Изобретение относится к автомаике и вычислительной технике, в астности к системам, предназначеным для точной обработки рабочим органом заданного перемещения в течение заданного времени, и может быть использовано для управления электроприводами поточно-транспортных линий или других механизмов, работающих в старт-стопном режиме, для которых в каждом рабочем цикле регламентируется величина перемещения и его продолжительность.
Целью изобретения является уменьшение тепловых потерь в электроприводе при отработке заданного перемещения за-заданное времй.
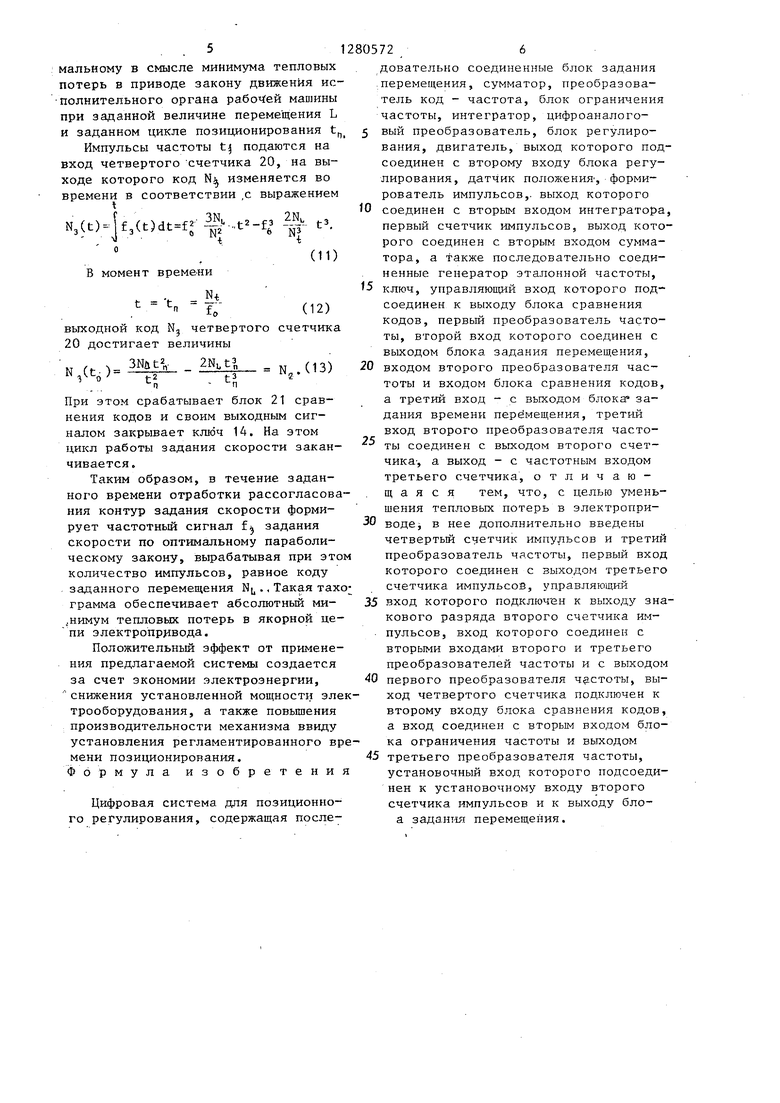
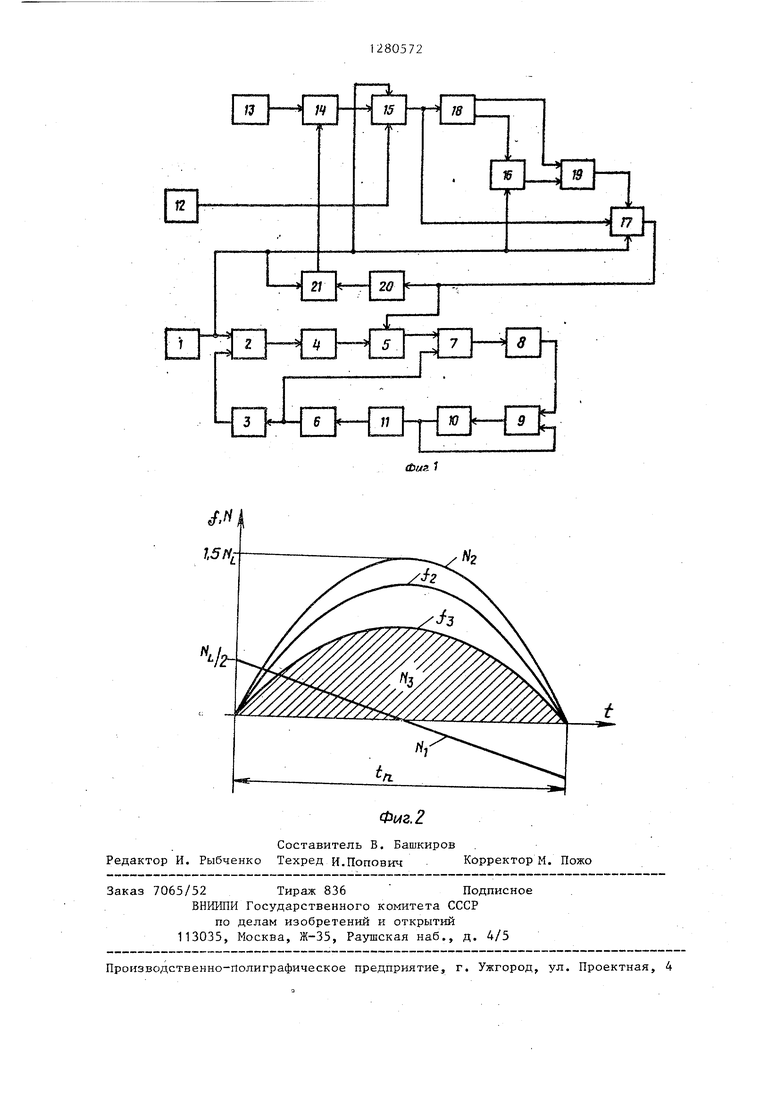
На фиг, 1 приведена блок-схема системы; на фиг. 2 - временные диаграммы сигналов контура задания скорости.
Цифровая система содержит блок 1 задания перемещения, сумматор 2, пер
вый счетчик 3 импзшьсов, преобразователь 4 код - частота, блок 5 ограничения частоты, формирователь 6 импульсов, интегратор 7, цифроана- логовый преобразователь 8, блок 9 регулирования, двигатель 10, импульс ный датчик 11 положения, блок 12 за- дения времени перемещения, генератор 13 эталонной частоты, ключ 14, первый, второй и третий преобразователи 15, 16 и 17 частоты, второй, третий и четвертый счетчики 18, 19 и 20 з-шпульсов и блок 21 сравнения кодов. Блоки составляют контур задания скорости;
Система работает следующим образо В исходном состоянии на выходе блока 1 задания перемещения код заданного положения Nj равен нулю. Первый счетчик 3 импульсов и интегратор 7 находятся в нулевом состоянии, сигнал задания скорости U на выходе цифроаналогового преобразователя 8 равен нулю, и двигатель 10 электропривода находится в состоянии покоя,
Введенный в блок 1 -задания перемещения код Нл заданного положения подается на первьш вход сумматора 2, На выходе сумматора возникает код рассогласования iN, которьш подается на вход преобразователя 4 код - частота. На выходе преобразователя 4 имеющего линейную характеристику, возникают импульсы,- следующие с
280572
частотой f
(О
ts
20
25
- 30 эс
м.40
, 4,
, величина которой пропорциональна коду рассогласова 1ия bN,, Импульсы частотой t поступают на первый вход блока 5 ограничения частоты. На вьгходе блока 5 возникают импульсы, частота f следования которых равна частоте f импульсов, поступающих на его второй вход с выхода блока 21 сравнения кодов, Вы- рабатываемь}е блоком 5 импульсы суммируются в интеграторе 7, выходная величина N которого преобразуется цифроаналоговым преобразователем 8 в напряжение задания скорости U, которое подается на вход блока 9 регулирования, управляющего скоростью двигателя 10. При этом двигатель начинает разгоняться, импульсньш датчик 11 начинает выдавать импульсы, частота следования которых пропорциональна скорости вращения двигателя. Эти импульсы через формирователь 6 импульсов подаются на второй вход интегратора 7 и являются сигналом обратной связи в цифровом контуре регулирования скорости. С выхода формирователя 6 импульсы подаются также на вход счетчика 3 ш тульсов, производящего их суммирование. На выходе счстх1ика 3 код Кл представля- ет собой фактичесрсое положение и является сигналом обратной связи в цифровом контуре регул;- ротзания положения,
В процессе отра.ботки заданного перемещения разгон и тор;- оже1п- е электропривода осуществляются в ствии с величиной сигнала заданной скорости, отраба.тываемого цифровым контуром регулирования скорости, при этом количество импульсов частоты f;, в точности соответствует заданной велтпдане персмеу «;-ип..
45 В конце цикла отработки заданного перемещения при f , контроль от- работки заданного перемещения осуществляется цифровым контуром регулирования положения/ В этом случае .при наличии ошибки в позиционировании (капрхмер, из-за инерционности контург. регулирования скорости либо из-за наличия статической нагрузки) на вход интегратора 7 через блок 5 поступают 1-;:лтульсы частотой
50
55
f . Код NP на выходе интегратора, а следовательно, и сигнал 1Ц на выходе цифроаналогового преобразователя изменяются таким образом, чтобы уст-.
1280572
ранить рассогласование. При достижеж
нии величиной N значения N,j рассогласование становится равным нулю и электропривод останавливается в заданном положении.
Реализацию оптимальной, соответствующей минимуму тепловых потерь в электроприводе, параболической та- хограммы обеспечивает контур задания скорости, временные диаграммы сигналов которого приведены на фиг,2
Контур задания скорости работает следующим образом.
В исходном состоянии счетчики 18, 19 и 20 импульсов находятся в нулевом положении, код заданного времени Nt перемещения и код М заданного положения равны нулю, сигналы на выходах преобразователей частоты также равны нулю, ключ 14 открыт.
Введение в блок 1 задания перемещения и в блок 12 задания времени перемещения коды N2 и М подаются в контур задания скорости. При этом по установочному входу гз счетчпк 18 заносится величина частотный вход первого преобразователя 15 .частоты через ключ 14 начинает поступать частотньш сигнал генератора 1 3
выходе преобразователя 15 частота следования импульсов определяется выражением
д С выхода талонной частоты, На
(1)
в котором
f о
(2)
N,
d.,
(3)
N4
(4)
де d.
принятая дискретность задания времени перемещепия (цепа импульса генератора 13 эталонной частоты); принятая дискретность задания и измерения перемещения (цена импульса на выходе формирователя 6 импульсов) ;
заданная величина перемещения j заданное время перемещения.
С выхода первого преобразователя 5 частоты импульсов частоты со знакЪм минус поступают на частотный вход счетчика 18, изменяя его выходной код в соответствии с выражением
2
Т
- f
b.,t
N. -V
Импульсы f( поступают также на частотный вход второго преобразователя 16 частоты, на выходе которого частота f следования импульсов определяется соотношением
где k 12 - постоянньш коэф(1)ициент.
При этом знак частотного сигнала f; определяется знаком NJ кода счетчика 18, а именно; в период разгона привода при положительном N импульсы частоты f,-. суммируются в третьем
счетчике
а при тор ожении при
вода отрицательное значение NJ реверсирует счет импульсов в третьем счетчике 19. Тактам образом, выходной сигнал 1ч третьего счетчика 19 определяется выра;кен11ё
35
тота Г;) следования импульсов определяется выражением
0
f, (t)f,
N,
N|
t-f3
о
6N| N3
(s:
45
Пренебрегая динахмической ошибкой в скорости при двккении электропривода, можно записать, что
f 3
(9)
где V - скорость перемещения рабочего
органа привода.
50 Из (9) с учетом (2), (3), (4) и (8) уравнение скорости перемещения рабочего органа принимает вид
6NL
N3
-t2)
(10)
Полученная параболическая тахо- rpaMi-ia привода соответствует опти™
мальному в смысле минимума тепловых потерь в приводе закону движения ис- полнительного органа рабоч:ей мапшны при заданной величине перемещения L и заданном цикле позиционирования t
Импульсы частоты t подаются на вход четвертого счетчика 20, на выходе которого код N изменяется во времени в соответствии ,с выражением
N3(t)-jf3(t)
3N, N
,
В момент време-ни
t
выходной код 20 достигает
t - fa
N5 четвертого величины
3Nut o. 2Nb tl
N,.(13)
При этом срабатывает блок 21 сравнения кодов и своим выходным СНГ- налом закрывает ключ 14. На этом цикл работы задания скорости заканчивается.
Таким образом, в течение заданного времени отработки рассогласования контур задания скорости формирует частотный сигнал f, задания скорости по оптимальному параболическому закону, вырабатывая при этом количество импульсов, равное коду заданного перемещения NI, ., Такая тахо грамма обеспечивает абсолютный ми- ,нимум тепловых потерь в якорной цепи электропривода.
Положительный эффект от применения предлагаемой системы создается за счет экономии электроэнергии, снижения установленной мощности электрооборудования, а также повышения производительности механизма ввиду установления регламентированного времени позиционирования. Формула изобретения
Цифровая система дпя позиционного регулирования, содержащая после
5
0
довательно соединенные блок задания .перемещения, сумматор, преобразователь код - частота, блок ограничения частоты, интегратор, цифроаналого- вый преобразователь, блок регулирования, двигатель, выход которого подсоединен с второму входу блока регулирования, датчик положения , формирователь импульсов,, выход которого соединен с вторым входом интегратора, первый счетчик импульсов, выход которого соединен с вторым входом сумматора, а также последовательно соединенные генератор эталонной частоты, ключ, управляющий вход которого подсоединен к выходу блока сравнения кодов, первый преобразователь частоты, второй вход которого соединен с выходом блока задания перемещения, входом второго преобразователя частоты и входом блока сравнения кодов, а третий вход - с выходом блока задания времени перемещения, третий вход второго преобразователя частоты соединен с выходом второго счетчика-, а выход - с частотным входом третьего счетчика, отличающаяся тем, что, с целью уменьшения тепловых потерь в электроприводе в нее дополнительно введены четвертьй счетчик импульсов и третий преобразователь частоты, первый вход которого соединен с выходом третьего счетчика импульсов, управляющий вход которого подключен к выходу знакового разряда второго счетчика пульсов, вход которого соединен с вторыми входами второго и третьего преобразователей частоты и с выходом первого преобразователя ч 1стоты, выход четвертого счетчика подключен к второму входу блока сравнения кодов, а вход соединен с вторым входом блока ограничения частоты и выходом 5 третьего преобразователя частоты, установочный вход которого подсоединен к установочному входу второго счетчика импульсов и к выходу бло- а задания перемещения.
5
0
5
0
N2
Ф1лг.2
Составитель В. Башкиров Редактор И. Рыбченко Техред и.Попович Корректор М. Пожо
Заказ 7065/52 Тираж 836 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-Полиграфическое предприятие, г. Ужгород, ул. Проектная, 4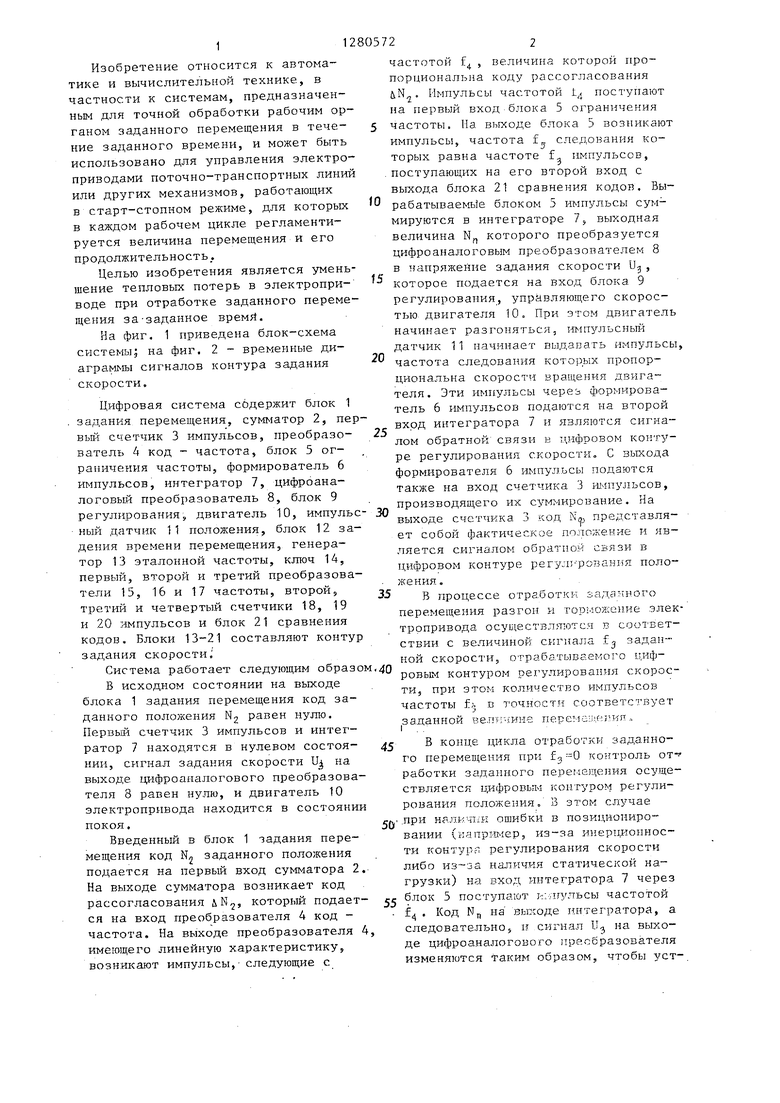

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система для позиционирования электропривода постоянного тока | 1987 |
|
SU1553955A1 |
| Система позиционирования электропривода с энергетической оптимизацией при двухзонном регулировании скорости | 1991 |
|
SU1820361A1 |
| Цифровая система для позиционного регулирования | 1984 |
|
SU1198460A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Цифровая система для позиционногоРЕгулиРОВАНия | 1979 |
|
SU824147A1 |
| Цифровая система регулирования электропривода | 1980 |
|
SU930246A1 |
| Система управления приводом летучих ножниц | 1984 |
|
SU1260121A1 |
| Устройство для регулирования скорости электропривода | 1986 |
|
SU1322229A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
Пре/дложеыа цифро,вая система для позиционного регулирования. Изобретение относится к области автоматики и вычислительной техники и может быть использовано для управления электроприводами поточно-транспортных линий и механизмов, работающих в старт-стопном режиме, у которых в каждом рабочем ц,икле регламентированы величина перемещения и его продо;шительность. Целью изобретения является уменьшение тепловых потерь в электроприводе при отработке задан- ного перемещения за заданное время.- Циф,ровая система для позиционного, регулирования содержит блок задания перемещения, сумматор, первый, второй, третий и четвертый счетчики импульсов, преобразователь код - частота , блок ограничения частоты, формирователь импульсов, генератор, цифроаналоговый преобразователь, блок регулирования, двигатель, импульсный датчик полохсения, блок задания времени перемещения, генератор э талонной частоты, ключ, первый, второй и третий преобразователи частоты и блок сравнения кодов. Закон движения электропривода, реализуемый системой5 соответствует параболической тахограмме, обеспечивающей минимальные тепловые потери в якорной цепи электропривода. 2 ил. i (Л го 00 о ел ю
| Цифровая система для позиционного регулирования | 1984 |
|
SU1198460A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
