QD СЛ 

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угла в системах числового программного управления | 1987 |
|
SU1495749A1 |
| Устройство для измерения угла в системах числового программного управления | 1991 |
|
SU1837257A1 |
| Устройство для задания программы | 1986 |
|
SU1312529A1 |
| Система для программного управления | 1985 |
|
SU1325410A1 |
| Система для программного управления | 1986 |
|
SU1324011A1 |
| Устройство для программного управления | 1986 |
|
SU1317399A1 |
| Устройство для коррекции эквидистанты в системах числового программного управления | 1985 |
|
SU1282083A1 |
| Система для программного управления | 1986 |
|
SU1327063A1 |
| Устройство для задания программы | 1986 |
|
SU1363139A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |

Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах числового управления станками. Цель изобретения - упрощение устройства. Устройство позволяет задавать в необходимых единицах любой угол между осью координат и прямой. В отличие от известных решений устройство не содержит ЭВМ и не нуждается в матобеспечении. Устройство состоит из кругового интерполятора 1 на цифровых дифференциальных анализаторах, четырех счетчиков импульсов 2-5, линейного интерполятора 6, триггеров 7, 8, генератора импульсов 9, элементов И10 - формирователя импульсов 14, элемента ИЛИ 15. 4 ил.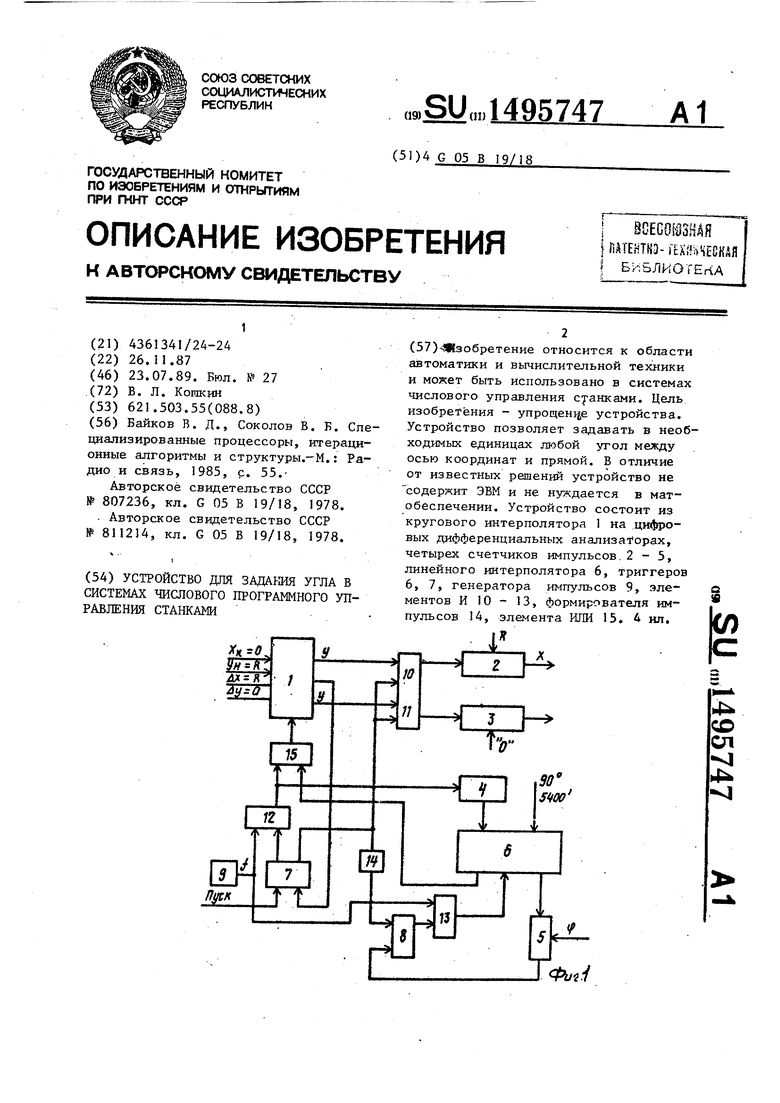
3149
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления станками,
Целью изобретения является упрощение устройства.
На фиг. 1 изображена структурная схема предлагаемого устройства; на фиг. 2 - геометрическая аналогия пер- вого этапа работы устройства; на фиг. геометрическая аналогия второго этапа работы устройства; на фиг. 4 - вариант вьшолнения линейного интерполятора.
Устройство состоит из кругового ,, интерполятора 1 на цифровых дифференциальных анализаторах (1ЩА), счетчи- ков 2-5 импульсов линейного интерполятора 6, триггеров 7 и 8 генератора 9 импульсов, элементов И 10 - 13, фврмирователя 4 импульсов, элемента ИЛИ 15.
Перед началом работы триггеры 7 и 8 находятся в нулевом состоянии, в счетчик 2 занесена длина поворачиваемой прямой R, счетчики 3 и 4 сброшены в ноль. В счетчик 5 занесена величина if заданного угла поворота, в круговой интерполятор 1 занесены в качестве начальных условий величины , т.е. координаты точки Д (фиг. 2) и величины приращений ЛХ R и 4Y R.
В первую координату линейного ин- 35 сти, соответствующей размерности вытерполятора 6 занесен , соответствующий (Г/2 в принятых единицах, например. 90° или 5400.
Устройство работает следующим образом.
Поворот прямой длиной R на з адан- ньА угол выполняется в два этапа. На первом этапе с помощью кругового интерполятора 1 (фиг. 2) осуществляется поворот радиус-вектора R на 90° и подсчитьшается счетчиком 4 количество импульсов аргумента 4 tf , поступившее на вход кругового интерполятора I за время поворота вектора на 90.
По сигналу Пуск триггер 7 устанавливается в состояние единицы и открывается элемент И 12. Поэтому импульсы часто1 ы f с выхода генератора
9 начинают поступать на вход счетчи- этом импульсы его координатных
ка 4, а через элемент ШШ 15 - наприращений через элементы И 10 и 11
вход аргумента интерполятора 1. Припоступают на вычитающий вход счетчиэтом нулевой сигнал триггера 7 бло1у1-ка 2 и суммирую1ций вход счетчика 3
рует элементы И JO и II, и выходныесоответственно. Так продолжается до
0
сигналы интерполятора 1 на входы счетчиков 2 и 3 не поступают до тех пор, пока радиус-вектор ОБ (фиг. 2) не повернется на 90° и не совместится с осью X. Тогда интерпол 1тор 1 выраба- тьшает сигнал Окончание отрЪботки, которьй сбрасывает в ноль триггер 7, Элемент И 12 закрывается. Единичньй сигнал,с нулевого выхода триггера 7 открывает элементы И 10 и 11, а передний фронт этого сигнала через формирователь 14 запускает второй этап работы, т.е. устанавливает в единицу триггер 8. К этому моменту угловая, константа Ч до соответствзгющая числу импульсов аргумента, необходимых для поворота радиус-вектора R на 90°, вычислена и запомнена в счетчике 4. На втором этапе осуществля«ется поворот вектора OR на заданный угол i.
После окончания первого этапа в круговом интерполяторе 1 оказывается информация X 1. R, Y у О, соответст5 вующая точке Д (фиг. 2, 3), в-счетчике 2 сохраняется R, а в счетчике 3 - ноль. В линейньй интерполятор 6 в первую координату занесено число If/2.. в заданной угловой мере, т.е. 90 или
0 5400 или 324000, а во вторую - величина tfgpH3 счетчика 4. В вьгчитаю- 1ГЩЙ счетчик 5, подключенньй к выходу первой координаты, заносят величину Lf угла поворота вектора в размерно0
5
0
бранной константы, т.е. в градусах, минутах или секундах.
Так как выходным импульсом формирователя 14 триггер В установлен в состояние единицы, то открьшается элемент И 13, Частота с выхода генератора 9 через элемент И 13 начинает поступать на фсод аргумента линейного интерполятора 6. Импульсы размерности заданного угла ( с выхода первой координаты линейного интерполятора 6 поступают на вход вычитающего счетчика 5, ас выхода второй координаты через элемент ИЛИ 15 - на вход аргумента кругового интерполятора 1.
Круговой интерполятор 1 начинает поворачивать радиус-вектор R, совме- щенньй с осью X, против часовой стрелки, как это показано на фиг. 3,
тех пор, пока с выходя первой координаты линейного интерполятора 6 на вход счетчика 3 не поступит количество импульсов, равное заданному углу поворота с| . При этом на выходе счетчика 5, появляется импульс, который сбрасьгоает в ноль триггер 8. Элемент И 13 эакрьюается и прохождение импульсов генератора 9 на вход интерполятора 6 прекращается. Поворот вектора R на заданный угол if закончен. При этом в счетчиках 2 и 3 ока- зываются искомые координаты точки А.
Покажем, что вектор R повернулся ровно на заданньо угол q . Действительно, в первую координату линейного интерполятора 6 занесено число, которое в принятой размерности угла Cf соответствует 90° (ТГ/2), а во вторую координату занесено число, соответствующее числу импульсов аргумента, которое .необходимо подать на вхо кругового интер1полятора 1, чтобы за- данньй радиус-вектор R повернулся на 90 , Следовательно, если бы с выхода первой координаты линейного интерполятора 6 ушло число импульсов, равно 90, то на выход aprjweHTa кругового интерполятора 1 с выхода второй координаты поступает число импульсов, равное Но так как отработка поворота радиус-вектора прекратилась, когда с выхода первой координаты .ин- терполятора 6 упшо количество импульсов, равное L/, то и на вход кругового интерполятора 1 с выхода второй координаты пришло количество импульсов, точно соответствзпощее повороту круговым интерполятором 1 радиус-вектора R на угол 1/.
Можно не вычислять 4 tfдд поворотом радиус-вектора R на 90°, а вычислить ее по формуле
Л , /2
2 f- 2
tD--r
Но вычисление по такой формуле требует наличия устройства умножения и регибтра памяти числа t до т-го разряда, 50 геры, формирователь импульсов и элепри этом формула не учитывает числа внутренних микротактов кругового интерполятора 1 и погрешности окружности. Кроме того, круговой интерполятор I на втором этапе работы также выполняет основную задачу поворота радиус-вектора в то время, как устройство умножения никаких функций на втором этапе не вьтолняет, т.е. в
этом случае, кроме линейного и кругового интерполяторов, понадобится егде и устройство умножения, т.е. объем электронного оборудования возрастает. Конечно, поворачивать радиус- вектор имеет смысл только на величину if 45°, что уменьшает время вычисления.
Линейньп интерполятор 6 (фиг. 4)
в варианте состоит из регистра 16, накапливающих сумматоров 17 и 18, элементов И 19 и 20.
В исходном состоянии сумматоры 17
и 18 c6pojw Hbi в ноль ипи в них занесена матйя ая единица (0,5 в двоичном коде, т..е. 100...0). Код 9О или 5400 заносится в регистр 16. Каждый импульс аргумента добавляет к содержимому накапливающих сумматоров коды Q их входов.
При наличии на выходе соответствующего сумматора сигнала переполнения импульс аргумента стробирует этот
сигнал, и на соответствующем выходе интерполятора появляется импульс, т.е. на выходе элемента R 19 или 20. Предложенное.устройство позволяет задавать в необходимых единицах любой угол между осью координат и прямой. Кроме того, оно состоит из интерполяторов, т.е. блоков, органически присущих системам с ЧПУ.
Формула изобретения Устройство для задания угла в системах числового программного управления станками, содержащее круговой интерполятор, линейньй интерполятор, генератор импульсов и первый счетчик импульсов, выход которого соединен с первьм входом линейного интерполятора, отличающееся тем, что, с целью расширения функциональ- возможностей устройства и его упрощения, в него дополнительно введены второй, третий и четвертуй счетчики импульсов, с первого по четвер- тьй элементы И, первьй и второй триг-
мент ИЛИ, причем выход генератора импульсов подключен к первым входам первого и второго элементов И, вторые входы которых соединены соответствен- нр С первьми выходами первого и второго триггеров, второй вьсход первого, триггера соединен с входом формирователя импульсов и с первыми входами третьего и четвертого элементов И,
вторые входы которых подключены к. соответствующим выходам кругового ин-i терполятора, а выходы - соответственно к входу вычитания и суммирования второго и третьего счетчиков импульсов, установочные входы которых соединены соответственно с первым и вторым входами устройства, а выходы - с первым и вторым координатными выхо- дами, выход первого элемента И соединен с входом первого-счетчика импульсов и через п ервый элемент ИЛИ с входом аргумента кругового интерполятора, выход окончания цикла которого подключен к первому входу первого
.Ун)
фи.2.
Вход у еунента
триггера, второй вход которого соединен с входом Пуск устройства для задания угла, вход задания угла которого подключен к информационному входу четвертого счетчика импульсов, вычитающий вход которого соединен с первьм выходом линейного интерполятора, а выход - с первым входом второго триггера, второй вход которого подключен к выходу формирователя импульсов, выход второго элемента И подключен к входу аргумента линейного интерполятора, второй выход которого соединен с вторым входом элемента ИЛИ.
(Х,Ул)
0iff.3
Btaoii xcvemwiyS
| Байков В | |||
| Д., Соколов В | |||
| Б | |||
| Специализированные процессоры, итерационные алгоритмы и структуры.-М.: Радио и связь, 1985, с | |||
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Программное задающее устройство | 1979 |
|
SU811214A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
