;о
00
4 a
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система для позиционного регулирования | 1985 |
|
SU1280572A1 |
| Цифровая система для позиционирования электропривода постоянного тока | 1987 |
|
SU1553955A1 |
| Система позиционирования электропривода с энергетической оптимизацией при двухзонном регулировании скорости | 1991 |
|
SU1820361A1 |
| Цифровая система для позиционногоРЕгулиРОВАНия | 1979 |
|
SU824147A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Цифровая система регулирования электропривода | 1980 |
|
SU930246A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| Система управления приводом летучих ножниц | 1984 |
|
SU1260121A1 |
| Позиционный электропривод | 1983 |
|
SU1124255A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1341620A1 |
1. ЦИФГОВАЯ СИСТЕМА ДЛЯ ПО ЗЩИОННОГО РЕГУЛИРОВАНИЯ, содержащая .последовательно соединенные блок задания перемещения, сумматор, преобразователь код- частота, блок ограничения частоты, интегратор и цифроаналоговый преобразователь, выход которого подключен к первому входу блока регулирования, соединенного выходом через двигатель с входом импульсного датчика положения, выход которого через формировагель. импульсов подключен к входу счетчика импульсов, выход счетчика импульсов соединен с вторым входом сумматора, отличающаяся тем, что, с целью повышения зкономичности и расширения области применения системы, в нее введены блок задания времени перемещения и блок задания скорости, первый вход которого соединен с выходом блока задания времени перемещения, второй вход подключен к выходу блока задания перемещения, выход - к второму входу блока ограничения частоты, второй вход S интегратора соединен с выходом формировасл теля импульсов.
Фие.1
Изобретение относится к устройствам для автоматического управления и регулирования электропривода, предназначено для точной отработки рабочим органом заданного перемещения в течение заданного времени и может быть использовано для управления электроприводами поточно-транспортных линий или других механизмов, работающих в старт-стопном режиме, для котсфых в каждом рабочем цикле регламентируются величина перемещения и его длительность, а также для позиционирования механизмов резки проката в непрерывном технологическом потоке.
Цель изобретения - повышение экономичности и расширение области применения сиетемы.
На фиг. 1 приведена блок-схема системы; на фш-. 2 - схема блока задания скорости перемещения; на фиг. 3 - временные диаграммы сигналов.
Система содержит блок 1 задания перемещения, сумматор 2, первый счетчик 3 импульсов, преобразователь 4 код-частота, блок 5 ограничения частоты, формирователь 6 импульсов, интегратор 7, дифроаналоговый преобразователь 8, блок 9 регулирования, двигатель 10, импульсный датчик 11 положения, блок 12 задания времени перемещения и блок 13 задания скорости.
Блок 13 задания скорости (фиг.2) содержи генератор 14 эталонной частоты, первый 15 и второй 16 ключи, первый 17 и второй 18 преобразователи частоты, второй 19 и третий 20 счетчики импульсов, и блок 21 сравнения кодов.
Система работает следующим образом.
В исходном состоянии на выходе блока 1 задания перемещения код заданного положения NI равен нулю. Первый счетчик 3 импульсов и интегратор 7 находятся в нулевом состоянии, сигнал задания скорости н&
198460
, с установочным входом первого счетчика импульсов, выход второго ключа соединен с вторым входом второго преобразователя частоты, установочные входы блока сравнения кодов, первого и второго преобразователей частоты соединены с вторым входом бло задания скорости, первый вход которого соединен с третьим входом первого преобразователя частоты, выход - с выходом второго преобразователя частоты.
выходе дифроаналогового преобразователя 8
равен нулю и двигатель 10 электропривода
находится в состоянии покоя.
Введенный в блок 1 задания перемещения код NI заданного положения подается на первый вход сумматора 2. На выходе сумматора возникает код рассогласования д М|, которьш подается на вход преобразователя 4 код-частота. На выходе преобразователя 4, имеющего линейную характеристику, возникают импульсы, следующие с частотой ij , величина которой пропорциональна коду рассогласования U N 1 . Импульсы частоты , поступают на первый вход блока 5 ограничения частоты. На выходе блока 5 возникают имг1ульсы, частота 1ц следования которых
равна частоте f j. импульсов, поступающих на его второй вход с выхода блока 13 задания скорости. Вырабатываемые блоком 5 импульсы суммируются в цифровом интеграторе 7, выходная величина Nn которого преобразуется цифроаналоговым преобразователем 8 в напряжение задания скорости U , которое подается на вход блока 9 регулирования, управляющего скоростью двигателя 10. При этом двигатель начинает разгоняться, импульсный датчик 11 начинает выдавать импульсы, частота следования которых пропорциональна скорости вращения двигателя. Эти импульсы через формирователь 6 импульсов подаются на второй вход интегратора 7 и являются сигналом обратной связи в цифровом контуре регулирования скорости. С выхода формирователя 6 импульсы подаются также на вход счетчика 3 импульсов, производящего их суммирование. На выходе счетчика 3 код N представляет собой фактическое положение механизма и является сигналом обратной связи в цифровом контуре регулирования положения.
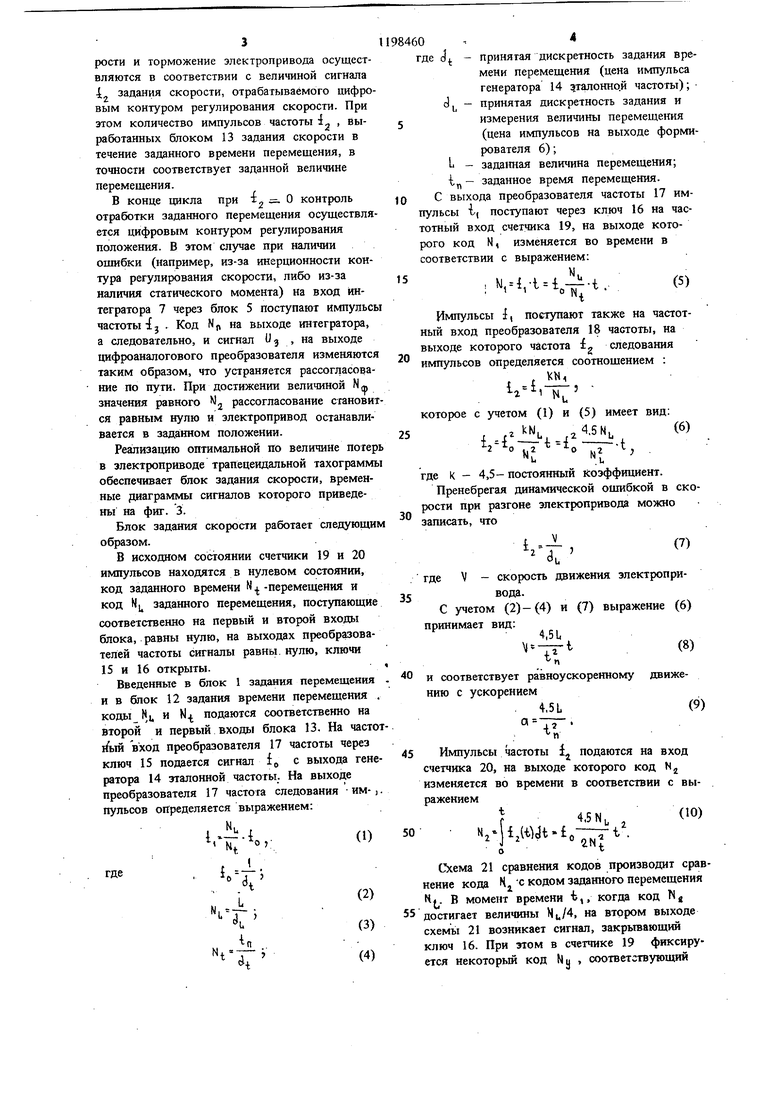
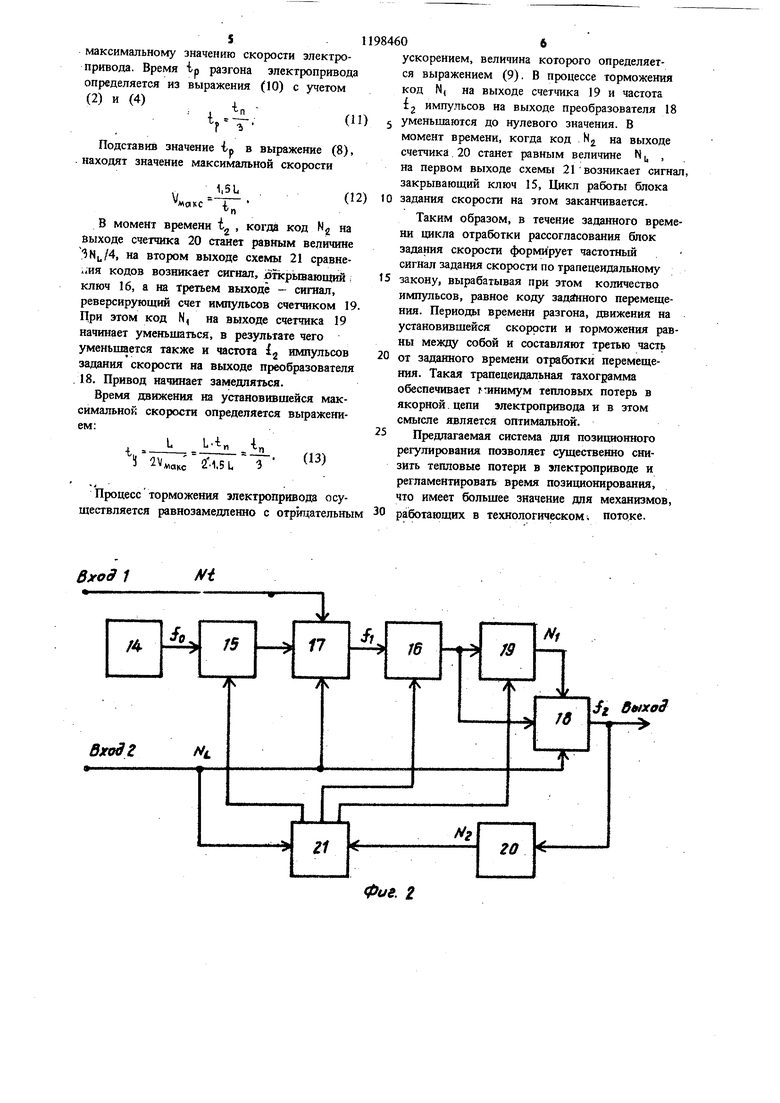
В процессе отработки заданного перемещения разгон, движение на установившейся скорости и торможение электропривода осуществляются в соответствии с величиной сигнала 4.2 задания скорости, отрабатываемого цифро вым контуром регулирования скорости. При этом количество импульсов частоты i выработанных блоком 13 задания скорости в течение заданного времени перемещения, в точности соответствует заданной величине перемещения. 2 - о контроль В конце цикла при отработки заданного перемещения осуществля ется цифровым контуром регулирования положения. В этом случае при наличии ошибки (например, из-за инерционности контура регулирования скорости, либо из-за наличия статического момента) на вход интегратора 7 через блок 5 поступают импульсы частоты i J . Код N на выходе интегратора, а следовательно, и сигнал Uj , на выходе цифроаналогового преобразователя изменяются таким образом, что устраняется рассогласоэание по пути. При достижении величиной Nm значения равного Mj рассогласование становит ся равным нулю и электропривод останавливается в заданном положении. Реализацию оптимальной по величине потер в электроприводе трапецеидальной тахограммы обеспечивает блок задания скорости, временные аграммы сигналов которого приведены на фиг. 3. Блок задания скорости работает следующим образом. В исходном состоянии счетчики 19 и 20 импульсов находятся в нулевом состоянии, код заданного времени N -перемещения и код Иц заданного перемещения, поступающие соответственно на первый и второй входы блока, равны нулю, на выходах преобразователей частоты сигналы равны нулю, ключи 15 и 16 открыты. Введенные в блок 1 задгшия перемещения и в блок 12 задания времени перемещения . коды Нц и N.J. подаются соответственно на второй и первый входы блока 13. На частот rfbrii вход преобразователя 17 частоты через ключ 15 подается сигнал f (, с выхода генератора 14 эталонной частоты. На выходе преобразователя 17 частота следования им-,. пульсов определяется выражением: Mt °:
где
сЗ
Т-t
Схема 21 сравнения кодов производит сравнение кода К J,С кодом заданного перемещения Н. В момент времени t,, когда код Ng 55 достигает величины И(.М, на втором выходе схемь 21 возникает сигнал, закрывающий ключ 16. При этом в счетчике 19 фиксируется некоторый код Ни . соответствующий 0- где (j. - принятая дискретность задания времени перемещения (цена импульса генератора 14 талонной частоты); dj - принятая дискретность задания и измерения величины перемещения (цена импульсов на выходе формирователя 6); Ь - зада1шая величина перемещения; i - заданное время перемещения. С выхода преобразователя частоты 17 импульсы i( поступают через ключ 16 на частотный вход счетчика 19, на выходе которого код N, изменяется во времени в соответствии с выражением: 1 ri,-t . Импульсы i поступают также на частотный вход преобразователя 18 частоты, на выходе которого частота i следования импульсов определяется соотнощением : , XN, ta-tiX которое с учетом (I) и (5) имеет вид: 4.5N, i. где k - 4,5- постоянный коэффициент. Пренебрегая динамической ощибкой в скорости при разгоне электропривода можно записать, что где V - скорость движения электропривода. С учетом (2)-(4) и (7) выражение (6) принимает вид: V--T-i(8) и соответствует равноускоренному движению с ускорением Импульсы частоты i подаются на вход четчика 20, на выходе которого код N,j зменяется во времени в соответствии с выражениемt.р„(10) Niji. максимальному значению скорости электропривода. Время ip разгона электропривода определяется из выражения (10) с учетом (2) и (4) Подставив значение ip в выражение (8), находят значение максимальной скорости В момент времени tg , когда код N на выходе счетчика 20 станет равным величине 3Ni./4, иа втором выходе схемы 21 сравне..ия кодов возникает сигнал, рткрьтающий : ключ 16, а на третьем выходе - сигнал, реверсирующий счет импульсов счетчиком 19 При этом код N, на выходе счетчика 19 начинает уменьшаться, в результате чего уменьшается также и частота iy, импульсов задания скорости на выходе преобразователя .18. Привод начинает замедляться. Время движения на установившейся максимальной скорости определяется выражением:I. L.-t« 4 Процессторможения электропривода осуществляется равнозамедленно с отрицательным
f/i
Вжод
фиг, 2 0 ускорением, величина которого определяется выражением (9). В процессе торможения код N, на выходе счетчика 19 и частота 12 импульсов на выходе преобразователя 18 уменьшаются до нулевого значения. В момент времени, когда код Н на выходе счетчика. 20 станет равным величине N , на первом выходе схемы 21 возникает сигнал, закрывающий ключ 15, Цикл работы блока задания скорости на этом заканчивается. Таким образом, в течение заданного времени цикла отработки рассогласования блок задания скорости формирует частотный сигнал задания скорости по трапецеидальному закону, вырабатывая при этом количество импульсов, равное коду задгГнного перемещения. Периоды времени разгона, движения на установившейся скорости и торможения равны между собой и составляют третью часть от заданного времени отработки перемещения. Такая трапецеидальная тахограмма обеспечивает гтинимум тепловых потерь в якорной цепи электропривода к в этом смысле является оптимальной. Предлагаемая система для позиционного регулирования позволяет существенно снизить тепловые потерн в электроприводе и регламентировать время позиционирования, что имеет большее значение для механизмов. „... „„„„„.. работающих в технологическом, потоке
f А
г.
Ny
tp
iy ii
Фие. 3
| Устройство для позиционного управления электроприводом постоянного тока | 1981 |
|
SU1003286A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровая система для позиционногоРЕгулиРОВАНия | 1979 |
|
SU824147A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
