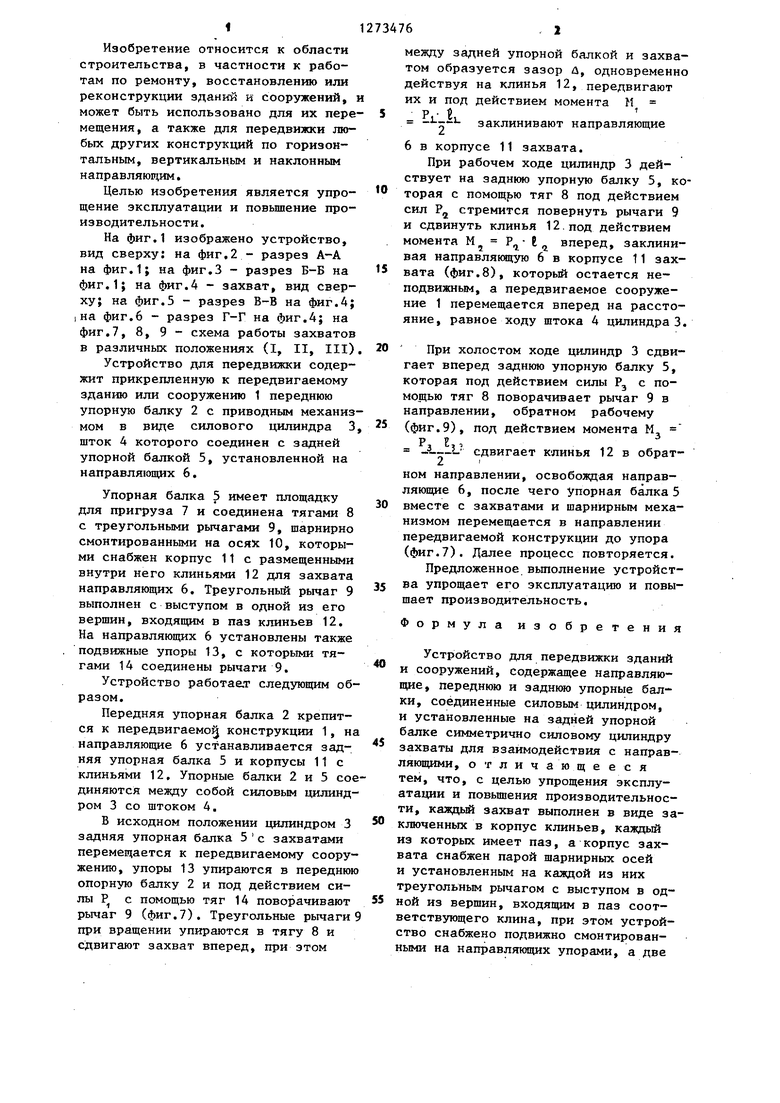
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передвижки (его варианты) | 1983 |
|
SU1151653A2 |
| Устройство для передвижки | 1981 |
|
SU996694A1 |
| СПОСОБ КРЕПЛЕНИЯ И УПРАВЛЕНИЯ КРОВЛЕЙ В ОЧИСТНОМ ЗАБОЕ, КРЕПЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА, МЕХАНИЗМ ТЕЛЕСКОПИЧЕСКОЙ ЗАТЯЖКИ ЗАЗОРОВ ПО КРОВЛЕ И ЗАВАЛУ, СОЕДИНЕНИЕ ОСНОВАНИЙ СЕКЦИЙ, НАПРАВЛЯЮЩАЯ БАЛКА КРЕПИ, МЕХАНИЗМ РАСПОРА СЕКЦИЙ КРЕПИ, МЕХАНИЗМ СКЛАДЫВАНИЯ КРЕПИ, КОЗЫРЕК ПЕРЕКРЫТИЯ КРЕПИ | 2001 |
|
RU2200843C2 |
| УСТАНОВКА ДЛЯ ВИБРОВДАВЛИВАНИЯ СВАЙ В ГРУНТ | 1999 |
|
RU2158803C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И МОНТАЖА БЛОКОВ ПРОЛЕТНОГО СТРОЕНИЯ | 2011 |
|
RU2479687C1 |
| Передвижной стенд для ремонта думпкаров | 1989 |
|
SU1673239A1 |
| УСОВЕРШЕНСТВОВАННЫЙ СЛЕДЯЩИЙ РЫЧАГ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, ДВИЖУЩЕГОСЯ ВДОЛЬ НАПРАВЛЯЮЩЕГО РЕЛЬСА | 1995 |
|
RU2124996C1 |
| Машина для возведения искусственных целиков из блоков | 1978 |
|
SU717375A1 |
| Устройство для передвижки | 1983 |
|
SU1157198A2 |
| Шпиндельный узел | 1986 |
|
SU1743719A1 |


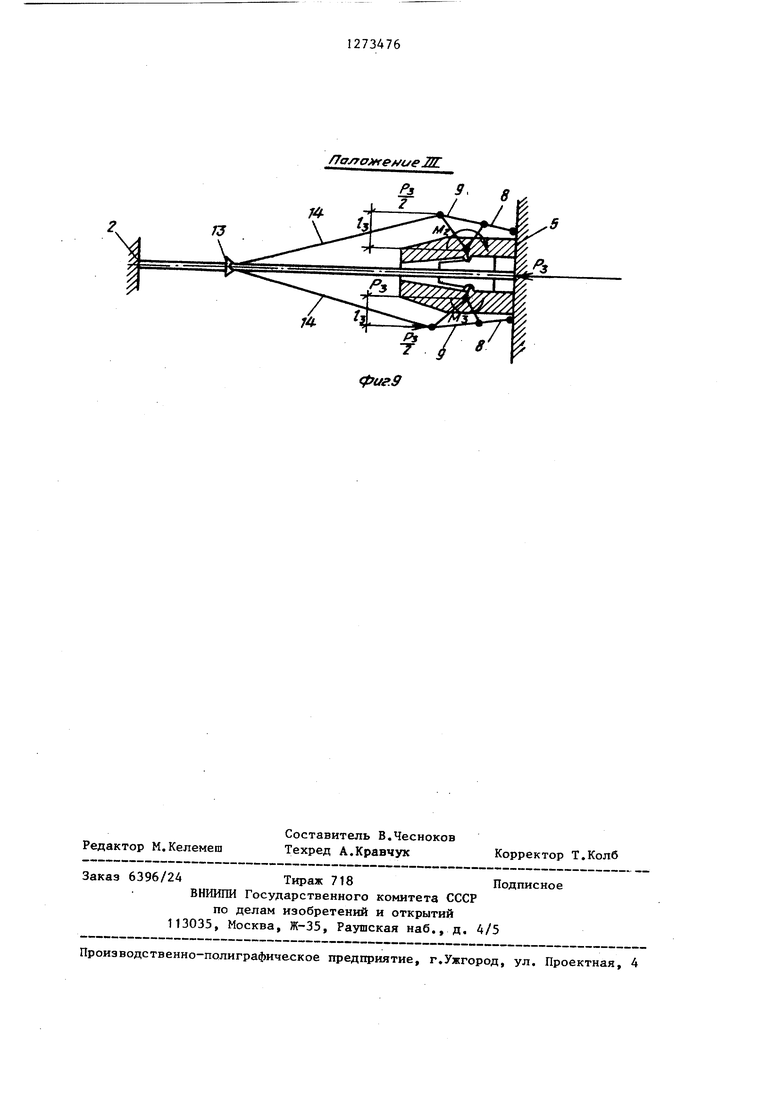
Изобретение относится к области строительства, в частности к работам по ремонту, восстановлению и реконструкции зданий и сооружений, и может быть использогано для их перемещения по горизонтальным, вертикальным и наклонным направляющим. Цель изобретения состоит в упрощении эксплуатации и повышении производительности за счет исключения усилий, отрывающих рельс от основания и разрушающих его, путем выполнения захватов в виде шарнирных механизмов с трехплечими рычагами и клиньями. Устройство содержит прикрепленную к передвигаемому зданию или сооружению 1 переднюю упорную балку 2 с приводным механизмом в виде гидроцилиндра 3, шток 4 которого соединен с задней упорной балкой 5, установленной на направляющих 6. Упорная балка 5 имеет площадку для пригруза 7 и соединена с помощью тяг шарнирных механизмов с двумя захi ватами. Каждый захват состоит из корпуса 11, клиньев, шарнирно связанных с треугольным рычагом, который соединен с помощью тяг 8 с задней упорной балкой 5 и тягами 14 с упором 13 на направляющих 6. 9 ил. to sl со Ji 
/
/
tpuf.3
/7а о ениеЖ
гЛ
П
фие.в
| Устройство для передвижки | 1981 |
|
SU996694A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
