бок регулирования у,р соотношения натяжений материала
1280691 Если запянкые достигнуты, сумма разностей ошибок
регулирования равна нулю. 2 ил.
Изобретение относится к электротехнике и может быть использовано, например, при регулировании соотношения натяжений материала в отдельных зонах технологических линий, оснащенных многодвигательным электроприводом, построенным по принципу подчиненного регулирования.
Цель изобретения - повьшение точности регулирования.
На фиг.1 изображена функциональная схема многодвигательного электропривода, напримерi для регулирования натяжения материала; на фиг.2 - функциональная схема вычислительных блоков и сумматоров.
Многодвигательный электропривод содержит электродвигатели 1 - 3 тянущих валков 4 7. Якорные обмотки электродвигателей 1 - 3 подключены преобразователям 8 - 10, в цепь уп-г
. равления каждого из которых включен последовательносоединенные соответственно регуляторы 11 - 13 тока, регуляторы 14 - 16 скорости и регуляторы 17-19 натяжения. Датчики 20 - 22 тока и датчики 23 - 25 скорости подключены к входам соответствующих регуляторов II - 13 тока и регуляторов 14-16 скорости. Сумматоры 26 - 28 к одному входы которых подключены соответственно датчики 29-31 натяжения, а к другому - задатчики 32 - 34 натяжения. Кроме того, электропривод содержит дополнительные сумматоры 35 и 36, блок 3 формирования усредненного значения ошибок и вычислительные блоки 38 - 40, причем входы блока 37 соединены с выходами сумматоров 26 - 28, а выход - с входом каждого из вычислительных блоков 38 - 40. Другие входы каждого из вычислительных блоков 38 40 соединены с выходами дополнительных сумматоров. Первые
.и вторые входы каждого из дополнительных сумматоров 33 и 36 соединен
регулирования равна нулю. 2 ил.
с выходами соответственно сумматоров 26 - 28. Выходы вычислительных блоков 38 - 40 соединены с входами соответствующих регуляторов 17 - 19
натяжения.
Многодвигательный электропривод работает следующим образом.
Управление электродвигателями . производится от регулируемых преобг
разователей 8 - 10, имеющих подчиненную систему регулирования требуемого параметра.Число подчиненных контуров зависит от вида регулируемого параметра, причем его контур регулирования всегда будет внешним. Таким образом, в .каждом контуре имеются соответственно собственные регуляторы 11 - 13 тока, регуляторы скорости 14 - 16 и регуляторы натяжения 17 19. В дополнительных сумматорах 35 и 36 определяются разности ошибок регулирования натяжения смежных зон линии у и у , а в блоке 37 определяется усредненное значение ошибок регулирования. Затем формируются управ- ляющие сигналы V V и V на выходе вычислительных блоков 38 - 40 в соответствии с функцией
n-t
, ,-1
V. -fSJ yj (j-п) у,-) + - - Уср.
где i 1,2,...п;
п - число электродвигателей;
у. 4,v,-f, - разность ошибок регу- 4 3
лирования смежных кана1 лов;
у - J- U),
Р п 1 - усредненная ошибка регулирования;
X. - ошибка регулирования
канала;
:У, - задающее воздействие и выходная величина канала соответственно; {6. 0,1 - коэффициент настройки;
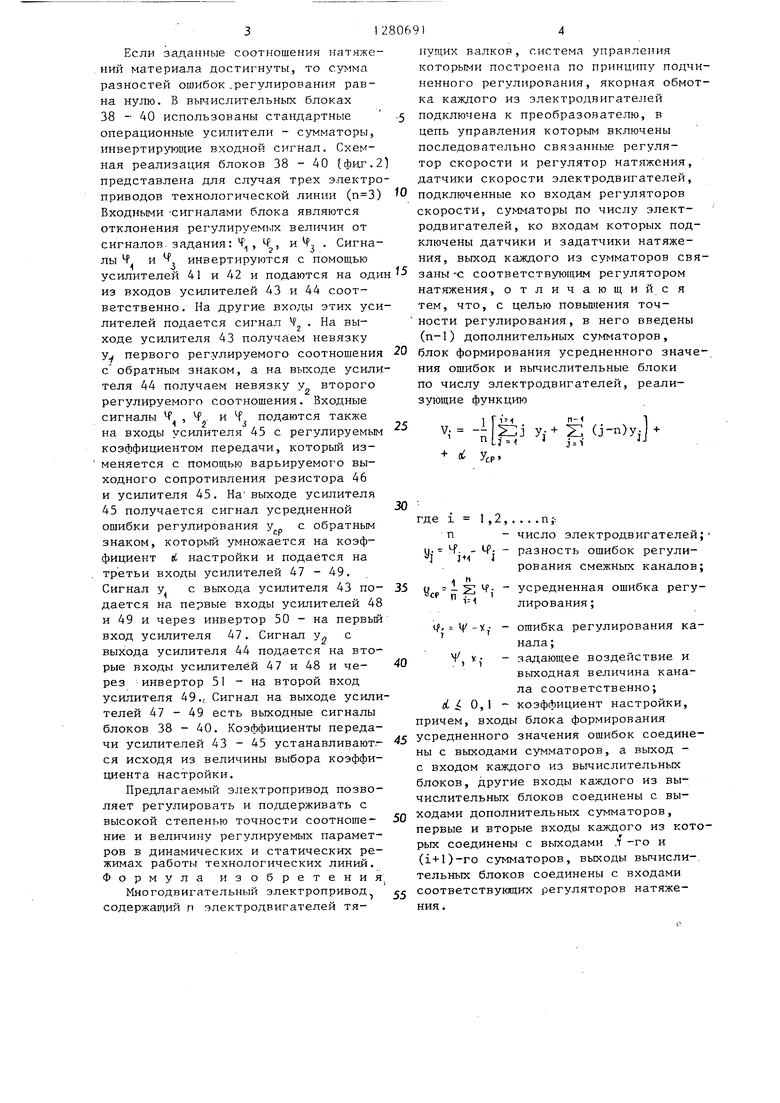
Если заданные соотношения натяжений материала достигнуты, то сумма разностей ошибок .регулирования равна нулю. В вычислительных блоках 38 - 40 использованы стандартные онерационные усилители - сумматоры, инвертируюище входной сигнал. Схемная реализация блоков 38 - 40 (фнг.2} представлена для случая трех электроприводов технологической линии () Входными Сигналами блока являются отклонения регулируемых величин от сигналов задания: Ч , , и Ч . СигнаfO
лы
Ч
инвертируются с помощью
нущих валков, система управления которыми построена по принципу под ненного регулирования, якорная обм ка каждого из электродвигателей подключена к преобразователю, в цепь управления которьпи включены последовательно связанные регулятор скорости и регулятор натяжения датчики скорости электродвигателей подключенные ко входам регуляторов скорости, сумматоры по числу элект родвигателей, ко входам которых под ключены датчики и задатчики натяже ния, выход каждого из сумматоров св
усилителей 41 и 42 и подаются на один -5 заны-с соответствующим регулятором
из входов усилителей 43 и 44 соответственно. На другие входы этих усилителей подается сигнал Ч . На выходе усилителя 43 получа:ем невязку yj первого регулируемого соотношения с обратным знаком, а на выходе усили теля 44 получаем невязку у второго
регулируемого соотношения. Входные сигналы Ч , Ч. и Ч подаются также на входы усилителя 45 с регулируемым коэффициентом передачи, который изменяется с помощью варьируемого выходного сопротивления резистора 46 и усилителя 45. На выходе усилителя 45 получается сигнал усредненной ошибки регулирования у с обратным знаком, который умножается на коэффициент ct настройки и подается на третьи входы усилителей 47-49.
Сигнал у с выхода усилителя 43 подается на первые входы усилителей 48 и 49 и через инвертор 50 - на первый вход усилителя 47.. Сигнал у с выхода усилителя 44 подается на вторые входы усилителей 47 и 48 и через инвертор 51 - на второй вход усилителя 49.1 Сигнал на выходе усилителей 47 - 49 есть выходные сигналы блоков 38 - 40. Коэффициенты передачи усилителей 43-45 устанавливают.- ся исходя из величины выбора коэффициента настройки.
Предлагаемый электропривод позволяет регулировать и поддерживать с высокой степенью точности соотношение и величину регулируемых параметров в динамических и статических режимах работы технологических линий. Формула изобретения
Мно годвигательный электропривод содержащий п электродвигателей тя
нущих валков, система управления которыми построена по принципу подчиненного регулирования, якорная обмотка каждого из электродвигателей подключена к преобразователю, в цепь управления которьпи включены последовательно связанные регулятор скорости и регулятор натяжения, датчики скорости электродвигателей, подключенные ко входам регуляторов скорости, сумматоры по числу электродвигателей, ко входам которых подключены датчики и задатчики натяжения, выход каждого из сумматоров свя
натяжения, отличающийся тем, что, с целью повьаиения точности регулирования, в него введены (п-1) дополнительных сумматоров, блок формирования усредненного значения ошибок и вычислительные блоки по числу электродвигателей, реализующие функцию
1 Г1( п- 1
v- Z3J у,-+ z:, (j-n)yj
j.i + 0 У,
CP
1 n
1,2,
.n;t
- число электродвигателей; разность ошибок регулирования смежных каналов;
У,
СР
1 s
усредненная ошибка регулирования ;
,
If, ii(. - ошибка регулирования канала;
задающее воздействие и выходная величина канала соответственно; iL 0,1 - коэффициент настройки, причем, входы блока формирования усредненного значения ошибок соединены с выходами сумматоров, а выход - с входом каждого из вычислительных блоков, другие входы каждого из вычислительных блоков соединены с выходами дополнительных сумматоров, первые и вторые входы каждого из которых соединены с выходами л -го и (i+l)-ro сумматоров, выходы вычисли-, тельных блоков соединены с входами соответствующих регуляторов натяжения.
23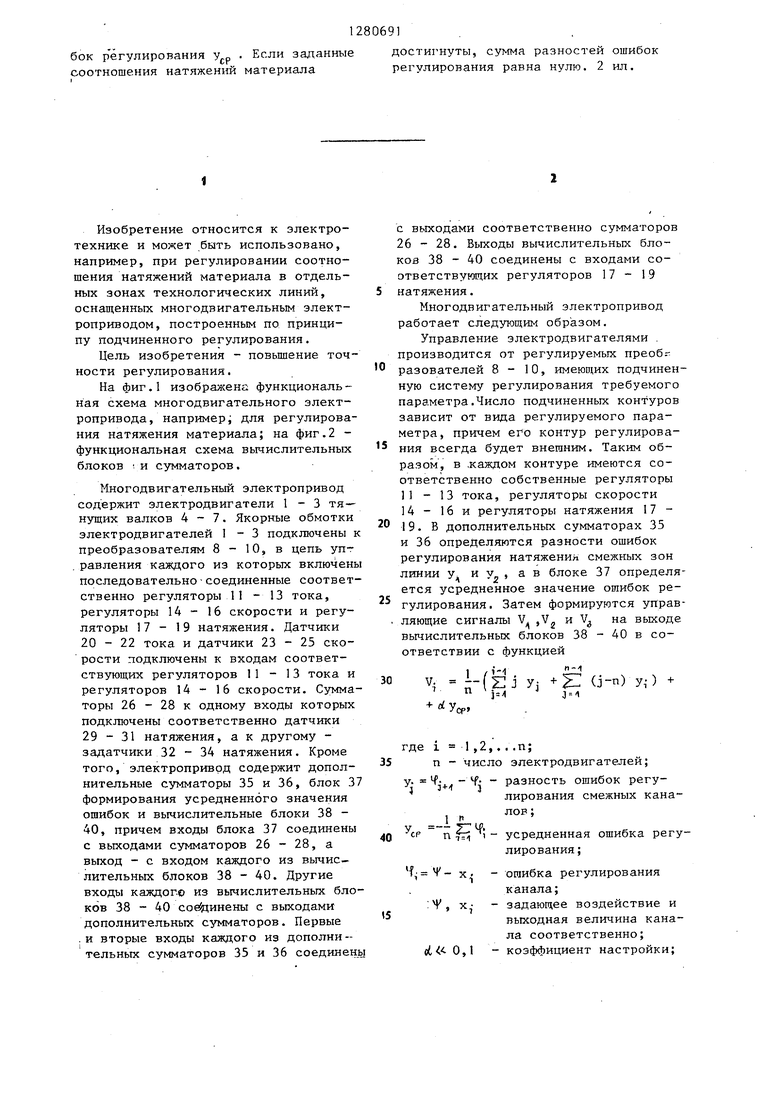
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод перемещения механизма подачи станка | 1982 |
|
SU1115191A1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2068614C1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |

Изобретение относится к электротехнике и может найти применение для регулирования соотношения натяжений материала в отдельных з онах технологических линий. Повышение точности регулирования обеспечивается за счет того, что в дополнительных сумматорах 35,36 определяются разности ошибок регулирования натяжения смежных зон линии у и у , а в блоке 37 - усредненное значение ошибок регулирования. Затем формируются управлякщие сигналы на выходе вычислительных блоков 38, 39, 40 путем алгебраического суммирования разностей ошибок регулирования у ,.Уд и усредненного значения ошиW ,: 12 ю эо Фа.1
| Барыгаников В.Д | |||
| и др | |||
| Автоматизированные электроприводы с непосредственным и косвенным регулированием натяжения обрабатываемого материала | |||
| Информэлектро, сб.Электротехническая промьшшенность | |||
| сер | |||
| Электропривод, 1978, вып | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ регулирования натяжения материалаНА НЕпРЕРыВНО-пОТОчНыХ АгРЕгАТАХС МНОгОдВигАТЕльНыМи РЕгулиРуЕМыМипО СКОРОСТи элЕКТРОпРиВОдАМи | 1979 |
|
SU853761A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ,: сг , cf | |||
| x,rr- ,ф О «Ф - | |||
