(54) СПОСОБ КОРРЕКЦИИ ЭКБИДИСТАНТЫ В СИСТЕМАХ ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ
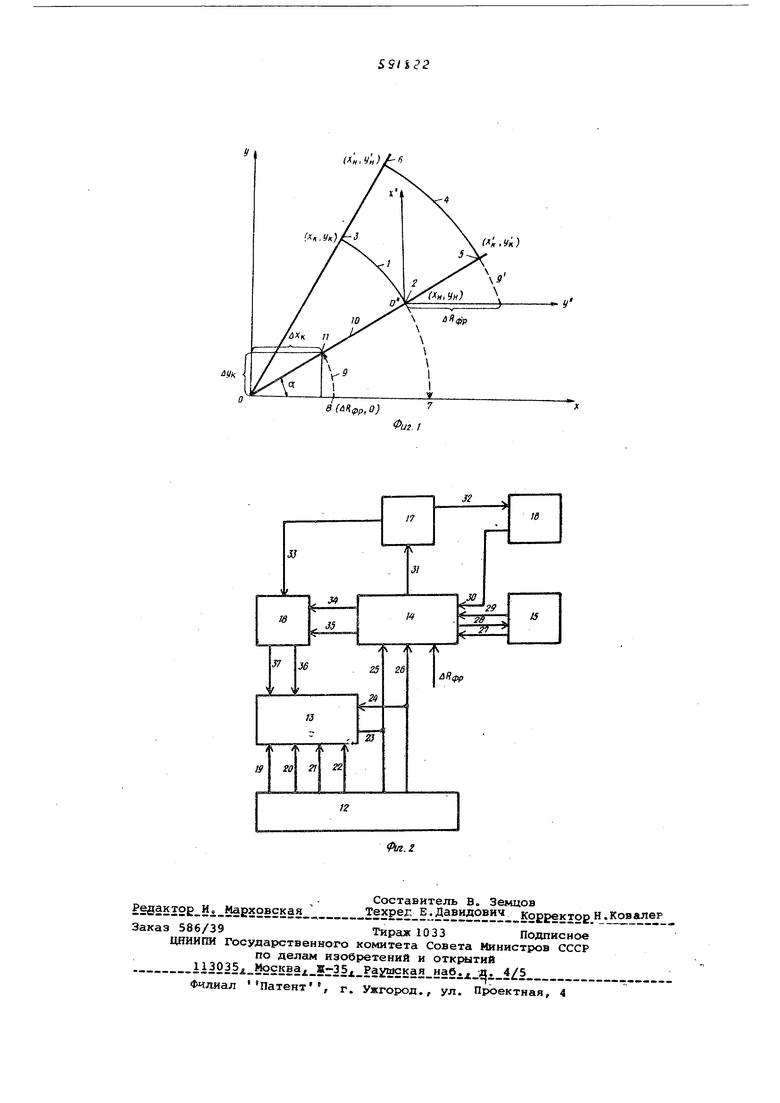
димо найти поправки л X иду к исходHfcJM координатам X j и У, точки 2. По предлагаемому способу эти поправки находят круговой интерполяцией дуги 1 из точки 2 до пересечения этой дуги с осью X в.точке 7, т.е. интерполируют нуля. В качестве параметров дугИ используют координаты конечной точки 2 (Х„, Уц ) . Круговую интерполяцию заканчивают в момент обнулейиякоординаты У. В этот момент информация об угле ос содержится во вспомогательном круговом «интерполяторе . Затем в качестве параметров новой дуги определяют начальные координаты точки 8 ( О, ДТ dtp. в системе координат (X, О , У ) и суммируют их с координатой X. После этого осуществляют круговую интерполяцию дуги 9 в обратную сторону. В этот момент отрабатывается угол об и дуга пересекается с прямой 10. Координаты точки 11 будут равны искомым поправкам 4 X и. & У по абсогаотной величине в системе координатахОТУ J
Устройство (фиг.2) содержит блок задания программ, основной линейнокруговой интерполятор 13, вспомогательный круговой интерполятор 14, блок 15 вьщеления нуля, генератор 16 тактовых импу льсов (ГТИ) , блок 17 регистрации окончания коррекции логический блок 18, а также каналы связи 19-37.
Устройство работает следующим образом.
Информацию на отработку прямых от блока 12 задания программ по каналам 19 и 20 передают на Основной . интерполятор 13 без изменения. Информацию о начальных и конечных точках дуг окружностей Ху, У, и Х,,. У, передают на интерполятор 13 по каналам 21-24. Одновременно координаты конечной точки Х, У по каналам 25 и 26 передают на вспомогательный круговой интерполятор 14. По каналу 30 от ГТИ 16 на вспомогательный интерполятор 14 начинают поступать тактовые импульсы. Круговая интерполяция осуществляется домомента обнуления текущей координаты V.
Круговой интерполятор запоминает угол поворота «с. Момент пересечения дуги Г с осью Х в точке 7 регистрй рует блок 15, который по каналу 29 передает сигнал обнуления регистра текущей координаты X, а по каналу 27 - сигнал на реверс вспомогательного кругового интерполятора 14. В регистр текущей координаты У заносится заданная поправка а затем, подавая тактовые импульсы на вспомогательный интерполятор, осуществляют круговую интерполяцию на первоначальный угол.
Блок 17 регистрации окончания коррекции регистрирует конец поворота на заданный угол et и по каналу 32 вырабатывает сигнал на остановку ГТИ а по каналу 33 дает разрешение на передачу искомых поправок, содержащихся в регистрах текущих координат интерполятора 14, по каналам 34 и 35 поступает на логический блок 18 и далее по каналам 36 и 37 на основной интерполятор 13 для коррекции координат исходной дуги.
Иредложенньлй способ позволяет исключить время на перекоммутацию каналов тактовых импульсов с линейного интерполятора на круговой и обратно после каждого единичного приращения по оси ординат, а также сократить время нахождения координаты искомой .точки за счет введения круговой интерполяции вместо линейной.
Б результате быстродействие интерполяции .можно повысить от 10 до 50%.
Формула изобретения
Способ коррекции эквидистанты в ситемах .числового программного управления, основанный на суммировании основных и поправочных сигналов,о т л и ч ю щ и и с я тем,что,с целью повышения быстродействия интерполирования интерполирь ют основные сигналы заданной координаты круговой интерполяцией до нуля,запоминают сигнал,пропорциональный углу поворота при круговой интерполяции, определяют сигнал, пропорциональный заданной поправке, сумт мируют с основными сигналами и интерполируют в противоположную сторону на первоначальный угол.
Источники информации, принятые во внимание при экспертизе:
1.Левки; Б.И.,: Мальчик А.Ю. Методы автоматическо.го расчета эквидистанты, Сб. статей. СпосоОы подготовки программ и интерполяторы для контурных систем числового управле- . ния станками. М., Машиностроение 1970 г., с. 130-142.
2.Авторское свидетельство СССР
О 295113, кл. ( 05 В 19/00, 21.07.69.
в (й1{фр,0)
м;./;)
у
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции эквидистанты | 1975 |
|
SU538344A1 |
| СПОСОБ КОРРЕКЦИИ ЭКВИДИСТАПТЫЙСЯСОЮЗНАЯ^ • .'*"v-' - -"••;v-||Ap|, . ) .-il : Jb ' , ., •:, .^ -tltit'',b:-u.:^;-;o,,:^KA ( | 1971 |
|
SU295113A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1317398A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Устройство для коррекции эквидистанты | 1976 |
|
SU549786A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1275375A1 |
| Устройство для коррекции эквидистанты | 1986 |
|
SU1318992A1 |
| Устройство для контурного программного управления станком | 1978 |
|
SU716020A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU860004A2 |
J4
ю
35
У
36
гг
21
го
/У
Ю
17
X
г
IS
Жа.
г
26
Rfp
