VI VI VI
ю ю
граммируемых делителей частоты 7i и 72, в интерполяторы 2 и 9 заносится необходимая геометрическая информация. С момента начала обработки текущего кадра управляющей программы импульсы X. У с выхода основного интерполятора 2 через коммутаторы 6i, 62 поступают на выход устройства (на соответствующие координатные приводы режущего инструмента). Одновременно каждый выходной импульс вычитает из координатных счетчиков 5i, 62 единицу. Если при этом какой-либо координатный счетчик 5i, 62 обнулился (заданное перемещение по данной координате достигнуто), то он, воздействуя на соответствующий коммутатор 6i или 62, переключает выходные импульсы основного интерполятора 2 на вход первого счетчика 3 (накопителя ошибки). Если оба координатных счетчика 5i, 62 обнулились, то они, воздействуя на элемент И 4, блокируют работу интерполятора 2. При этом, если содержимое первого счетчика 3 равно нулю или не произошло его переполнения, то считается, что основной интерполятор 2 отработал текущий кадр управляющей программы с заданной точностью, иначе на выходе первого счетчика 3 и схемы ИЛИ 11 возникает сигнал Ошибка, 9 ил. 1-2-7-8-9-10-11, 5-6-3-11.5-4-2, 2- 6-3.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интерполятор с самоконтролем | 1985 |
|
SU1280576A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Устройство для программного управления | 1985 |
|
SU1280571A1 |
| Устройство контроля для систем программного управления | 1990 |
|
SU1775716A1 |
| ИНТЕРПОЛЯТОР | 1970 |
|
SU272415A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для контроля программ на координатографе | 1983 |
|
SU1149219A1 |
| Система для программного управления | 1984 |
|
SU1246053A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в устройствах чистового программного управления металлорежущими станками. Цель изобретения - повышение надежности работы интерполятора за счет контроля текущих интерполяционных шагов. Устройство содержит блок задания скорости 1, основной интерполятор 2, первый счетчик 3, элемент И 4, координатный счетчик 5t-52. коммутатор 61-62. программируемый делитель частоты 7i-72, элемент ИЛИ 8, контрольный интерполятор 9, второй счетчик 10, элемент ИЛИ 11. Перед началом обработки очередного кадра управляющей программы обнуляются первый счетчик 3, второй счетчик 10, в координатные счетчики 5i, 62 заносится заданная величина приращений по координатам в соответствии с заданной подачей, блок задания скорости 1 устанавливает коэффициент деления К про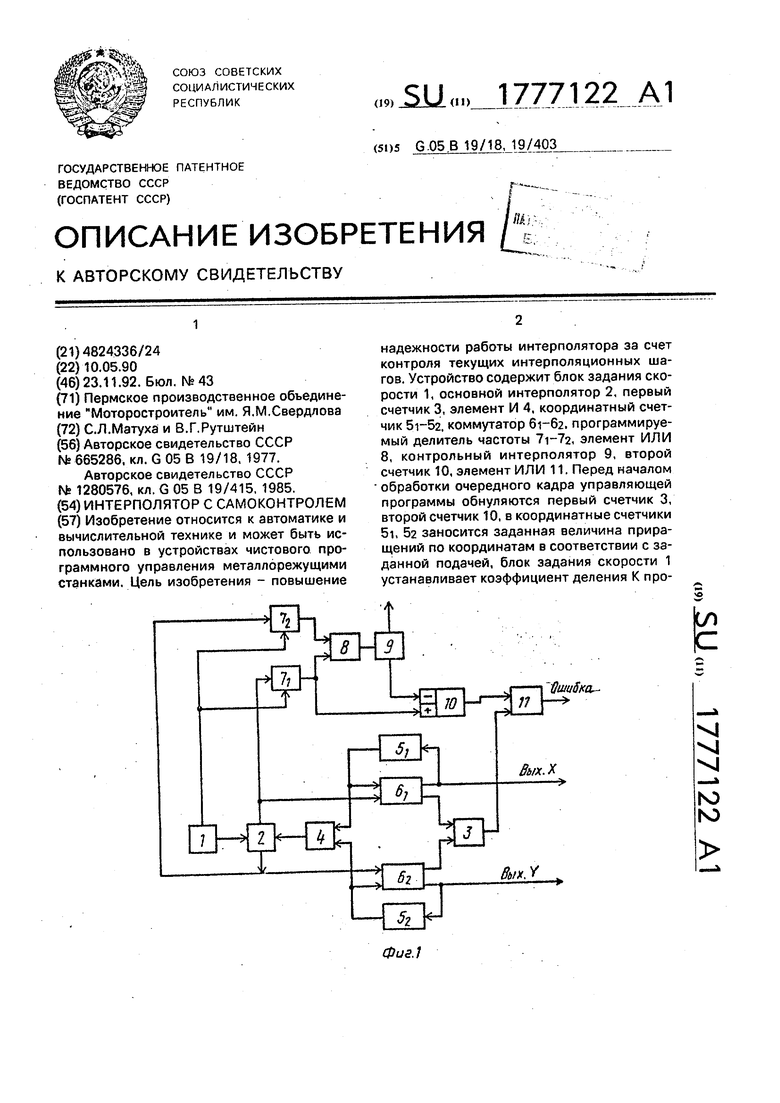
Изобретение относится к автоматике и вычислительной технике и может быть использовано в устройствах числового программного управления металлорежущими станками.
Известно устройство (а.с. № 665286, кл. G 05 В 19/18.1977), содержащее блок задания скорости, соединенный с интерполятором, имеющим два выхода, которые соединены с счетчиком суммарных приращений по координатам основного контура Ах, Ду и с последовательно включенными умножителями и делителями
Недостатком данного устройства является отсутствие контроля прихода в конечную точку по координатам в конце отрабатывания кадра управляющей программы. Это объясняется тем, что, если при нарушении правильной работы интерполятора прекратилась выдача выходных импульсов интерполятором по одной из координат, то эти недостающие импульсы компенсируются в счетчике импульсами другой координаты. Кроме того, основным недостатком является отсутствие контроля фактической траектории, образуемой интерполятором относительно заданной интерполятору в процессе отработки кадра управляющей программы.
Наиболее близким техническим решением к заявляемому является устройство, (а,с. № 1280576, кл. G 05 В 19/415, 1985). содержащее блок задания скорости, интерполятор, первый счетчик импульсов, два координатных счетчика импульсов, два коммутатора, схему И, выход которой подключен к второму входу интерполятора, имеющему также частотный вход, подключенный к выходу блока задания, скорости и
два выхода для выдачи импульсов по координатам X, Y, каждый из которых скоммути- рован с первым входом соответствующего коммутатора, вторые входы которых подключены к соответствующим входам схемы
И и выходам координатных счетчиков,
входы которых скоммутированы с первыми
выходами коммутаторов, имеющими также
вторые выходы, подключенные к соответствующим входам первого счетчика.
Недостатком известного устройства является то, что сигнал Ошибка может возникнуть только в конце отработки кадра управляющей программы, т.е. контролируется конечная точка позиционирования, а не траектория движения во время работы интерполятора с немедленной выдачей ошибки при отклонении фактической траектории от заданной.
Целью изобретения является повышение надежности работы интерполятора за счет контроля текущих интерполяционных шагов.
Указанная цель достигается тем, что в
интерполятор с самоконтролем, содержащий блок задания скорости, первый информационный выход которого соединен с частотным входом основного интерполятора, вход блокировки которого подключен к
выходу элемента И, первый вход которого соединен с выходом первого координатного счетчика импульсов и с управляющим входом первого коммутатора, информационный вход которого соединен с первым
информационным выходом основного интерполятора, второй вход элемента И соединен с выходом второго координатного счетчика импульсов и с управляющим входом второго коммутатора, информационный вход которого соединен с вторым информационным выходом основного интерполятора, первый и второй выходы интерполятора с самоконтролем соединены со счетными входами соответствующих координатных счетчиков и соответственно с выходами первого и второго коммутаторов, вторые выходы которых подключены к первому и второму входам первого счетчика импульсов, введены первый и второй программируемые делители частоты, первый и второй элементы ИЛИ, контрольный интерполятор и второй счетчик импульсов, выход которого соединен с первым входом первого элемента ИЛИ, второй вход которого под- ключен к выходу первого счетчика импульсов, а выход - к выходу ошибка интерполятора с самоконтролем, суммирующий вход второго счетчика импульсов соединен с выходом первого программируемого делителя частоты и с первым входом второго элемента ИЛИ, выход которого соединен с информационным входом контрольного интерполятора, координатный выход которого подключен к вычитающему входу второго счетчика импульсов, входы задания коэффициентов первого и второго программируемых деталей частоты соединены с вторым выходом блока задания скорости, а информационные входы соответственно к первому и второму информационным выходам интерполятора.
Функциональная схема устройства представлена на фиг. 1, где 1 -блок задания скорости; 2 - основной интерполятор; 3 - первый счетчик; 4 - элемент И; 5i-5a - координатный счетчик; 61-62 - коммутатор; - программируемый делитель частоты; 8 - элемент ИЛИ; 9 - контрольный интерполятор; 10 - второй счетчик; 11 - элемент ИЛИ.
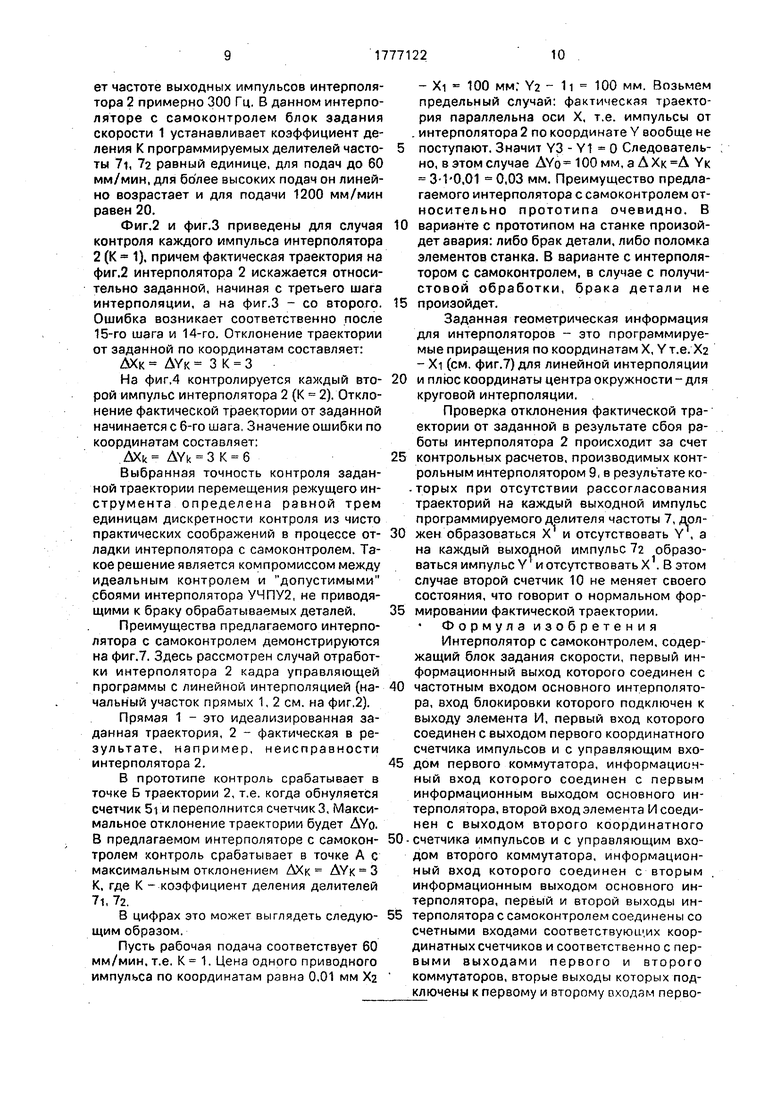
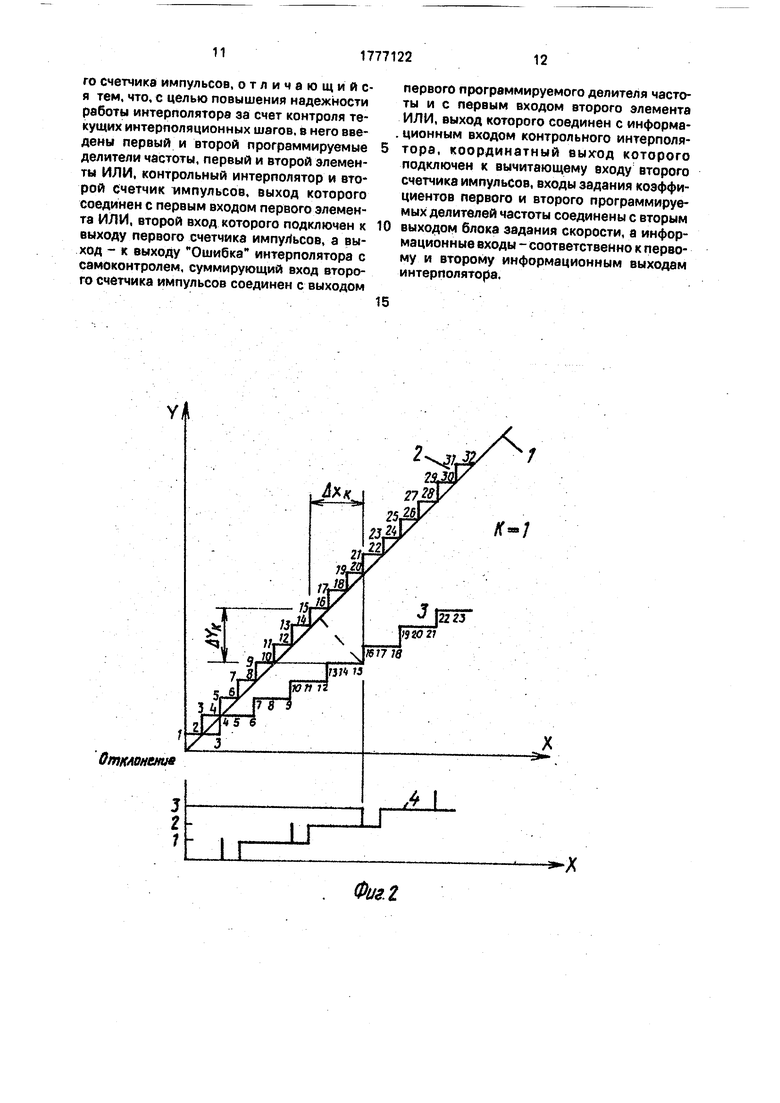
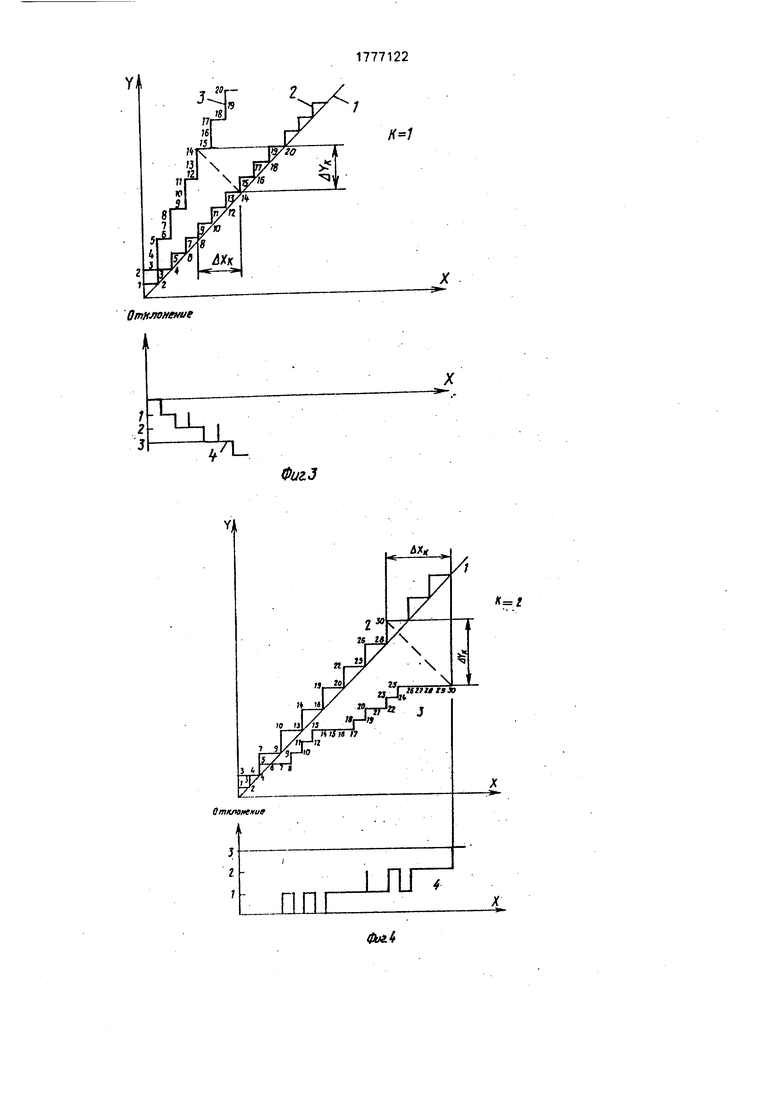
На фиг.2, 3, 4 показаны эпюры, иллюстрирующие контроль работы интерполятора 2 во время отработки текущего кадра управляющей программы для линейной интерпо- ляции, где 1 - идеализированная траектория интерполятора 2; 2 -траектория контрольного интерполятора 9; 3 - фактическая траектория интерполятора 2; 4 - отклонение фактической траектории от заданной в единицах дискретности контроля траектории (содержимое второго счетчика 10); ДХ«, ДУк ошибка рассогласования фактической траектории от заданной; К - коэффициент деления.
Цифры на эпюрах 2. 3... - шаги интерполяции, штриховая линия, параллельная горизонтальной оси на эпюрах 4,- порог срабатывания ошибки рассогласования траекторий.
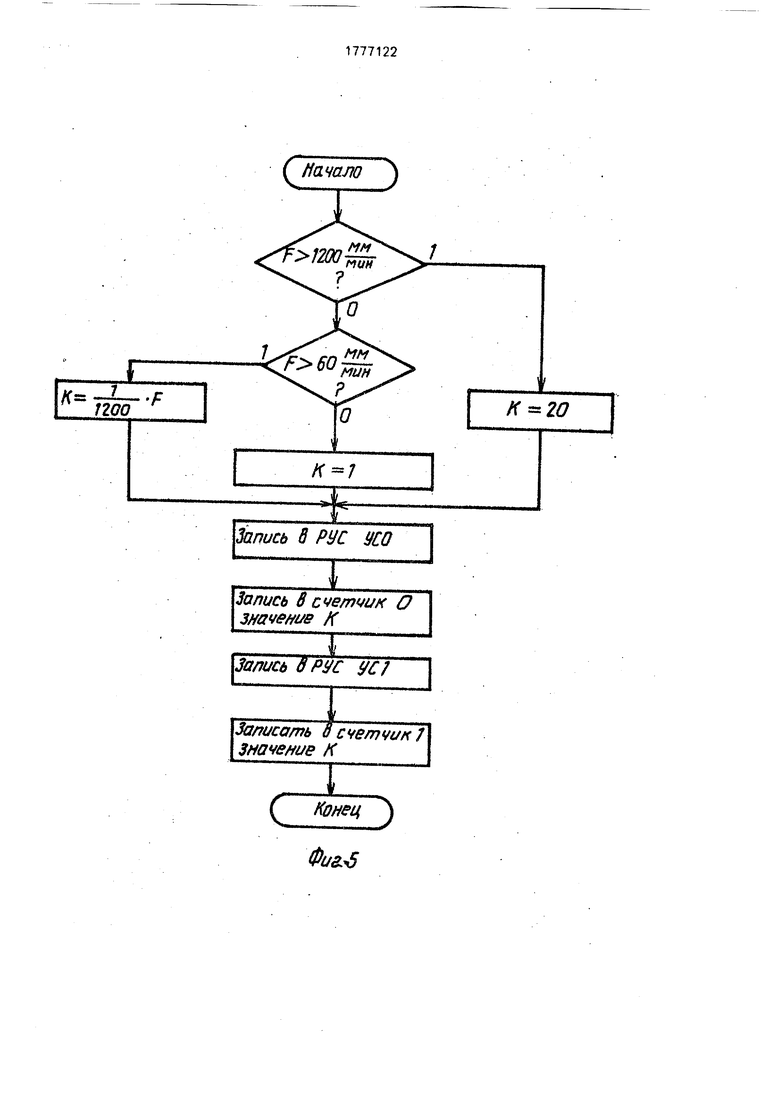
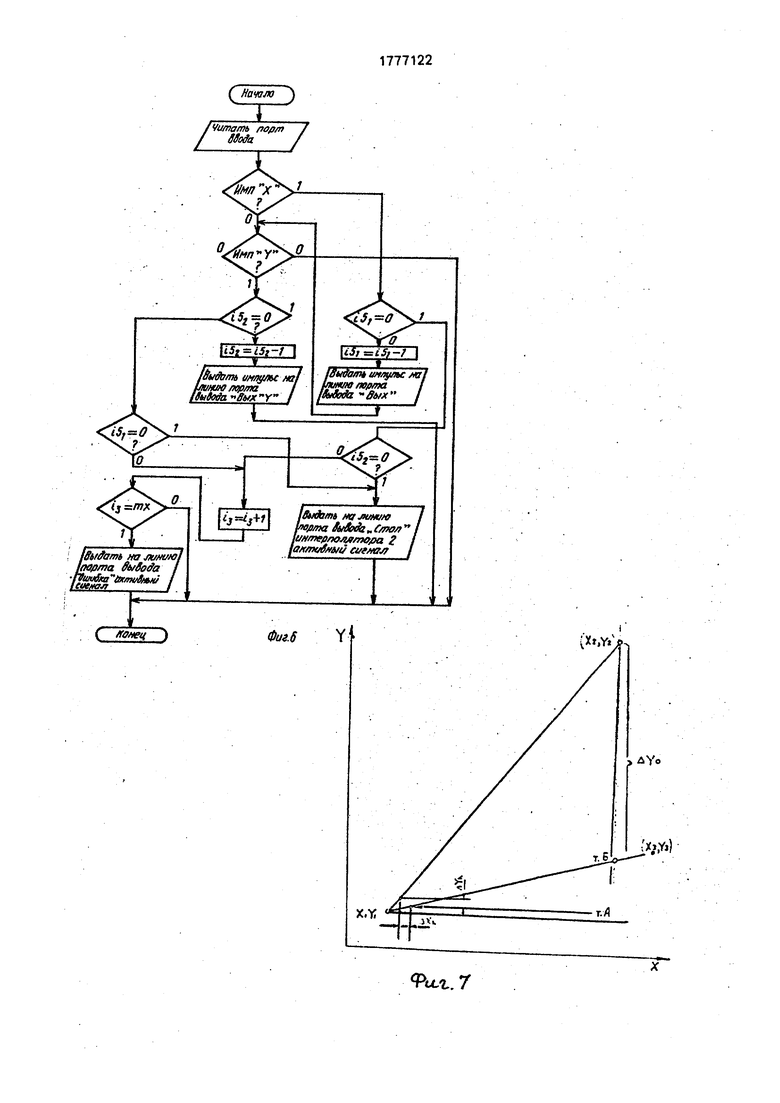
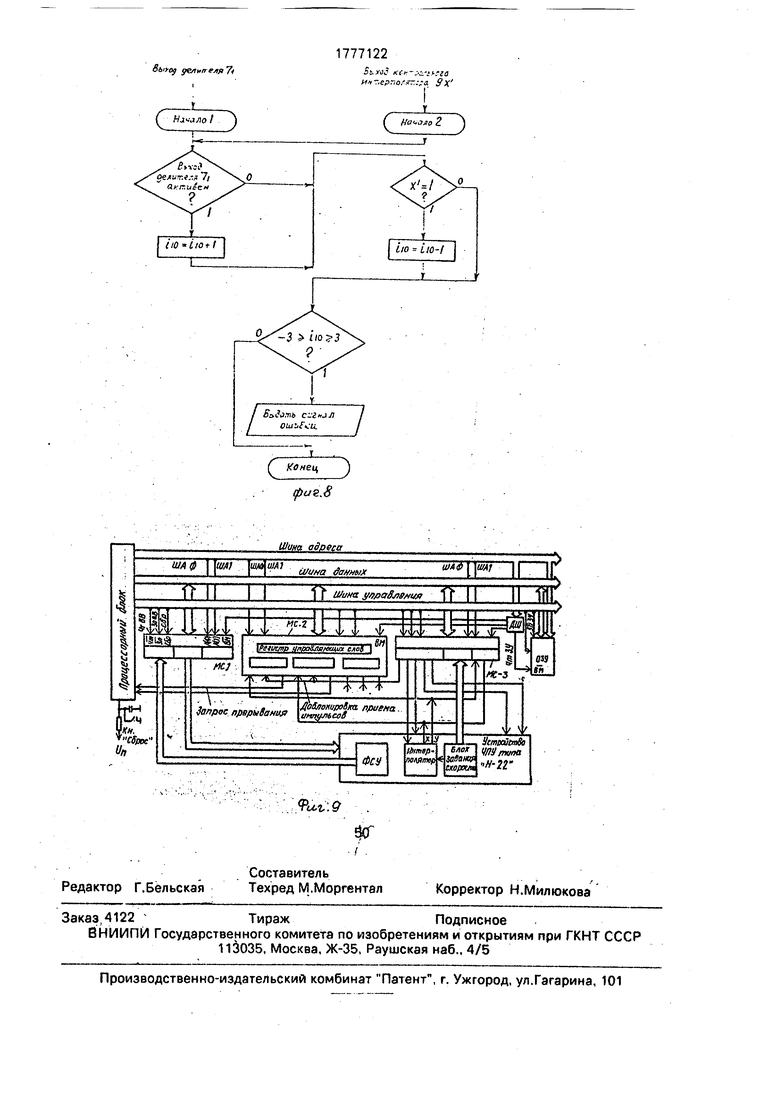
На фиг.5 - показана блок-схема алгоритма функционирования программируемых делителей частоты, устанавливающая по числовой информации, поступающей из 5 блока задания скорости, нужные коэффициенты деления, где F - кодированная числовая информация о подаче по траектории из блока задания скорости; К - рассчитанный коэффициент деления; РУС - регистр управ- 0 ляющего слова БИС КР 580 ВИ 53: УСО, 1 - управляющие слова для канала 0,1, подтверждающего режим работы канала в режиме делителя частоты и подготавливающего загрузку коэффициента деления. 5На фиг.6 представлена блок-схема алгоритма функционирования первого счетчика, координатных счетчиков и коммутаторов, где 5i, I52, 13 - содержимое соответствующих ячеек памяти ОЗУ; Мх - константа, оп- 0 ределяющая допустимую ошибку позиционирования.
На фиг.7 показан пример отработки интерполятором кадра управляющей программы с линейной интераоляцией. 5На фиг.8 представлена блок-схема алгоритма работы второго счетчика, где 10 - содержимое двух ячеек памяти ОЗУ.
На фиг.9 представлена развернутая функциональная схема технической реали- 0 зации интерполятора с самоконтролем.
Интерполятор с самоконтролем реализован как комплекс двух устройств: серийно выпускаемое устройство ЧПУ, например, типа Н22-1М и новая разработка- програм- 5 мируемый контроллер для устройств ЧПУ. Блоки 1, 2 (см, фиг. 1) - это функциональные узлы серийного устройства ЧПУ. блоки 3-11 реализованы в программируемом контроллере следующим образом: про- 0 граммируемые делители частоты 7i, 72 - это БИС КР 580 ВИ53, остальные блоки - программно-аппаратным способом на базе процессорного модуля с использованием микропроцессора КР 580 И К 80А и соответ- 5 ствующего программного обеспечения, размещенного в ППЗУ.
В программируемых делителях частоты 7i, 72 используются два канала БИС трехка- нального программируемого таймера КР 0 580 ВИ 53 с соответствующей программой обслуживания, инициирующей его работу в режиме 2, т.е. в режиме делителей частоты. Счетные входы каналов подключены к выходным импульсам интерполятора 2 (фиг.1), 5 а выходы через элемент ИЛИ 8 к аппаратуре запроса прерывания, инициирующего запуск программ контрольного интерполятора 9, а также программно-реализованного счетчика 10.
Подробное описание устройства БИС КР 580 ВИ53, его работу и временные диаграммы см. в кн: Алексеенко А.Г. и др. Проектированиерадиоэлектроннойаппаратуры на микропроцессорах.- М,: Радио и связь, 1984, с. 65.
Интерполятор 2 - основной функциональный узел устройства ЧПУ, в частности УЧПУ типа Н-22, он реализован примерно на 20 электронных платах. Контрольный интерполятор 9 реализован программно-аппаратным способом на базе микропроцессора КР 580 И К 80А по методу оценочной функции. Контрольный интерполятор 9 запускается по аппаратному прерыванию от сигналов с делителей частоты 7i, 72.
Коммутаторы 6i, 62 реализованы программно-аппаратным образом с использованием в качестве портов ввода (вывода БИС программируемого параллельного интерфейса КР 580 В В 55, на входные линии которого подключены сигналы X, .Y. а на выходные - вых.Х, вых.У.
Координатные счетчики 5i, ,62, первый счетчик 3 реализованы программным способом с использованием нескольких ячеек памяти оперативного запоминающего устройства (ОЗУ).
Второй счетчик 10 - это две ячейки памяти ОЗУ по конкретным физическим адресам, реализован аналогично первому счетчику 3. Программный блок активизируется аппаратным прерыванием по инициативе счетчика 7i и программным прерыванием X1 контрольного интерполятора 9.
Интерполятор с самоконтролем, используемый для управления металлорежущим станком в программном режиме, работает следующим образом.
Перед началом отработки очередного кадра управляющей программы обнуляются первый счетчик 3, второй счетчик 10, в координатные счетчики 5i, 62 заносится заданная величина приращений по координатам а соответствии с заданной подачей, блок задания скорости 1 устанавливает коэффициент деления К программируемых делителей частоты 7i, 7г, в интерполяторы 2 и 9 заносится необходимая геометрическая информация. С момента начала отработки текущего кадра управляющей программы импульсы X, Y с выхода интерполятора 2 через коммутаторы 6т, 62 поступают на выход устройства (на соответствующие координатные приводы режущего инструмента). Одновременно каждый выходной импульс вычитает из координатных счетчиков 5i, 62 единицу. Если при этом какой-либо координатный счетчик 5t, 82 обнулился (заданное
перемещение по данной координате достигнуто), то он, воздействуя на соответствующий коммутатор 6i или 62, переключает . выходные импульсы интерполятора 2 на
вход первого счетчика 3 (накопителя ошибки). Если оба координатных счетчика 5i, 62 обнулились. то они воздействуя на элемент И 4, блокируют работу интерполятора 2. При этом, если содержимое первого счетчика 3
0 равно нулю или не произошло его переполнения, то считается, что интерполятор 2 отработал текущий кадр управляющей программы с заданной точностью, иначе на выходе первого счетчика 3 и элемент ИЛИ
5 11 возникает сигнал Ошибка. Важно отметить, что такая ситуация возникает в конце отработки кадра,
Контроль правильности работы основного интерполятора 2, т.е. заданной траектории
0 перемещения режущего инструмента, в процессе обработки текущего кадра управляющей программы происходит следующим образом.
Выходные импульсы X, Y интерполято5 ра 2 поступают на контрольный интерполятор 9 через программируемые делители частоты 7i, 2 и элемент ИЛИ 8.
Таким образом на каждый к-й (см. фиг.5) импульс интерполятора 2 осуществляется
0 очередной шаг контрольной интерполяции, причем второй счетчик 10 фиксирует это следующим образом: при правильной работе интерполятора 2 на каждый импульс с программируемого делителя частоты 7i или
5 72 должен последовать соответствующий импульс X или Y с контрольного интерполятора 9, При этом содержимое второго счетчика 10 не меняется, в противном случае фиксируется отклонение фактической
0 траектории от заданной на единицу дискретности контроля. При накоплении вторым счетчиком 10 ± трех единиц дискретностей контроля он выдает через элемент ИЛИ 11 сигнал Ошибка. Очевидно, величина еди5 ницы дискретности контроля траектории определена программируемым коэффициентом программируемых делителей частоты 7i, 72. Программируемые делители частоты 7i, 72 используются в данном интерполято0- ре с самоконтролем только для того, чтобы в качестве контрольного интерполятора 9 можно было использовать недорогой интерполятор, низкого быстродействия. С другой стороны, точный контроль заданной тра5 ектории имеет особый смысл только при невысоких частотах, т.е. при рабочих подачах режущего инструмента, когда происходит съем металла. Для большинства металлообрабатывающих станков с ЧПУ такие подачи имеют предел 200 мм/мин, что соответствует частоте выходных импульсов интерполятора 2 примерно 300 Гц. В данном интерполяторе с самоконтролем блок задания скорости 1 устанавливает коэффициент деления К программируемых делителей частоты 1, 72 равный единице, для подач до 60 мм/мин, для более высоких подач он линейно возрастает и для подачи 1200 мм/мин равен 20.
Фиг.2 и фиг.З приведены для случая контроля каждого импульса интерполятора 2 (К 1), причем фактическая траектория на фиг.2 интерполятора 2 искажается относительно заданной, начиная с третьего шага интерполяции, а на фиг.З - со второго. Ошибка возникает соответственно после 15-го шага и 14-го. Отклонение траектории от заданной по координатам составляет:
ДХк ДУк 3 К 3
На фиг.4 контролируется каждый второй импульс интерполятора 2 (К 2). Отклонение фактической траектории от заданной начинается с 6-го шага, Значение ошибки по координатам составляет:
AXk AYk 3 К 6
Выбранная точность контроля заданной траектории перемещения режущего инструмента определена равной трем единицам дискретности контроля из чисто практических соображений в процессе отладки интерполятора с самоконтролем. Такое решение является компромиссом между идеальным контролем и допустимыми сбоями интерполятора УЧПУ2, не приводящими к браку обрабатываемых деталей,
Преимущества предлагаемого интерполятора с самоконтролем демонстрируются на фиг.7. Здесь рассмотрен случай отработки интерполятора 2 кадра управляющей программы с линейной интерполяцией (начальный участок прямых 1, 2 см. на фиг.2).
Прямая 1 - это идеализированная заданная траектория, 2 - фактическая в результате, например, неисправности интерполятора 2.
В прототипе контроль срабатывает в точке Б траектории 2, т.е. когда обнуляется счетчик 5t и переполнится счетчик 3. Максимальное отклонение траектории будет ДУо. В предлагаемом интерполяторе с самоконтролем контроль срабатывает в точке А с максимальным отклонением ДХк ДУк 3 К, где К - коэффициент деления делителей 71, 72.
В цифрах это может выглядеть следующим образом.
Пусть рабочая подача соответствует 60 мм/мин, т.е. К 1. Цена одного приводного импульса по координатам равна 0,01 мм Х2
-Xi 100 мм; Y2 1i 100 мм. Возьмем предельный случай: фактическая траектория параллельна оси X, т.е. импульсы от
. интерполятора 2 по координате У вообще не 5 поступают. Значит УЗ - Y1 0 Следовательно, в этом случае ДУо 100 мм, а Д Хк Д УК 3-1-0.01 0,03 мм. Преимущество предлагаемого интерполятора с самоконтролем от- носительно прототипа очевидно. В 0 варианте с прототипом на станке произойдет авария: либо брак детали, либо поломка элементов станка. В варианте с интерполятором с самоконтролем, в случае с получи- стовой обработки, брака детали не 5 произойдет.
Заданная геометрическая информация для интерполяторов - это программируемые приращения по координатам X, У т.е. Xz
-Xi (см. фиг.7) для линейной интерполяции 0 и плюс координаты центра окружности - для
круговой интерполяции.
Проверка отклонения фактической траектории от заданной в результате сбоя работы интерполятора 2 происходит за счет
5 контрольных расчетов, производимых контрольным интерполятором 9, в результате ко- .торых при отсутствии рассогласования траекторий на каждый выходной импульс программируемого делителя частоты 7, дол0 жен образоваться X1 и отсутствовать У , а на каждый выходной импульс 72 образоваться импульс У и отсутствовать X . В этом случае второй счетчик 10 не меняет своего состояния, что говорит о нормальном фор5 мировании фактической траектории. Ф о р м у л а и з о б р е т е н и я Интерполятор с самоконтролем, содержащий блок задания скорости, первый информационный выход которого соединен с
0 частотным входом основного интерполятора, вход блокировки которого подключен к выходу элемента И, первый вход которого соединен с выходом первого координатного счетчика импульсов и с управляющим вхо5 дом первого коммутатора, информационный вход которого соединен с первым информационным выходом основного интерполятора, второй вход элемента И соединен с выходом второго координатного
0-счетчика импульсов и с управляющим входом второго коммутатора, информационный вход которого соединен с вторым информационным выходом основного интерполятора, первый и второй выходы ин5 терполятора с самоконтролем соединены со счетными входами соответствующих координатных счетчиков и соответственно с первыми выходами первого и второго коммутаторов, вторые выходы которых под- ключены к первому и второму входам первого счетчика импульсов, отличающий с- я тем, что, с целью повышения надежности работы интерполятора за счет контроля текущих интерполяционных шагов, в него введены первый и второй программируемые делители частоты, первый и второй элементы ИЛИ, контрольный интерполятор и вто рой счетчик импульсов, выход которого соединен с первым входом первого элемента ИЛИ, второй вход которого подключен к выходу первого счетчика импульсов, а выход - к выходу Ошибка интерполятора с самоконтролем, суммирующий вход второго счетчика импульсов соединен с выходом
Отклоните
первого программируемого делителя частоты и с первым входом второго элемента ИЛИ, выход которого соединен с информационным входом контрольного интерполятора, координатный выход которого подключен к вычитающему входу второго счетчика импульсов, входы задания коэффициентов первого и второго программируемых делителей частоты соединены с вторым выходом блока задания скорости, а информационные входы - соответственно к первому и второму информационным выходам интерполятора.
Фиг. Z
Отклонение
(Начало
Запись 6 РУС УСО
1
Запись 8 счетчик О значение К
1
Запись в РУС УС
Записать в счетчик значение /С
i
( Конец Фи&Ј
Рссг.Г
| Цифровой интерполятор | 1977 |
|
SU665286A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Интерполятор с самоконтролем | 1985 |
|
SU1280576A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
