Изобретение относится к системам автоматического регулирования процес сов с транспортным запаздыванием и может найти применение в системах регулирования процессов производства длинномерных изделий, например кабелей, проводов, листового проката и т.д. Целью изобретения является увеличение точности регулирования в условиях переменности транспортного запаздывания . На фиг.1 приведена структурная сх схема устройства; на фиг.2 - датчик тактовой длины. Устройство содержит второй сумматор 1, усилитель 2, интегратор 3, ключ А, формирователь 5 импульсов, датчик 6 тактовой длины, объект 7, первый сумматор 8 и задатчик 9. Датчик 6 тактовой длины содержит издели 10, мерное колесо 11, магнит 12, гер кон 13, клемму 14 источника питания, резистор 15 и конденсатор 16. Формирователь 5 импульсов может быть реализован, например, в виде одновибратора. Устройство работает следующим образом. В установившемся режиме работы при постоянном транспортном запаздывании ошибка регулирования х на выхо де первого 8 сумматора равна нулю. Поэтому периодическое включение ключ 4 за счет импульсов с выхода датчика 6 тактовой длины, сформированных формирователем 5 импульсов, ничего не меняет в процессе регулирования. При изменении величины транспортного запаздывания точность процесса регулирования может существенно изменить ся, если параметры регулятора не ада птируются к этому изменению. Адаптивные свойства оегулятора проявляются в виде изменившейся частоты подачи импульсов с выхода датчи ка 6 тактовой длины, что приводит к эквивалентному изменению коэффициент усиления по интегральной составляюще ошибки регулирования. Возможность подобной коррекции вытекает из следу ющего. Численньш анализ процессов стабштзацяи для объекта первого порядка с запаздыванием показываетучто применительно к закону управления y k x -kj;xdt, (1) где у Т сигнал воздействия на объект регулирования; k ,k | коэффициенты усиления пропорциональной и интегральной частей ошибки х. . Изменение коэффициента k незначиельно сказывается на качестве (точости) процесса регулирования при зменении величины транспортного зааздывания t относительно его номиального значения. Изменение же веичины k по закону где c const, ущественно улучшает процессы при изенении С . Считая, что скорость протяжки изменяется медленее ошибки регулирования, закон управления (1) можно записать в виде y k x Mxde(2) e-oih где о. - расстояние от места введения управляющего воздействия., до датчика 6 тактовых импульсов; t текущая длина изделия - объект регулирования; oL - некоторьй фиксированный, достаточно малый интервал. При номинальной скорости протяжки время запаздывания Т const и настройки регулятора К,., и К оптимальны. При отклонении скорости U от номинального значения время запаздывания Т может изменяться в широких пределах. Но при изменении скорости V изменяется скорость вращения колеса датчика тактовой длины, а следовательно, и время прохождения изделием тактовой длины дЕ , что в соответствии с выражением (2) обеспечивает адаптацию регулитора к изменению времени запаздывания. Высокое качество регулирования, обусловленлчое адаптацией предлагаемого регулятора к переменному времени запаздывания, обеспечивает увеличение точности стабилизации геометрических размеров изготавливаемого длинномерного изделия, что позволяет работать на нижнем допуске по геометрическим параметрам. Формула изобретения Регулятор для объекта с переменным транспортным запаздыванием, содержащий последовательно включенные задатчик, первый сумматор, усилитель, второй сумматор и объект, выход которого Соединен с вычитающим входом первого сумматора, выход интегратора соединен с вторым входом второго сумматора, от. личающийся тем, что, с целью увеличения точности регулирова- 5
кия, в него дополнительно введены
интегратора. последовательно соединенные датчик тактовой длины, формирователь импульсов и ключ, информационный вход которого -соединен с выходом первого сумматора, а выход соединен с входом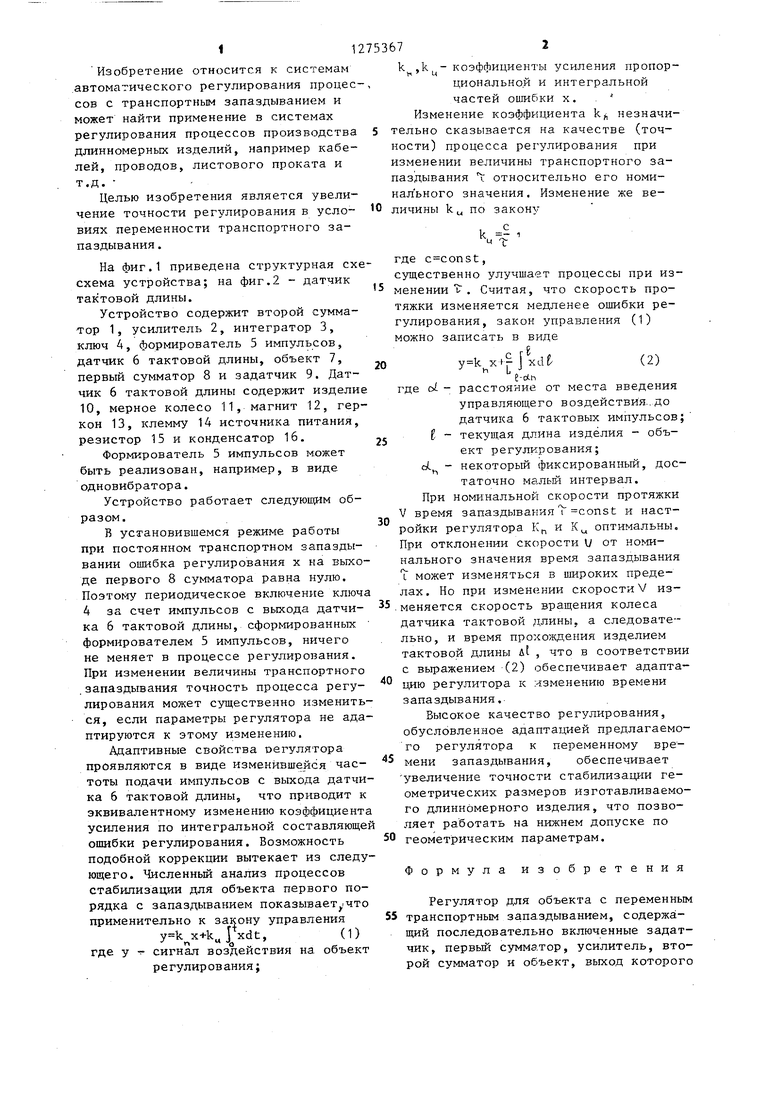
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ПЕРЕМЕННЫМ ТРАНСПОРТНЫМ ЗАПАЗДЫВАНИЕМ | 2003 |
|
RU2258950C2 |
| Устройство автоматического регулирования процесса сушки материала | 1984 |
|
SU1313923A1 |
| Регулятор электрической мощности переменного тока(его варианты) | 1981 |
|
SU983690A1 |
| Система автоматического управления дробильным комплексом | 1988 |
|
SU1585001A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
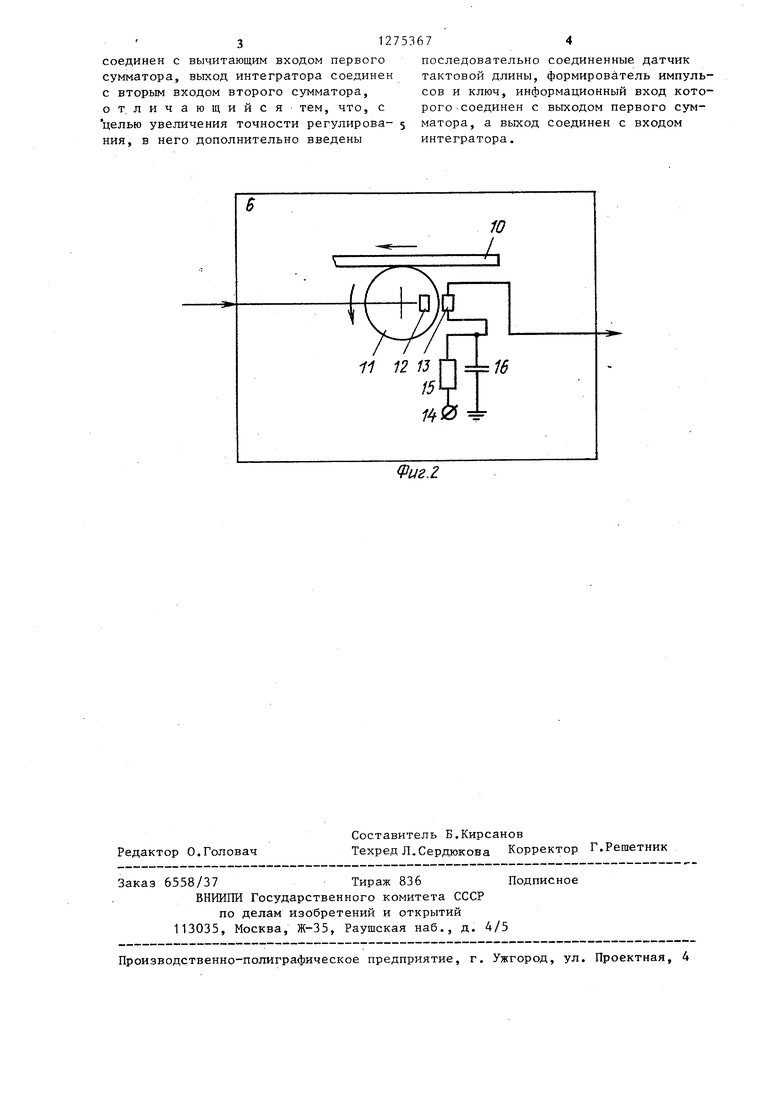
Изобретение относится к области систем автоматического регулирования ; процессов с переменным транспортным запаздыванием и может быть использовано в системах регулирования процессов производства длинномерных изделий. Целью изобретения является увеличение точности регулирования. Устройство содержит второй. 1 сумматор, усилитель 2, интегратор 3, ключ 4, формирователь 5 импульсов, датчик 6 тактовой длины, объект 7, первый 8 сумматор и задатчик 9. Цель изобретения достигается адаптацией настроек регулятора к изменениям величины транспортного запаздывания. Новым в регуляторе является то, что.он содержит блок дискретизации в цепи интегрирующего звена, осуществляющий квантование входного сигнала регулятора, . и датчик тактовой длины, определяющий I интервалы времени, через которые осуществляется дискретизация. Величина (Л каждого интервала времени соответствует перемещению объекта регулирования на одно и то же фиксированное расстояние, вследствие чего регулятор является адаптивным к переменной величине транспортного запаздывания. ND 2 ил. Kj СП 00 ф vi
W
I
Фиг.г
| Штейнберг Ш.Е | |||
| и др | |||
| Промышленные автоматические регуляторы | |||
| - М.: Энергия, 1973, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Руководство,по проектированию систем автоматического-управления | |||
| Под ред | |||
| В.А.Весекерского | |||
| - М.: Высшая школа, 1983, с | |||
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
