Изобретение относится к подъемно-транспортному оборудованию, в частности к захватам для цилиндрических грузов, например бочек и позволяет в поднятом положении производить их кантовку.
Цель изобретения - повышение надежности.
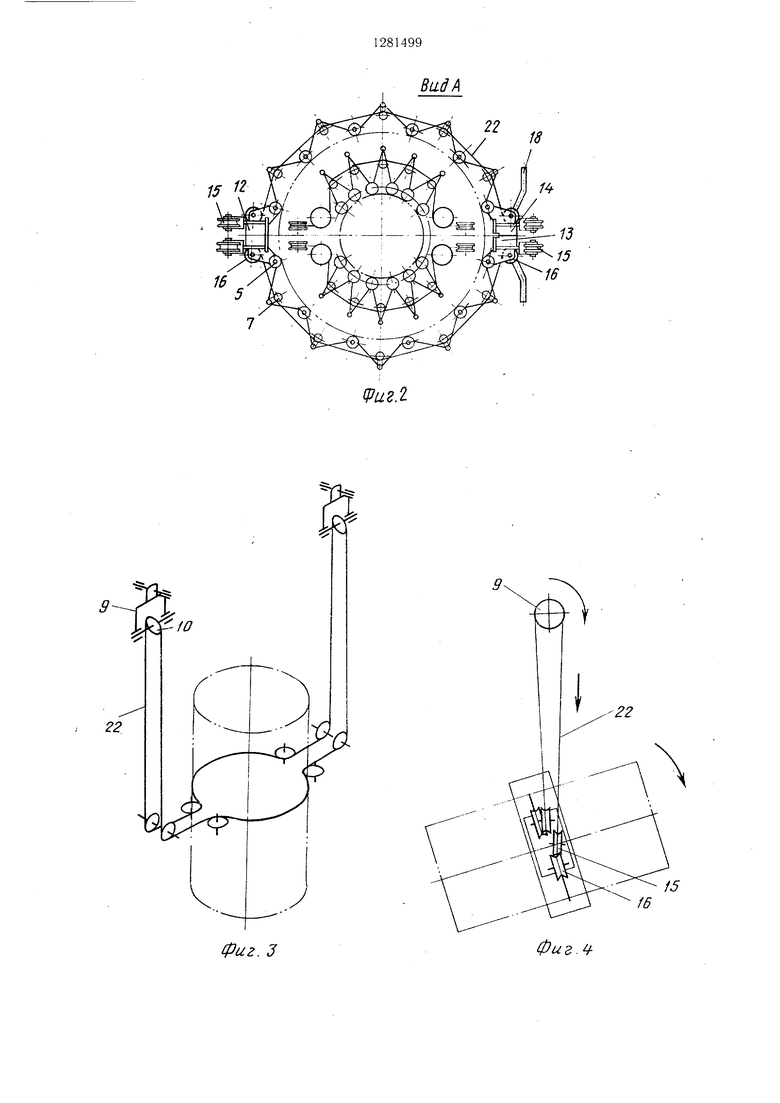
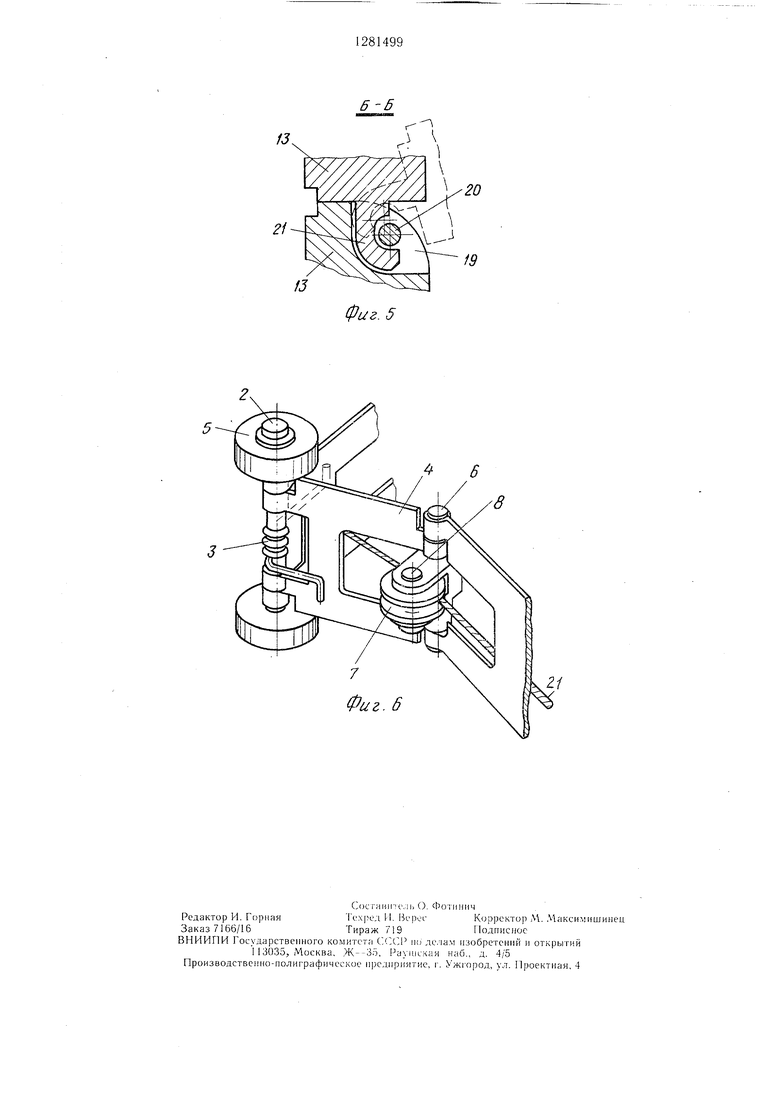
На фиг. 1 изображен захват в рабочем положении, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - запасовка троса; на фиг. 4 - положение роликов, установленных на рычагах, при noBopofe груза на максимальный угол; на фиг. 5 - разрез Б-Б на фиг. 1; на фиг. 6 - участок захватного элемента, изометрия.
Захват содержит „охватывающие груз захватные элементы 1 в виде складывающегося щарнирного пластинчатого многозвен- ника. На концах осей 2, связывающих каждые две подпружиненные пружиной 3 пластины 4, установлены обрезиненные прижи.м- ные ролики 5, а на осях 6, соединяющих каждые две пары пластин, - направляющие ролики 7 на осях 8 (фиг. 6). Захват содержит также блочные обойм.ы 9 с блоками 10, щарнирно закрепленные на концах траверсы 11.
Одни концы захватных элементов связаны кронштейном 12, а другие - кронштейнами 13 и 14. На последних установлены пары роликов 15 и 16, при этом ролики 15 установлены на вертикальной оси, а ролики 16 - перпендикулярно им на кронштейнах 17, установленньЕХ с возможностью поворота относительно горизонтальной оси.
Кронштейны 13 и 14 имеют рукоятки 18, при этом в кронштейне 13 выполнен паз 19 с пальцем 20, а кронштейн 14 имеет крюковой зацеп 21 (фиг. 5).
Блоки обойм 9, ролики 15 и 16 и направляющие ролики 7 огибают замкнутый трос 22, пропущенный через окна в пластинах 4.
Устройство работает следующим образом.
Траверса 11 навешивается на крюк грузоподъемного механизма. При разъединенных кронштейнах 13 и 14 за рукоятки 18 захватные эле.менты 1 заводятся на вертикально стоящую бочку приблизительно на уровне ее центра тяжести (фиг. 1), а крюковой зацеп 21 кронштейна 16 вводится в паз кронштейна 13 так, что палец 20 входит в выборку зацепа 21 (фиг. 5). Под действием пружин 3 в захватных элементах 1 создается усилие, которое обеспечивает равномерное прижатие обрезиненных роликов 5 к стенке бочки, предотвращает сползание бандажа и обеспечивает равномерность шага между осями роликов по периметру бочки.
Далее производится подъем траверсы 11 с натяжением троса 22, который, огибая направляющие ролики 7, создает усилие, направленное к центру через оси 8 и 6, пластины 4, оси 2 на обрезиненные ролики 5, в результате чего захватные элементы 1 сжимают бочку С силой, прямо пропорциональной ее Бесу, и бочка оказывается в поднятом состоянии.
При опрокидывании бочки совместно с ней вращаются захватные эл.ементы 1, кронштейны 11, 13 и 14 и ролики 16, кронштейны 17 с роликами 15 остаются при этом неподвижными (фиг. 4).
Так как трос 22 перекинут через уравновешивающие блоки 10 обойм 9, пространственное положение бочки не сказывается на силе обжига ее захватными элементами 1 - в наклонном положении бочка обжимается с такой силой, как и в вертикальном. Это обеспечит безопас.чость ка1 тован1 я, надежное удержание бочки в положении, близком к горизонтальному, например при сливе из нее, жидкости.
При установке бочки па опорную поверхность трос 22 прослабляется, сведением рукояток 18 зацеп 21 выводится из зацепления с пальцем 20, и кронштейны 13 и 14 разъединяются, а захватпые элементы 1 под действием пружин 3 освобождают бочкч.
Формула изпбретени.ч
Захват для цилиндрических 1 рузов, солер- жаишй траверсу, навешиваемую па крюк грузоподъемной машины, охватьявающие груз захватные элементы, установ,:1енные на последних в диаметрально противогю. южных местах парные отклоняющие ролики с взаимно перпендикулярными осями i соединеп- ный с траверсой трос, огибак)ии1Й захватпые элементы и отклоняющие ролики, отличающийся тем, что, с целью новышс1- ии er(j надежности, каждый захватный элемс1гг включает в себя шарнирно соединенные посредством вертикальных осей подпружиненные попарно пластины с отверстиями д.чя троса, прижимные для груза и направляющие для троса ролики, установленные поочередно в местах соединения .пластин, при этом оси направляющих роликов смещен1 1 внутрь относительно осей шарниров пластин, а захват снабжен блоками, устаиов; ениыми в шарнирно закрепленных на траверсе ибой- мах, при этом трос выполнен : амкпут)1м и огибает блоки, устаиовлепные па траверсе.
16
18
1риг.г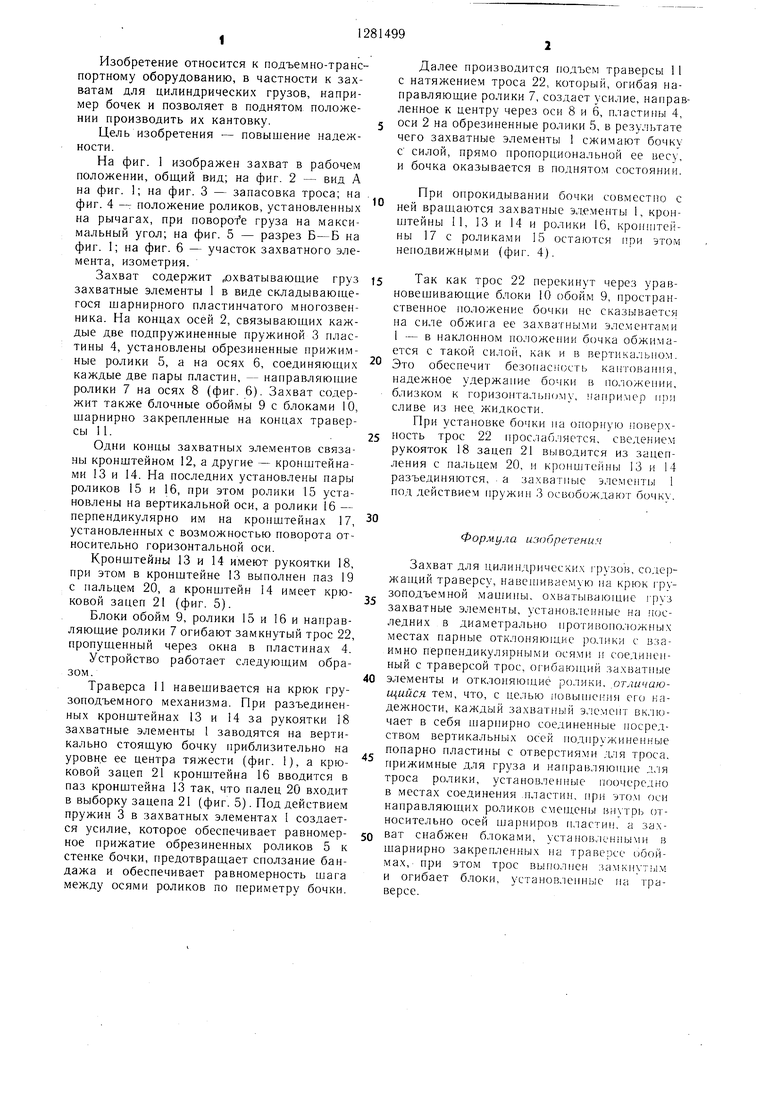
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для цилиндрических грузов | 1987 |
|
SU1481185A2 |
| Захват для цилиндрических грузов | 1982 |
|
SU1089032A1 |
| Захват-кантователь | 1989 |
|
SU1794852A1 |
| УСТРОЙСТВО для ЗАХВАТА И ШТАБЕоТИРОВАНИЯ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ12 | 1972 |
|
SU330103A1 |
| Устройство для захвата груза на поддоне | 1982 |
|
SU1121227A1 |
| Грузовой трюм судна | 1979 |
|
SU789316A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Захват для цилиндрических грузов | 1990 |
|
SU1759777A1 |
| Захватное устройство для контейнеров грейферного типа | 1980 |
|
SU925841A1 |
| Устройство для захвата двух бочек | 1986 |
|
SU1375557A1 |
Изобретение относится к подъемно- транспортному оборудованию, в частности к захватам для цилиндрических грузов. Цель изобретения - повышение надежности. Захват содержит траверсу 11 и захватные элементы 1, состоящие из набора шарнирно сочлененных попарно подпружиненных пластин с отверстиями, в местах соединения которых поочередно установлены прижимные обрезиненные ролики 5 для груза и направ- ляюище ролики для троса. По концам каждого захватного элемента на кронштейнах установлены пары роликов 15 и 16 с взаимно перпендикулярными осями. Замкнутый трос 22 пропущен сквозь отверстия в пластинах и огибает направляющие ролики, пары роликов 15 и 16 и блоки 10, щарнирно установленные на траверсе. С помощью рукояток 18 захватные элементы устанавливаются на грузе, и сцепляются между собой. Цри подъеме траверсы натяжение троса 22 создает на захватных элементах усилие, направленное к центру груза, что обеспечивает надежное его зацепление. 6 ил. Ф х / / 77 U dggpc; b.Q i v- 3 e G lir d -- L:-J Фиг.1 ю 00 4 СО со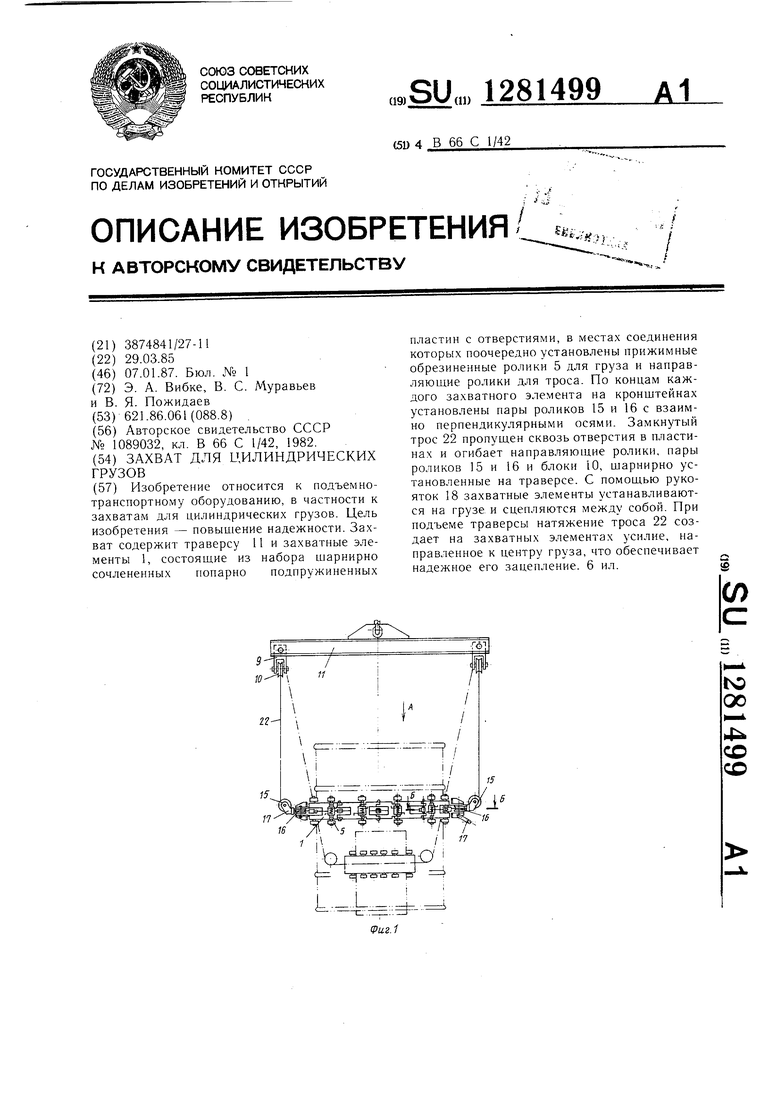
f6
фиг. 3
Фиг.
19
фиг. 5
8
Ф.
иг
| Захват для цилиндрических грузов | 1982 |
|
SU1089032A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
