Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления станции.
Цель изобретения - повышение быстро- действия и упрощение устройства.
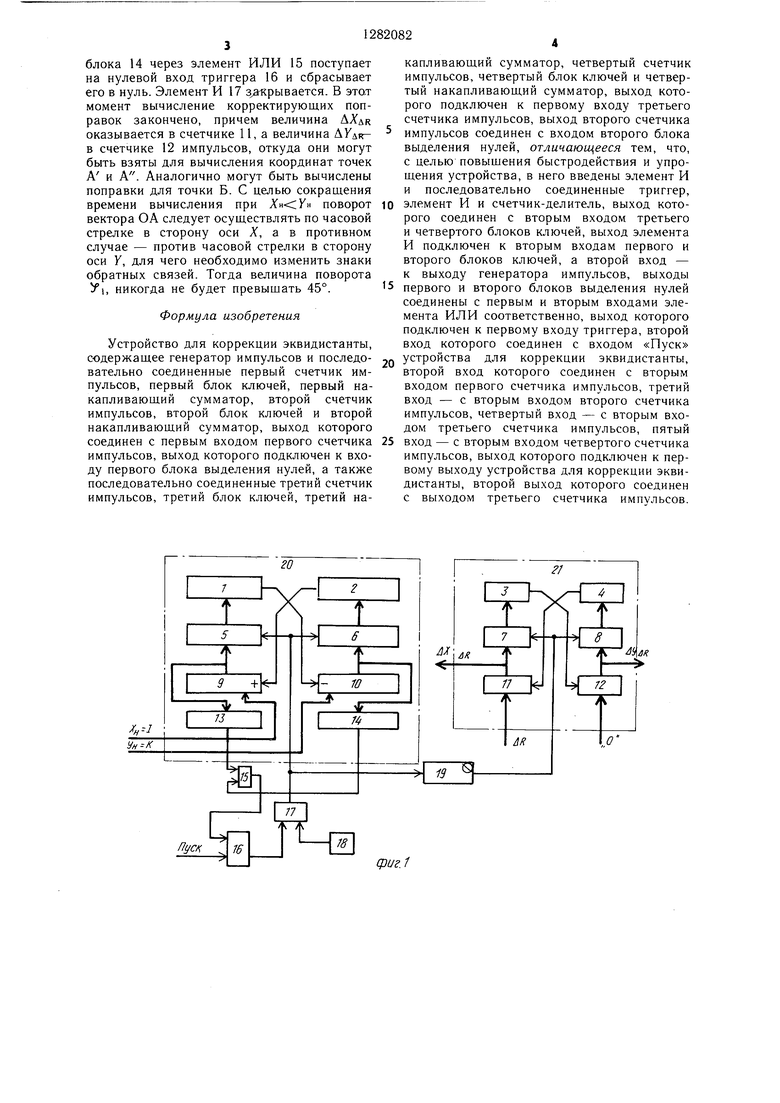
На фиг. 1 изображена структурная схема устройства; на фиг. 2 - графики, поясняющие ее работу.
Устройство состоит из накапливающих сумматоров 1-4, блоков 5-8 ключей эле- ментов И, счетчиков 9-12 импульсов, блоков 13 и 14 выделения нулей, элемента ИЛИ 15, триггера 16, элемента И 17, генератора 18 импульсов, счетчика-делителя 19, причем элементы 1, 2, 5, 6, 9, 10, 13 и 14 образуют первый круговой интерполятор 20, а элементы, 3, 4, 7, 8, 11 и 12 - второй интерполятор 21 поправки.
Информация перед началом вычисления корректирующих поправок распределяется по блокам следующим образом: величина I Х« заносится в счетчик 9 импульсов; величина /С Ун заносится в счетчик 10 импульсов; величина эквидистантной поправки Д/ заносится в счетчик 11 импульсов; в счетчик 12 импульсов заносится накапливающие сумматоры 1-4 сбрасываются в ноль.
Точка А (фиг. 2а) задана нескорректированной траекторией координатами Х и Ун и находится на расстоянии R от точки О. Необходимо вычислить координаты точки Л при или А при . Следовательно, в любом случае необходимо вычислить величину поправок ДУд и ДХдк
Д СО5ф|.
Принцип вычисления поправок известный, отличие заключается в том, что вычисление поправок осуществляется не в два этапа (в известном устройстве), а в один, при этом используется один полноразрядный круговой интерполятор 20 и один малоразрядный круговой интерполятор 21 поправки. Если разрядность первого интерполятора 20 соответствует разрядности системы и, как правило, равна 2 , то разрядность второго интерполятора 21 поправки равна диапазону коррозии Д/, который, как правило, не бывает более 2.
Вычисление корректирующих поправок основано на том, что импульсы аргумента кругового интерполятора, построенного на цифровых дифференциальных анализаторах ЦДЛ, по своей физической сущности яв- ляются приращениями угла, причем число разрядов интерполятора и угловая цена импульса аргумента связаны между собой
следующим соотношением: |-2, где
Л/90 - число импульсов аргумента, которое необходимо подать на вход, интерполятора, чтобы повернуть радиус-вектор на 90°; п - число разрядов интерполятора. Пусть
(число разрядов интерполятора 20), (число разрядов интерполятора 21 поправки.
Но для интерполятора 21 2. Следовательно, угловая цена импульса аргумента интерполятора 21 поправки в 2 раза больще цены импульса аргумента интерполятора 20. Следовательно, для обеспечения синхронного вращения векторов в двух интерполяторах, разрядность которых не совпадает, необходимо, чтобы на вход аргумента интерполятора с меньщей разрядностью поступало в меньще импульсов, чем на вход интерполятора с больщей разрядностью. Эта математическая зависимость известна и является теоретической базой предлагаемого решения.
Распределив информацию по блокам предлагаемого устройства, как это было описано, и подав сигнал «Пуск на единичный вход триггера 16, устройство начинает вычислять корректирующие поправки. Единичный потенциал с единичного выхода триггера 16 открывает элемент И 17, и импульсы высокой частоты с выхода генератора 18 через элемент И 17 начинают поступать на вход аргумента интерполятора 20, т. е. на управляющие входы блоков 5 и 6 ключей. Каждый импульс вызывает передачу на суммирование в накапливающие сумматоры 1 и 2 кодов счетчиков 9 и 10 импульсов. Импульсы переполнения сумматора 1 поступают на вычитающий вход счетчика 10 и уменьшают его состояние на единицу, одновременно импульсы переполнения с выхода сумматора 2 поступают на суммирующий вход счетчика 9 импульсов, увеличивая его состояние на единицу. Такая коммутация обратной связи обеспечивает поворот радиуса вектора ОА по часовой стрелке. Одновременно импульсы аргумента с выхода элемента И 17 поступают на вход делителя 19 с коэффициентом деления 2, импульсы переполнения которого поступают на вход аргумента интерполятора 21 поправки, работающего так же как и интерполятор 20, в результате чего в нем радиус вектор OiC (фиг. 2 б) начинает поворачиваться против часовой стрелки. Так как между входами аргументов п-разрядного интерполятора 20 и т-разрядного интерполятора 21 поправки включен масщтабирующий делитель 19, то несмотря на значительную разность в число разрядов радиусы-векторы ОА и OiC будут вращаться абсолютно синхронно.
В тот момент, когда радиус-вектор ОА, повернувщись на угол ф|, совпадает с осьюХ (фиг. 2 а), радиус-вектор OiC поворачивается также на угол ф1 и оказывается в положении О)С (фиг. 2 б). Этот момент фиксируется блоком 14 выделения нулей, так как в этот момент координата точки А (У/) оказывается равной нулю, т. е. в счетчике 10 импульсов код равен нулю. Выходной сигнал
блока 14 через элемент ИЛИ 15 поступает на нулевой вход триггера 16 и сбрасывает его в нуль. Элемент И 17 з акрывается. В этот момент вычисление корректирующих поправок закончено, причем величина ЛХдк оказывается в счетчике 11, а величина АУдк- в счетчике 12 импульсов, откуда они могут быть взяты для вычисления координат точек А и А. Аналогично могут быть вычислены поправки для точки Б. С целью сокращения времени вычисления при поворот вектора ОА следует осуществлять по часовой стрелке в сторону оси X, а ъ противном случае - против часовой стрелки в сторону оси У, для чего необходимо изменить знаки обратных связей. Тогда величина поворота f, никогда не будет превыщать 45°.
Формула изобретения
Устройство для коррекции эквидистанты, содержащее генератор импульсов и последовательно соединенные первый счетчик импульсов, первый блок ключей, первый накапливающий сумматор, второй счетчик импульсов, второй блок ключей и второй накапливающий сумматор, выход которого соединен с первым входом первого счетчика импульсов, выход которого подключен к входу первого блока выделения нулей, а также последовательно соединенные третий счетчик импульсов, третий блок ключей, третий накапливающий сумматор, четвертый счетчик импульсов, четвертый блок ключей и четвертый накапливающий сумматор, выход которого подключен к первому входу третьего счетчика импульсов, выход второго счетчика
импульсов соединен с входом второго блока выделения нулей, отличающееся тем, что, с целью повышения быстродействия и упрощения устройства, в него введены элемент И и последовательно соединенные триггер,
элемент И и счетчик-делитель, выход которого соединен с вторым входом третьего и четвертого блоков ключей, выход элемента И подключен к вторым входам первого и второго блоков ключей, а второй вход - к выходу генератора импульсов, выходы
первого и второго блоков выделения нулей соединены с первым и вторым входами элемента ИЛИ соответственно, выход которого подключен к первому входу триггера, второй вход которого соединен с входом «Пуск
устройства для коррекции эквидистанты, второй вход которого соединен с вторым входом первого счетчика импульсов, третий вход - с вторым входом второго счетчика импульсов, четвертый вход - с вторым входом третьего счетчика импульсов, пятый
вход - с вторым входом четвертого счетчика импульсов, выход которого подключен к первому выходу устройства для коррекции эквидистанты, второй выход которого соединен с выходом третьего счетчика импульсов.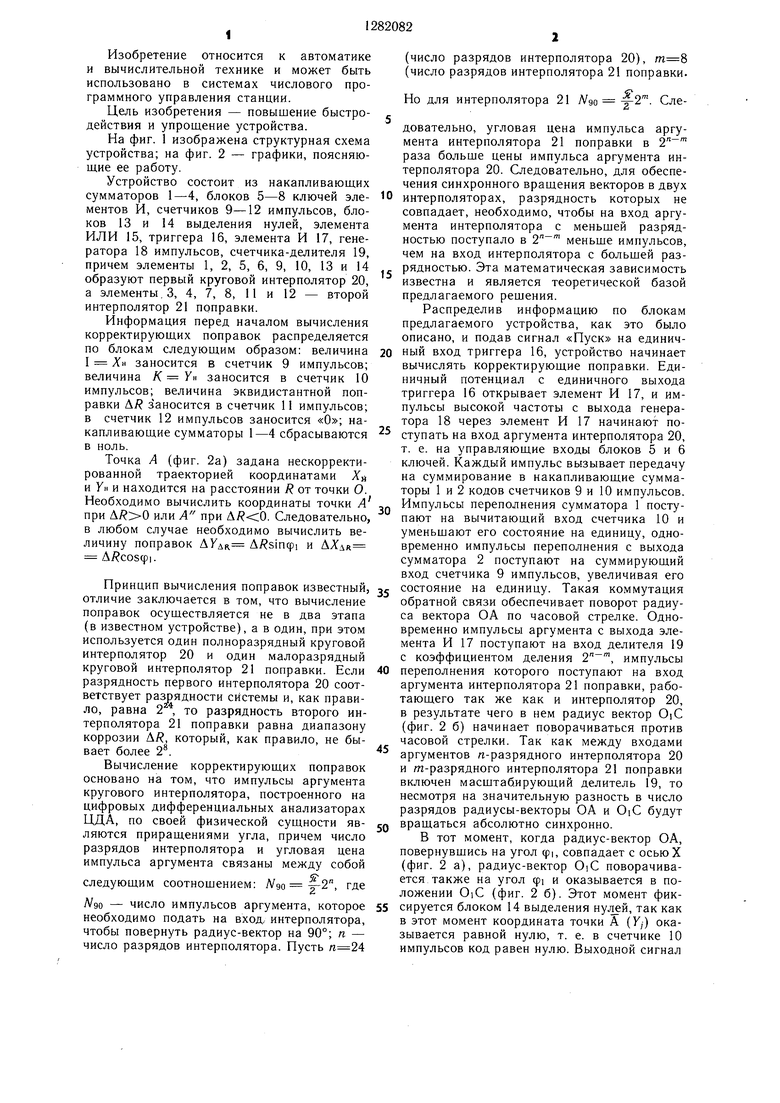
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции эквидистанты в системах числового программного управления | 1985 |
|
SU1282083A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1275375A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Устройство для коррекции эквидистанты | 1991 |
|
SU1803904A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU807236A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Устройство для измерения угла в системах числового программного управления | 1991 |
|
SU1837257A1 |
| Устройство для коррекции эквидистанты | 1986 |
|
SU1318992A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1317398A1 |
| Устройство для задания программы в полярных координатах | 1986 |
|
SU1396125A1 |
Изобретение относится к автоматике и вычислительной технике, в частности к системам числового программного управления станции. Цель - повышение быстродействия и упрош,ение устройства. Устройство содержит генератор импульсов и последовательно соединенные первый счетчик, первый блок ключей, первый накапливающий сумматор, второй счетчик, второй блок ключей и второй накапливаюш,ий сумматор. В устройство введены триггер, элемент ИЛИ, элемент И и счетчик-делитель, а также связи между известными и новыми элементами. Вычисление поправок осуществляется не в два этапа, а в один, при этом используются один полноразрядный и один малоразрядный круговые интерполяторы. 2 ил. с S (Л o 00 1C 00 Ю
///-- ;
У/У--Л
/J
Jf
Г4,
А(н,У)
Oi
фиг.г
| Левин Б | |||
| К., Мельник А | |||
| Ю | |||
| Методы автоматического расчета эквидистанты.-Сб | |||
| статей «Способы подготовки программ и интерполяторы для контурных систем числового управления станками.-М.: Машиностроение, 1970, с | |||
| Реверсивный дисковый культиватор для тросовой тяги | 1923 |
|
SU130A1 |
| Воронов А | |||
| А | |||
| и др | |||
| Цифровые аналоги для систем автоматического управления.- М.: Изд-во АН СССР, 1960 | |||
| Способ коррекции эквидистанты в системах числового программного управления | 1974 |
|
SU591822A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
