Изобретение относится к гидросистемам углелобьц аюихих агрегатов и комплексов для подземной добычи угля.
Цель изобретения - повышение точности шага неремен1.ения базы за счет ограни- чения ве;1ичины его корректировки.
На чертеже представлена принципиальная схема системы, которая содержит гидро- нилиндр 1 со штоковой 2 и бес1нтоковой 3 полостями, порционер 4 с нриводпой 5, насосной 6 и дополнительной 7 полостями, следяпхий золотник 8, три гидрозамка 9-11, пятилинейный гидрораспределитель 12. Линии 13 и 14 гидрораснределителя 12 сооб- ш,ен с гидролиниями 15 и 16 слива и нагнетания соответствен}10. Линия 17 гидрораснределителя 12 связана со штоковой полостью 2 гидроцилиндра 1 и полостью 18 управления гидрозамка 9, линия 19 связана с дополнительной полостью 7 норционера 4, нолостью 20 унравления гидрозамка 10 и линией 21 золотника 8, линия 22 связана с входами 23 и 24 гидрозамков 9 и 1 I и линией 25 золотника 8, линия 26 которого сообпдена с полостью 27 управления гидрозамка 11. Вход 28 гидрозамка 10 сообщен с нолостью 3, выходы 29 и 30 гидрозамков 9 и 10 сообше- ны с насосной полостью 6 порционера 4, а выход 31 гидрозамка 11 - с приводной полостью 5 норционера 4. Порционер 4 имеет регулировочный винт 32 и поршни 33 и 34.
Схема работает следующим образом.
В исходном положении база механизированной крепи прямолинейна, следящие золот- НИКИ 8 но всей длине лавы находятся в средних (по чертежу) положениях, линейный гидрораспределитель 12 находится в первой позиции.
Для зарядки норционера 4 гидрораспределитель 12 устанавливают во вторую позицию. Из гидролинии 16 рабочая жидкость поступает в полости 5 и 6 порционера 4. Таким бразом, эти юлости оказываются заряженными. Величина порции рабочей жидкости в полости 6 определяется положением регулировочного винта 32.
Для фронтального перемещения базы механизированной крепи на заданный шаг гидрораспределитель 12 устанавливают в третью позицию. При этом рабочая - жидкость под давлением поступает в полость 7, в управляющую полость 20 гидрозамка 10. Запасен- на я в насосной полости 6 жидкость поступает через открытый гидрозамок 10 в бесшто- ковую полость 3 гидроцилиндра 1, обеспечивая передвижку базы на заданный Hjar. Если база на стыке прямолинейна или стык опережает соседние стыки, то золотник 8 запирает управляющую полость 27 гидрозамCiK TjiBHTejb А. Волко 1
Редактор И. ДсрбпкТехред И. ВересКорректор
Заказ 6814;28Тираж-)70Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
13035, Москва, , Раушская наб., д. 4/5
Филиа.л ППП «Патент, г. Ужгород, ул. Проектная, 4
ка 11 либо соединяет ее со сливной гидролинией 15. В обоих этих случаях полость 5 остается запертой гидрозамком 11. Если какой-либо стык секций базы отстает от соседних, то расположеннь й на этом стыке золотник 8 соединяет управляющую полость 27 гидрозамка II с гидролинией 16, благодаря чему ход поршня 34 оказывается увеличенным и из насосной полости 6 порционера 4 в бесщтоковую полость 3 гидроцилиндра 1 поступает запасенная в полости 6 жидкость. Таким образом обеспечивается автоматическое выравнивание базы.
Для передвижки крепи гидрораспределитель 12 устанавливают в четвертую позицию. При этом жидкость из гидролинии 16 поступает в штоковую полость 2, а из бес- штоковой полости 3 жидкость поступает в сливную гидролинию 15. При передвижке крепи порционер 4 и следящий золотник 8 не работают.
Формула изобретения
Система поддержания прямолинейности базы механизированной крепи, содержащая гидроцилиндр передвижки со штоковой и бес- штоковой полостями, следящий золотник, порционер с приводной и насосной полостями, три гидрозамка и пятилинейный четырех- позиционный гидрораспределитель, первые две линии которого сообщены с гидролиниями нагнетания и слива, третья линия - со штоковой полостью гидроцилиндра и полостью управления первого гидрозамка,вход которого связан с четвертой линией гидрораснределителя, а вьр.од - с насосной полостью порционера и с выходом второго гидрозамка, вход которого сообщен с бесшто- ковой полостью гидроцилиндра, а полость управления - с пятой линией гидрораспределителя, отличающаяся тем, что, с целью повышения точности шага пере.мещения базы за счет ограничения величины его корректировки, следящий золотник выполнен трехлинейны.м, порционер выполнен в виде плунжерного гидроцилиндра, в насосной полости которого установлен поршень с об- разование.м дополнительной полости, связанной с пятой линией гидрораспределителя и с одной из линий следящего золотника, вторая линия которого связана с полостью управления третьего г |дрозамка, вход которого сообщен с третьей линией следяшего золотника и с четвертой линией гидрорас- п)еделителя, а выход - с приводной полостью порционера.
. Ильин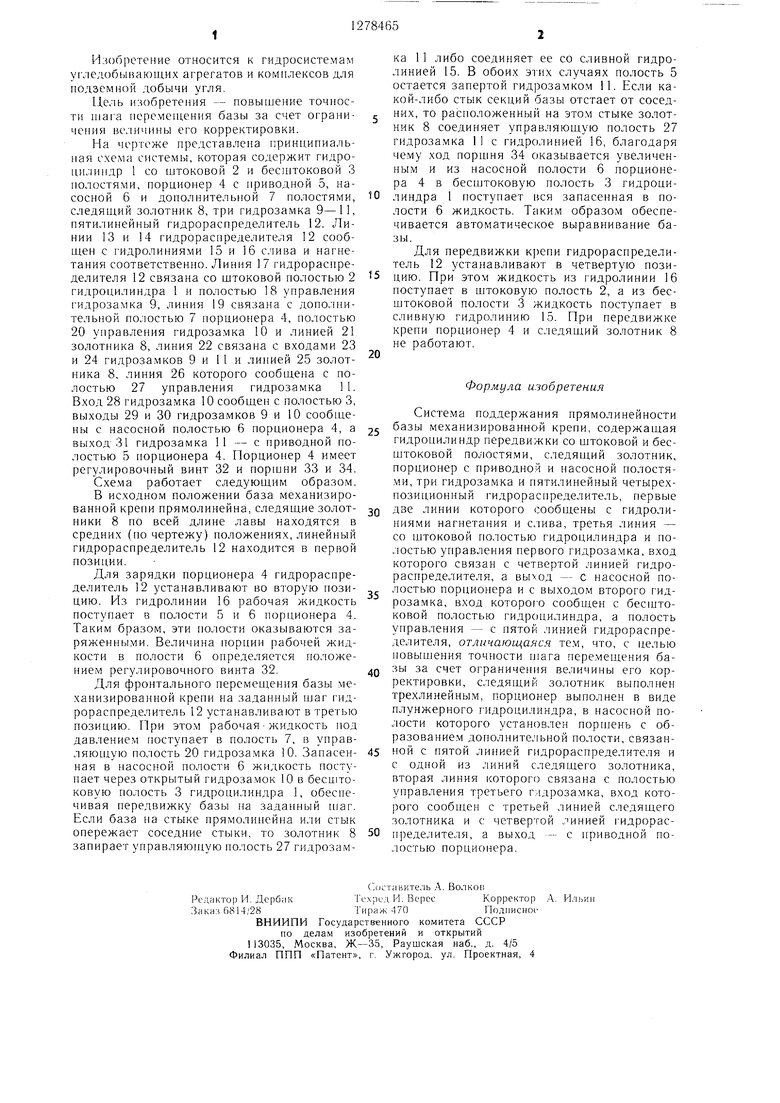
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шагового перемещения базы механизированной крепи | 1979 |
|
SU861640A1 |
| Устройство для передвижки стругового механизированного комплекса | 1988 |
|
SU1528907A1 |
| Устройство для поддержания прямолинейности базы угледобывающего агрегата | 1981 |
|
SU1059205A1 |
| Гидросистема секции механизированной крепи | 1984 |
|
SU1213212A1 |
| Устройство для передвижения базы очистного агрегата (его варианты) | 1981 |
|
SU1059171A1 |
| Гидросистема секции механизированной крепи | 1985 |
|
SU1283414A1 |
| Устройство для прямолинейного перемещения базы крепи | 1975 |
|
SU575427A1 |
| Устройство для прямолинейного перемещения базы крепи | 1990 |
|
SU1760184A1 |
| ГИДРОСИСТЕМА СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1999 |
|
RU2161254C1 |
| УСТРОЙСТВО БЛОКИРОВКИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ | 1992 |
|
RU2065093C1 |
Изобретение относится к области гидропривода и может быть использовано в гидросистема.х угледобывающих агрегатов и комплексов для подземной добычи угля. Изобретение позволяет повысить точность шага перемещения базы за счет ограничения величины его корректировки. При отставании какого-либо стыка секции базы от соседних расположенный на этом стыке золот- иик 8 соединяет управляющую полость 27 гидрозамка 11 с гидролинией 16 нагнетания. Ход поршня 34 порционера 4 увеличивается, и из его насосной полости 6 в бесштоковую полость 3 гидроцилиндра 1 поступает вся запасенная в полости 6 жидкость. Обеспечивается автоматическое выравнивание базы. 1 ил. а (С (Л 5 ю 00 4 О5 СП
| Система поддержания прямолинейности базы механизированной крепи | 1977 |
|
SU630428A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
