Изобретение касается автоматического управления и регулирования электропривода постоянного тока и предназначено для точной отработки рабочим органом заданного перемещения в течение заданного времени.
Цель изобретения - повышение быстродействия при минимальных тепловых потерях в электроприводе.
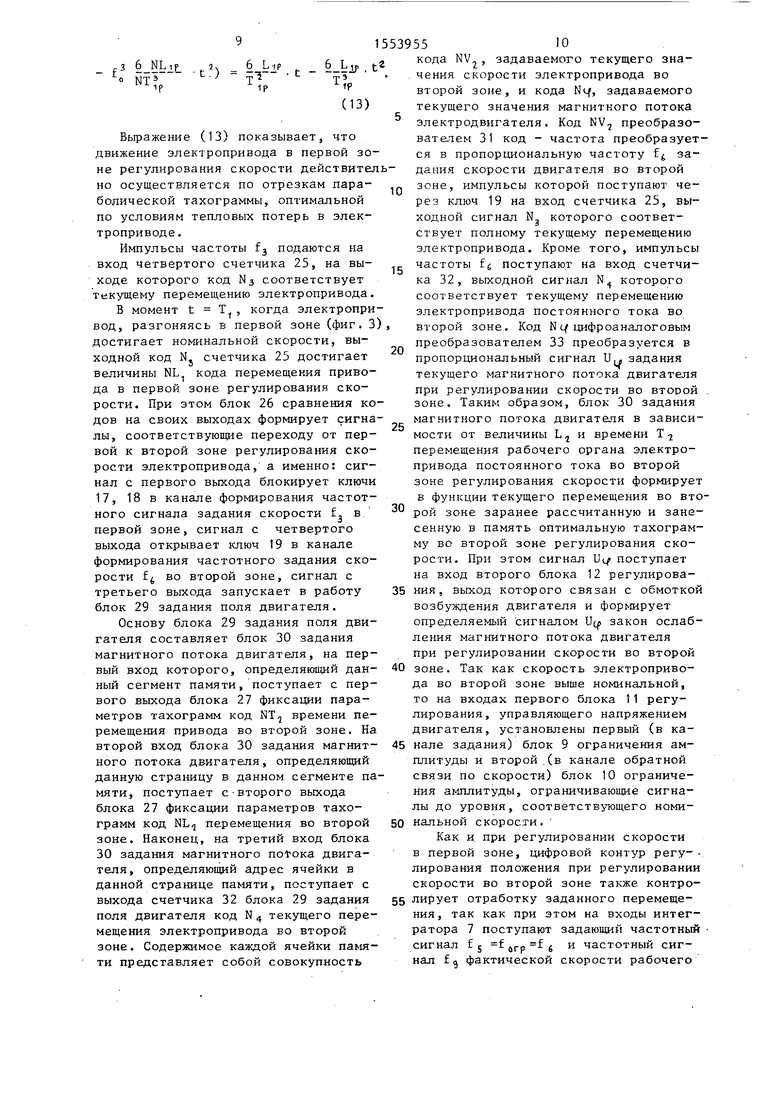
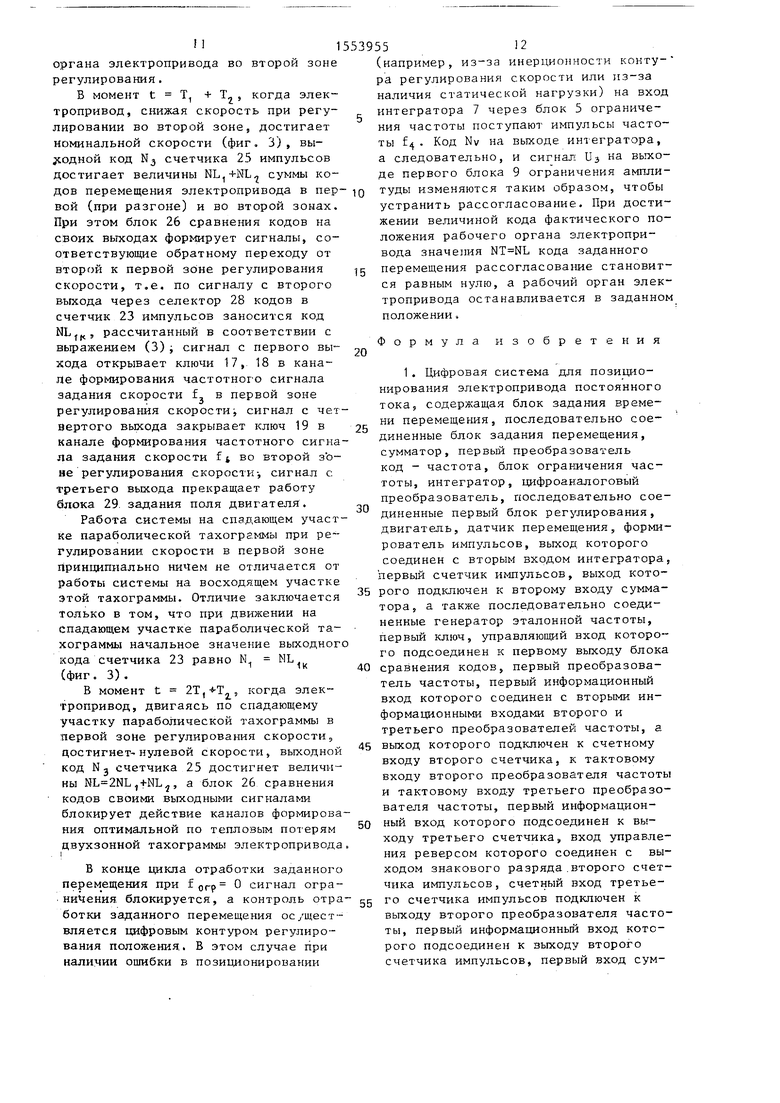
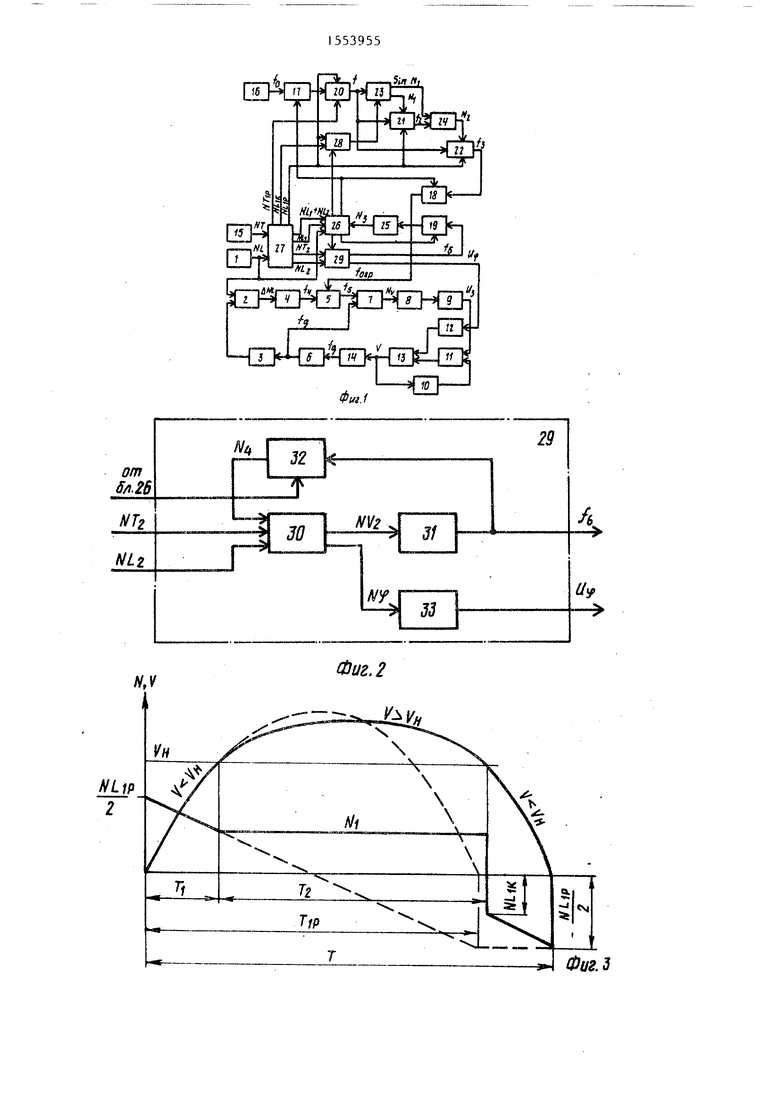
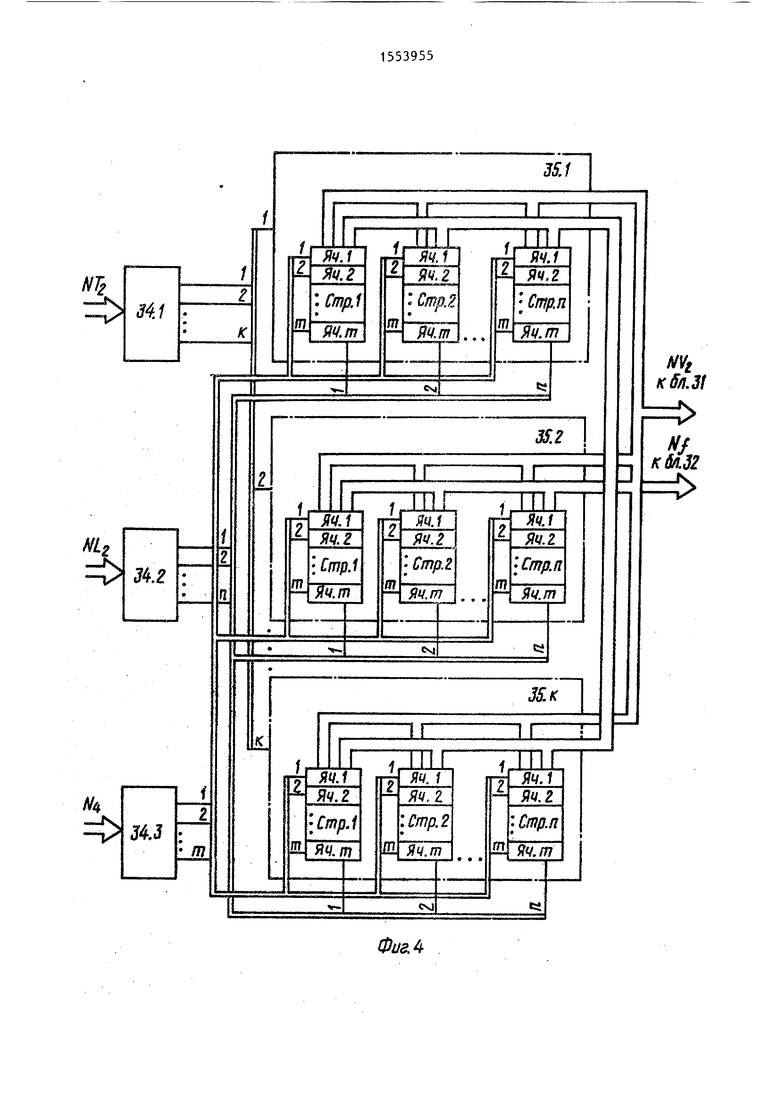
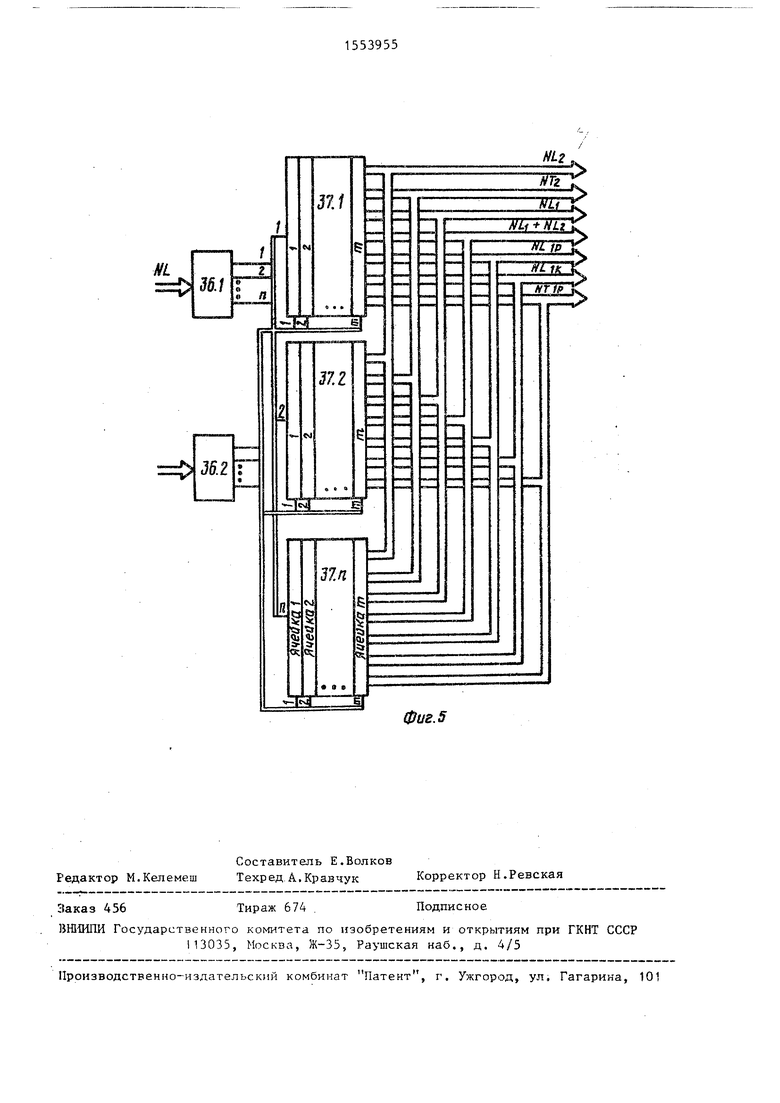
На фиг. 1 приведена функциональная схема предлагаемой системы, на фиг. 2 - то же, блока задания поля двигателя} на фиг. 3 - временные диаграммы основных параметров системы} на фиг. 4 - структура элемента программируемой памяти, на фиг. 5 - структура блока фиксации параметров тахограмм.
Цифровая система содержит блок 1 задания перемещения, сумматор 2, первый счетчик 3 импульсов, преобразователь 4 код - частота, блок 5 ограни-, чения частоты, формирователь 6 импульсов, интегратор 7, цифроаналоговый преобразователь 8, первый и второй блоки 9 и 10 ограничения амплитуды, первый и второй блоки 11 и 12 регулирования, электропривод 13 постоянного тока (двигатель), импульсный датчик 14 перемещения, блок 15 задания време сл
СЛ СО
со
01 СЛ
ни перемещения, генератор 16 эталонной частоты, первый, второй и третий ключи 17-19, первый, второй и третий преобразователи 20-22 частоты, второй, третий и четвертый счетчики 23-25 импульсов, блок 26 сравнения кодов, блок П фиксации параметров тахограмм, селектор 28 кодов, блок 29 задания поля двигателя. В свою очередь, блок 29 задания поля двигателя содержит соединенные последовательно блок 30 зада ния магнитного потока двигателя, преобразователь 31 код - частота и счетчик 32, а также цифроаналоговый пре- образователь 33.
В состав элемента 30 программируемой памяти входят дешифраторы 34,1- 34.3, а также k сегментов 35,1-35.k памяти. В состав блока 27 фиксации параметров тахограмм входят дешифрато ры 36.1 и 36,2 и элементы 37.1-37.ri памяти„
Блоки 16-18, 20-28 участвуют в формировании задания скорости электропри вода в первой зоне, т.е. по каналу регулирования напряжения Блоки 19S 25-275 29 участвуют в формировании задания скорости электропривода во второй зоне, т.е. по каналу регулирования поля электропривода постоянного тгока.
Цифровая система для позиционирования электропривода постоянного тока работает следующим образом,
В исходном состоянии на выходе блока 1 задания перемещения код NL заданного положения равен нулю, все счетчики импульсов и интегратор 7 находятся в нулевом состоянии, сигнал 1) на втором выходе блока 29 зада- кия поля двигателя соответствует номинальному потоку двигателя, сигнал задания скорости U 3 на выходе первого блока 9 ограничения амплитуды равен нулю и электропривод 13 посто- янного тока находится в состоянии покоя.
Введенный в блок 1 задания перемещения код NL заданного положения подается на первый вход сумматора 2. На выходе сумматора возникает код рассогласования UNL, который подается на вход преобразователя 4 код - частота. На выходе преобразователя 4 имеющего линейную характеристику, В0 никают импульсы, следующие с частотой Ј4, величина которой пропорциональна коду рассогласования ДКЬ. Импульсы частоты поступают на первый вход
0
Q
г
35 40 45
50 55
0
блока 5 ограничения частоты. На выходе блока 5 возникают импульсы, частота fj следования которых равна частоте f0rP импульсов, поступающих на его второй вход с выхода второго ключа 18, Вырабатываемые блоком 5 импульсы суммируются в интеграторе 7, выходная величина N которого преобразуется цифроаналоговым преобразователем 8 в напряжение задания скорости Uj, которое через первый блок 9 ограничения амплитуды подается на первый вход первого блока 11 регулирования, управляющего напряжением электропривода 13. При этом электропривод начинает разгоняться, импульсный датчик 14 перемещения начинает выдавать импульсы, частота fq следования которых пропорциональна скорости перемещения рабочего органа электропривода. Эти импульсы через формирователь 6 импульсов подаются на второй вход интегратора 7 и являются сигналом обратной связи в цифровом контуре регулирования скорости. С выхода формирователя 6 импульсы подаются также на вход счетчика 3 импульсов, производящего их суммирование. На выходе счетчика 3 код представляет собой фактическое положение рабочего органа электропривода и является сигналом обратной связи в цифровом контуре регулирования положения.
В процессе отработки заданного перемещения разгон и торможение электропривода 13 постоянного тока осуществляется в соответствии с величиной сигнала f огр заданной скорости, отрабатываемого в первой зоне (по каналу управления напряжением двигателя) , либо во второй зоне (по каналу управления полем двигателя) цифровым контуром регулирования скорости, при этом суммарное число импульсов частоты Јогр в точности соответствует коду Ж, заданного перемещения.
В данной системе реализуется оптимальный, соответствующий минимуму тепловых потерь в электроприводе закон изменения скорости. Причем с целью повышения быстродействия при отработке средних и больших перемещений осуществляется двухзонное управление электроприводом постоянного тока с минимизацией суммарных тепловых потерь в обеих зонах регулирования скорости: до номинальной скорости - ( путем регулирования напряжения, подаваемого на двигатель, а выше номи515
мальной скорости - путем регулирования магнитного потока двигателя. Каждому заданному перемещению L (его код NL) за заданное время Т (его код NT) соответствует единственная, оптимальная по сумме потерь в обеих зонах тахограмма. В соответствии с этой тахограммой электропривод постоянного тока осуществляет два равных переме-
щения Ц за время Т1 (при разгоне и торможении) в первой зоне и перемещение L2 за время Т2 во второй зоне (фиг. 3). Параметры этой оптимальной .тахограммы формируются в блоке 27 фик сации параметров тахограмм, который представляет собой элемент программируемой памяти, каждая страница которого определяется кодом заданного перемещения NL, адрес ячейки в каждой странице определяется кодом NT заданного времени перемещения, а содержимое каждой ячейки памяти представляет собой следующую совокупность параметров тахограммы для первой и второй зон регулирования скорости электропривода :
NL1 - код перемещения в первой зоне (как при разгоне, так и при торможении), третий выход блока 27j
NTt - код времени перемещения в первой зоне (как при разгоне, так и при торможении),
NL - код перемещения во второй зоне, второй выход блока 27;
№Г.г - код времени перемещения во
второй зоне, первый выход блока 27;
i
NL,+NL - суммарный код перемещения при разгоне в первой зоне и пере- мещения во второй зоне, четвертый выход блока 27.
В предлагаемой системе движение электропривода в первой зоне осуществляется по оптимальной параболической тахограмме. Однако при двухзонном регулировании скорости движение в первой зоне производится не по всей отмеченной параболе (пунктирная линия на фиг. 3), а лишь по двум ее частям: при нарастании скорости до номинальной VM и при снижении скорости ниже номинальной VH после окончания регулирования скорости во второй зоне. Параметры отмеченной (расширенной) параболической тахограммы определяются величинами кодов перемещений и времени перемещений в первой зоне регулирования :
ЧР
NL
(О
ЧР
NT, МТ,
(2)
2-NL,
которые формируются соответственно на пятом и седьмом выходах блока 27 фиксации параметров тахограмм и используются при формировании частей оптимальной параболической тахограммы в первой зоне регулирования скорости электропривода.
На шестом выходе блока 27 фиксации параметров тахограмм формируется код NL, в соответствии с выражением
- NL
чр 2-Т
(3)
Р
который заносится в счетчик 23 импульсов в момент обратного перехода регулирования скорости электропривода от второй зоны к первой.
Параметры NLip, NT 1f), NL fK также входят в совокупность содержимого соответствующей ячейки памяти.
Реализация оптимальной параболической тахограммы в первой зоне регулирования скорости производится следующим образом.
В исходном состоянии счетчики 23-25 импульсов находятся в нулевом положении, код NT заданного времени перемещения и код NL заданного пере-- мещения равны нулю, сигналы на выходах преобразователей 20, 21 и 22 частоты также равны нулю, ключ 17 закрыт .
Введение в блок 1 задания перемещения и в блок 15 задания времени перемещения соответственно кодов NL и NT начинает цикл отработки электроприводом заданного перемещения. Коды NL и NT подаются соответственно на первые входы блока 27 фиксации параметров тахограмм и блока 26 сравнения кодов и на второй вход блока 27 фиксации параметров тахограмм. При этом по установочному входу в счетчик 23 импульсов через селектор 28 кодов заносится величина NL,p/2, a на частотный вход первого преобразователя 20 частоты через ключ 17 начис выхода генератора 16 эталонной частоты. На выходе преобразователя 20 частота следования импульсов определяется выражением
fikiz.
NT
И11Р
(A)
котором
NL
NT
1р
1Р
1
з;
Li d
TIP
(5)
(6)
(7)
10
15
где dr - принятая дискретность задания времени перемещения, т.е. цена импульса генератора 16 эталонной частоты, d, - принятая дискретность задаW
ния перемещения, т.е. цена импульса на выходе датчика 14 импульсов.
С выхода первого преобразователя 20 частоты импульсы частоты f, со
поступают на частотны
минус
знаком
вход счетчика 23, изменяя его выходной код в соответствии с выражением
MLtf
f r ° NT1P
(8)
Обозначение N1 на фиг. 3 относится к графику, изображенному сплошной ломаной линией с точками излома в моменты Т1 и Т1 + Т. Эта линия графически отражает содержимое счетчика 23 в цикле работы устройства. На отрезке времени от нуля до Тг линия N.J описывается уравнением (8) . На отрезке времени от Т1 до Т( + Тг содержимое счетчика 23 не изменяется, так как закрыт ключ 17. В момент времени Т, + TI в счетчик 23 вводится код NL 1)(, а ключ 17 открывается и на отрезке времени от Т, + Т г до Т содержимое счетчика описывается уравнением
NL
1k
f 5iLlp t«NTtNiip
(8.1)
Импульсы f, поступают также на частотный вход второго преобразовате ля 21 частоты, на выходе которого частота f следования импульсов опре деляется соотношением
55
- If;
f f .
1 Го 9
NLjp
- f Г° NT t
(9)
ip
где К 12 - постоянный коэффициент. При этом знак частотного сигнала f-г определяется знаком N, кода счетчика 23, т.е. в период разгона привода в первой зоне при положительном N., импульсы частоты f суммируются в третьем счетчике 24, а при торможении привода в первой зоне отрицательное
N,
NL
1k
(введенное по за
вершении регулирования во второй зоне в счетчик 23 импульсов через селектор 28 кодов с шестого выхода блока 27 фиксации параметров тахограмм) реверсирует счет импульсов в третьем счетчике 24 импульсов. Таким образом, выходной сигнал N третьего счетчика 24 определяется выражением
i
N,
t f I ,
На выходе преобразователя 22 частота Јэ следования импульсов определяется выражением
f (t) f f Tl(-t) r NT..-Г
IP
6 NL 1E
NT f
t - f
3 0
(11)
Пренебрегая динамической ошибкой в скорости, при движении электропривода можно записать для случая регулирования скорости в первой зоне
ОГр
f -- 3 dt
(12)
где V - скорость перемещения рабочего
органа привода.
Из соотношения (12) с /четом выражений (5), (6), (7) и (11) уравнение скорости перемещения рабочего органа принимает вид
с J 1( /iri
- fi dL --- .(f
6.-NL.LP
О pJT
Ni 1p
t
t2)
1553955 6 Lip , . t2
ко че вт те эл ва ся да зо ре хо ст эл ча ка со эл вт пр пр те
(13)
Выражение (13) показывает, что движение электропривода в первой зоне регулирования скорости действительно осуществляется по отрезкам параболической тахограммы, оптимальной по условиям тепловых потерь в электроприводе.
Импульсы частоты f3 подаются на вход четвертого счетчика 25, на выходе которого код N3 соответствует текущему перемещению электропривода.
В момент t Т;, когда электропривод, разгоняясь в первой зоне (фиг. 3) достигает номинальной скорости, выходной код Н5 счетчика 25 достигает величины NL1 кода перемещения привода в первой зоне регулирования скорости. При этом блок 26 сравнения кодов на своих выходах формирует сигна
5
0
0
5
10
кода NV, задаваемого текущего значения скорости электропривода во второй зоне, и кода Ncf, задаваемого текущего значения магнитного потока электродвигателя. Код NV2 преобразователем 31 код - частота преобразуется в пропорциональную частоту f задания скорости двигателя во второй зоне, импульсы которой поступают через ключ 19 на вход счетчика 25, выходной сигнал N3 которого соответствует полному текущему перемещению электропривода. Кроме того, импульсы частоты ff поступают на вход счетчика 32, выходной сигнал М которого соответствует текущему перемещению электропривода постоянного тока во второй зоне. Код Nc/цифроаналоговым преобразователем 33 преобразуется в пропорциональный сигнал U,., задания текущего магнитного потока двигателя
при регулировании скорости во второй зоне. Таким образом, блок 30 задания магнитного потока двигателя в зависимости от величины L, и времени Т
| название | год | авторы | номер документа |
|---|---|---|---|
| Система позиционирования электропривода с энергетической оптимизацией при двухзонном регулировании скорости | 1991 |
|
SU1820361A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Цифровая система для позиционного регулирования | 1985 |
|
SU1280572A1 |
| Цифровая система для позиционного регулирования | 1984 |
|
SU1198460A1 |
| Цифровая система для позиционногоРЕгулиРОВАНия | 1979 |
|
SU824147A1 |
| Система управления приводом летучих ножниц | 1984 |
|
SU1260121A1 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| Система управления приводом летучих ножниц | 1987 |
|
SU1523269A1 |
| Устройство для программного управления | 1981 |
|
SU960740A2 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2017 |
|
RU2658678C1 |
Изобретение относится к технике автоматического управления и регулирования электропривода постоянного тока и предназначено для точной обработки рабочим органом заданного перемещения в течение заданного времени. Целью изобретения является повышение быстродействия при минимальных тепловых потерях в электроприводе. Цифровая система содержит блок задания перемещения, сумматор, счетчики импульсов, преобразователь код-частота, блок ограничения частоты, формирователь импульсов, интегратор, цифроаналоговый преобразователь, блоки ограничения амплитуды, блоки регулирования, электропривод постоянного тока (двигатель), импульсный датчик перемещения, блок задания времени перемещения, генератор эталонной частоты, ключи, преобразователи частоты, блок сравнения кодов, блок фиксации параметров тахограмм, селектор кодов, блок задания поля двигателя. 1 з.п. ф-лы, 5 ил.
вой к второй зоне регулирования скорости электропривода, а именно: сигнал с первого выхода блокирует ключи 17, 18 в канале формирования частотного сигнала задания скорости f, в первой зоне, сигнал с четвертого выхода открывает ключ 19 в канале формирования частотного задания скорости f во второй зоне, сигнал с третьего выхода запускает в работу блок 29 задания поля двигателя.
Основу блока 29 задания поля двигателя составляет блок 30 задания магнитного потока двигателя, на первый вход которого, определяющий данный сегмент памяти, поступает с первого выхода блока 27 фиксации параметров тахограмм код NT времени перемещения привода во второй зоне. На второй вход блока 30 задания магнитного потока двигателя, определяющий данную страницу в данном сегменте памяти, поступает с второго выхода блока 27 фиксации параметров тахограмм код NLa перемещения во второй зоне. Наконец, на третий вход блока 30 задания магнитного потока двигателя, определяющий адрес ячейки в данной странице памяти, поступает с выхода счетчика 32 блока 29 задания поля двигателя код N 4 текущего перемещения электропривода во второй зоне. Содержимое каждой ячейки памяти представляет собой совокупность
0
перемещения рабочего органа электропривода постоянного тока во второй зоне регулирования скорости формирует в функции текущего перемещения во второй зоне заранее рассчитанную и занесенную в память оптимальную тахограм- му во второй зоне регулирования скорости. При этом сигнал Ug поступает на вход второго блока 12 регулирова5 ния, выход которого связан с обмоткой возбуждения двигателя и формирует определяемый сигналом Ify закон ослабления магнитного потока двигателя при регулировании скорости во второй
0 зоне. Так как скорость электропривода во второй зоне выше номинальной, то на входах первого блока 11 регулирования, управляющего напряжением двигателя, установлены первый (в ка5 нале задания) блок 9 ограничения амплитуды и второй (в канале обратной связи по скорости) блок 10 ограничения амплитуды, ограничивающие сигналы до уровня, соответствующего номи0 нальной скорости.
Как и при регулировании скорости в первой зоне, цифровой контур регу- - лирования положения при регулировании скорости во второй зоне также контро5 лирует отработку заданного перемещения, так как при этом на входы интегратора 7 поступают задающий частотный сигнал fs farp ft и частотный сигнал fa фактической скорости рабочего
11
ргана электропривода во второй зоне егулирования.
1553955
(на ра нал ин ни ты а де ту ус же ло во пе ся тр по
В момент t Т, + Т„
когда
элек
е. тропривод, снижая скорость при регулировании во второй зоне, достигает
номинальной скорости (фиг. 3), выходной код М3 счетчика 25 импульсов достигает величины NL,+NL суммы кодов перемещения электропривода в пер вой (при разгоне) и во второй зонах. При этом блок 26 сравнения кодов на своих выходах формирует сигналы, соответствующие обратному переходу от второй к первой зоне регулирования скорости, т.е. по сигналу с второго выхода через селектор 28 кодов в счетчик 23 импульсов заносится код NLf(t, рассчитанный в соответствии с выражением (3); сигнал с первого выхода открывает ключи 17, 18 в канапе формирования частотного сигнала задания скорости f в первой зоне регулирования скорости-, сигнал с четвертого выхода закрывает ключ 19 в канале формирования частотного сигнала задания скорости f во второй зоне регулирования скорости-, сигнал с третьего выхода прекращает работу блока 29. задания поля двигателя.
Работа системы на спадающем участке параболической тахогргммы при регулировании скорости в первой зоне принципиально ничем не отличается от работы системы на восходящем участке Этой тахограммы. Отличие заключается Только в том, что при движении на Спадающем участке параболической тахограммы начальное значение выходног
23 равно N, ML
1к
2Т,+Т
когда электропривод, двигаясь по спадающему участку параболической тахограммы в первой зоне регулирования скорости, достигнет-нулевой скорости, выходной код Ng счетчика 25 достигнет величины NL 2NL1tNL, а блок 26 сравнения кодов своими выходными сигналами блокирует действие каналов формирования оптимальной по тепловым потерям
цвухзонной тахограммы электропривода.
i
В конце цикла отработки заданного перемещения при fогр 0 сигнал ограничения блокируется, а контроль отработки заданного перемещения осуществляется цифровым контуром регулирования положения. В этом случае при наличии ошибки в позиционировании
12
5
0
5
0
5
0
5
0
5
(например, из-за инерционности кокту- ра регулирования скорости или из-за наличия статической нагрузки) на вход интегратора 7 через блок 5 ограничения частоты поступают импульсы частоты Ј4- Код NV на выходе интегратора, а следовательно, и сигнал; Ъ з на выходе первого блока 9 ограничения амплитуды изменяются таким образом, чтобы устранить рассогласование. При дости жении величиной кода фактического положения рабочего органа электропривода значения кода заданного перемещения рассогласование становится равным нулю, а рабочий орган электропривода останавливается в заданном положении.
Формула изобретения
матора соединен с первым уставоч- - ным входом блока сравнения кодов, информационный вход которого подсоединен к выходу четвертого счетчика импульсов, счетный БХ.ОД которого подключен к второму входу блока ограничения частоты, отличающа - я с я тем, что, с целью повышения быстродействия при минимальных тепло- вых потерях в электроприводе, в нее дополнительно введены блок фиксации параметров тахограмм, блок задания поля двигателя, второй блок регулирования, первый и второй блоки ограни- чения амплитуды, второй и третий ключи и селектор кодов, причем выход блока задания перемещения соединен с первым входом блока фиксации параметров тахограмм, второй вход которого подсоединен к выходу блока задания времени перемещения, первый и второй выходы блока фиксации параметров тахограмм подключены соответственно к первому и второму входам блока задания поля двигателя, второй выход которого соединен с входом второго блока регулирования, выход которого подсоединен к второму входу двигателя, выход которого подключен к входу второго блока ограничения амплитуды, выход которого соединен с вторым входом первого блока регулирования, первый вход которого подсоединен к выходу первого блока ограничения амплитуды, вход которого подключен к выходу цифроаналогового преобразователя, третий и четвертый выходы блока фиксации параметров тахограмм соединены соответственно с вторым и третьим уставочными, входами блока сравнения кодов, третий выход которого подсоединен к третьему входу блока задания поля двигателя, первый выход которого подключен к входу третьего
0
g
5
0
5
0
ключа, управляющий вход которого соединен с четвертым выходом блока сравнения кодов, выход третьего ключа подсоединен к счетному входу четвертого счетчика импульсов и к выходу второго ключа, вход которого подключен к выходу третьего преобразователя частоты, а управляющий вход которого соединен с первым выходом блока сравнения кодов, второй выход которого подсоединен к управляющему входу селектора кодов, выход которого подключен к установочному входу второго счетчика, первый вход селектора кодов соединен с первым информационным входом первого преобразователя частоты и с пятым выходом блока фиксации параметров тахограмм, седьмой выход которого подсоединен к второму информационному входу первого преобразователя частоты, а шестой выход блока фиксации параметров тахограмм подключен к второму входу селектора кодов.
Фю.1
Фиг. 2
Фаг.з
Ф1/&4
Составитель Е.Волков Редактор М.Келемеш Техред А.Кравчук Корректор Н.Ревская
Заказ 456
Тираж 674
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул, Гагарина, 101
Подписное
| Цифровая система для позиционного регулирования | 1984 |
|
SU1198460A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровая система для позиционного регулирования | 1985 |
|
SU1280572A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
