Изобретение относится к автомати ке и вычислительной технике ;-; может быть использовано в системах ЧКСЛОЕОго программного утгравления станк,
Целью изобретения является повышение быстродействия и упрош.вние: устройства,
На фиг„ 1 представлена с.лекг:. уст ройства; на фиг, 2 схема линейного интерполятора (в варианте); на фиг„3AHarpaNJMa, поясняющая работу устройства.
Устройство (фиг.1) СОСТ01 т из генератора 1 тактовых импульсов 5 элемента И 2, триггера 3, трехкоординатного линейного интерпол)ггора А второго 5, третьего 6 и первого 7 счетчиков импульсов и элемента 8 I-Dl.H,
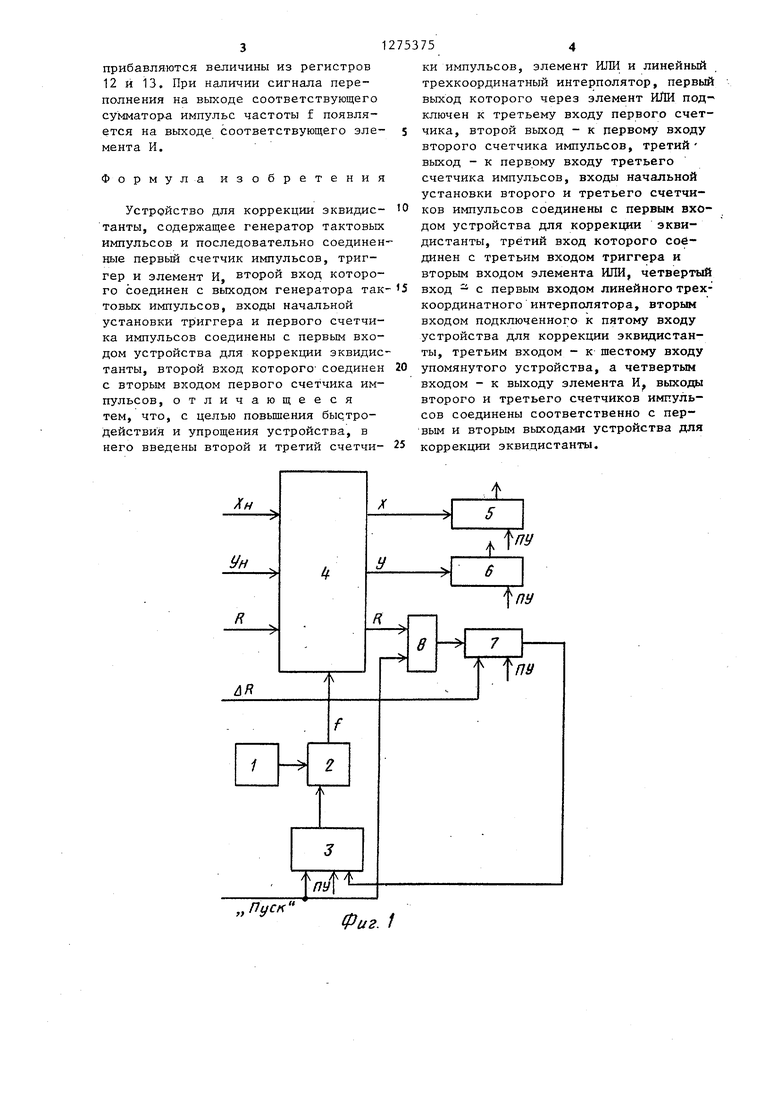
Интерполятор 4 (фиг.2) построен на цифровых дифференциальных анализаторах (11ДА) и состоит из трех накапливающих сумматоров 9-11,, первого 12, второго 13 и третьего 14 регистров и элементов И 15-17.
Устройство работает следующим образом.
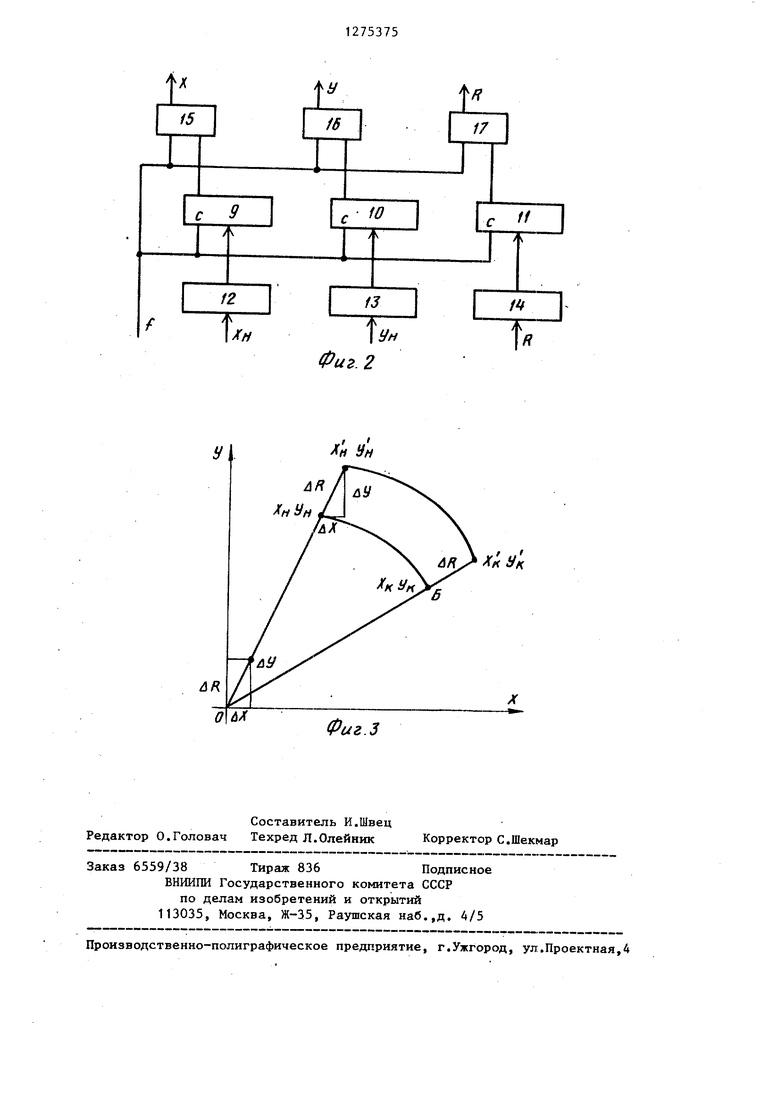
В исходном состоянии триггер 3 и счетчики 5-7 импульсов сигналом предварительной установки (ПУ) сброшены в ноль. Информация с выхода блока ввода программы (не показан) распределяется по блокам устройства следующим образом. В рабочие регистры интерполятора 4 заносятся в прямом коде координаты начальной точки нескорректированной траектории Хц,, Уц и радиус нескорректированной дуги R (фиг, 2 и 3)S а в счетчик 7 величина коррекции радиуса UR в обраном коде. Если в качестве счетчика используется вычитающий счетчикj то величина коррекции радиуса заносится в прямом коде. По сигналу Пуск в счетчик 7 добавляется через эле™ мент ИЛИ 8 единица, а триггер 3 устанавливается в единичное состояние и открывает элемент И 2, В результате импульсы высокой частоты с выхода генератора 1 через элемент И 2 начинают поступать на вход аргумента интерполятора 4. Интерполятор начинает отрабатывать прямую ОА (фиг.З), при этом приращешая по координатам X, У подсчитываются счетчиками 5 и 6, а длина пути по прямой ОА - счетчиком 7 импульсов„ Так как по сигналу Пуск обратный код в счетчике преобразовывается в до-лолнительный код, то как только с выхода координаты R интерполятора 4 на вход счетчика через элемент 1ШИ 8 поступ 1ет количество импульS сов 5 равное iR, счетчик 7 переполняется,, и его выходной сигнал сбрасывает в ноль триггер 3. Элемент И 2 закрывается. Цикл вычитания корректирующих поправох закончен.
0 Так как координаты Х, У и R
(фиг.З) связаны линейной зависимостью (с помощью линейного интерполятора 4)5 то к моменту окончания отработки координатой AR величины R
5 координаты X и У отрабатывают величины йХ и /lis равные искомым поправкам. Величины этих поправок оказываются в счетчиках 5 и 6 соответственно о Вычисленные поправки ис20 пользуются.для алгебраического суммирования с величинами Х, УН и дают значения Х, У, начальной точки скорректированной дуги.
Разрядность интерполятора 4 мо25 жет быть ограничена разрядностью поправки uR,jjv;i-, без потери точности, как это показано в известном устройстве ,
По сравнению с известным предла30 гаемое устройство вычисляет поправку быстрее в два раза, так как трехко- ордиыатный линейный; интерполятор выполняет интерполяцию одновременно по всем координатам, в то время, как
J,- интерполяторы извес.тного устройства работают поочередно. Кроме того, объем электронного оборудования предлагаемого устройства в 2-2,5 раза меньше, чем известного, так как
40 в нем имеется всего один интерполятор, а не два, и отсутствует сложная схема управления следящим режимом. Вычисления поправок к конечным точкам дуги выполняются автоматически,
43 так как поправки конечной точки дуги П-го кадра програм1-1Ы равны (при эквидистантных контурах) поправкам начальной точки (п+1)-го кадра програма значит, и вычислять их прихо;чЗз1,
fri дится один раз, за кадр во время очередного кадра.
Интерполятор работает следующим образом
. В регистры заносятся соот55 ветственно величины Х, У,, R. При поступлении импульсов tjacTOTbi f на входы суммирования накапливающих сумматоров 9-11 к их содержимому прибавляются величины из регистров 12 и 13, При наличии сигнала переполнения на выходе соответствующего сумматор-а импульс частоты f появляется на выходе соответствующего элемента И. Формула изобретения Устройство для коррекции эквидистанты, содержащее генератор тактовых импульсов и последовательно соединен ные первый счетчик импульсов, триггер и элемент И, второй вход которого соединен с выходом генератора так товых импульсов, входы начальной установки триггера и первого счетчика импульсов соединены с первым входом устройства для коррекции эквидистанты, второй вход которого соединен с вторым входом первого счетчика импульсов, отличающееся тем, что, с целью повьшения быс.тродействия и упрощения устройства, в него введены второй и третий счетчи- 25 20 ки импульсов, элемент ИЛИ и линейный трехкоординатный интерполятор, первый выход которого через элемент ИЛИ подключен к третьему входу первого счетчика, второй выход - к первому входу второго счетчика импульсов, третий выход - к первому входу третьего счетчика импульсов, входы начальной установки второго и третьего счетчиков импульсов соединены с первым входом устройства для коррекции эквидистанты, третий вход которого соединен с третьим входом триггера и вторым входом элемента ИЛИ, четвертый вход - с первым входом линейного трехкоординатного интерполятора, вторым входом подключенного к пятому входу устройства для коррекции эквидистанты, третьим входом - к шестому входу упомянутого устройства, а четвертым входом - к выходу элемента И выходы второго и третьего счетчиков импульсов соединены соответственно с первым и вторым выходами устройства для коррекции эквидистанты.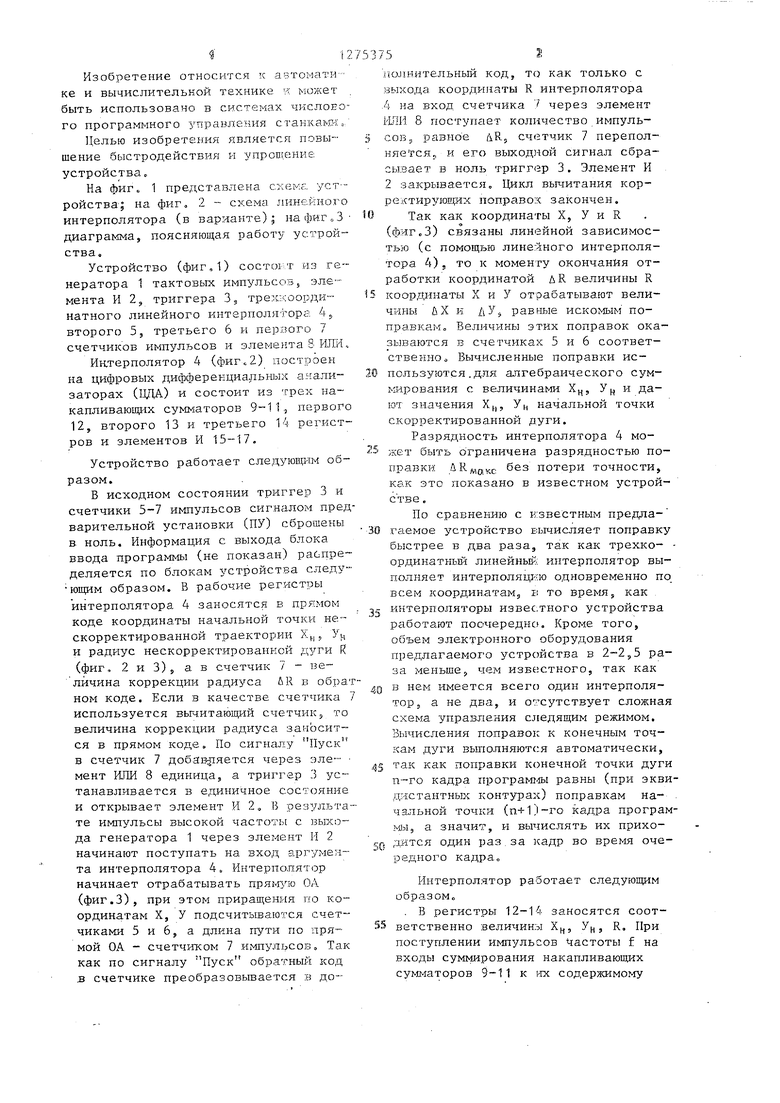
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции эквидистанты | 1986 |
|
SU1318992A1 |
| Устройство для программного управления | 1985 |
|
SU1280571A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU807236A1 |
| Устройство для коррекции эквидистанты | 1991 |
|
SU1803904A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1282082A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1317398A1 |
| Устройство для числового программного управления станками | 1985 |
|
SU1291928A1 |
| Устройство для коррекции эквидистанты в системах числового программного управления | 1985 |
|
SU1282083A1 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах числового программного управления .станками. Целью изобретения является повышение быстродействия и упрощение устройства. Оно состоит из генератора тактовых импульсов, элемента И, триггера, трехкоординатного линейного интерполятора, счетчиков импульсов, элемента ИЛИ. Устройство вычисляет поправку в два раза быстрее по сравнению с прототипом, так как трехкоординатный линейный интерполятор выполняет интерполяцию; одновременно по всем координатам, а интерполяторы прототипа работают поочередно. 3 ил.
Пуск
Фиг. 1
t
Фиг.З
| Способ коррекции эквидистанты в системах числового программного управления | 1974 |
|
SU591822A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
