t-1
Изобретение относится к контрольно-сортировочной технике в машиностроении и может быть использовано для сортировки изделий, находящихся в кассетах.
Целью изобретения является расширение технологических возможностей.
На фиг. 1 изображен предлагаемый
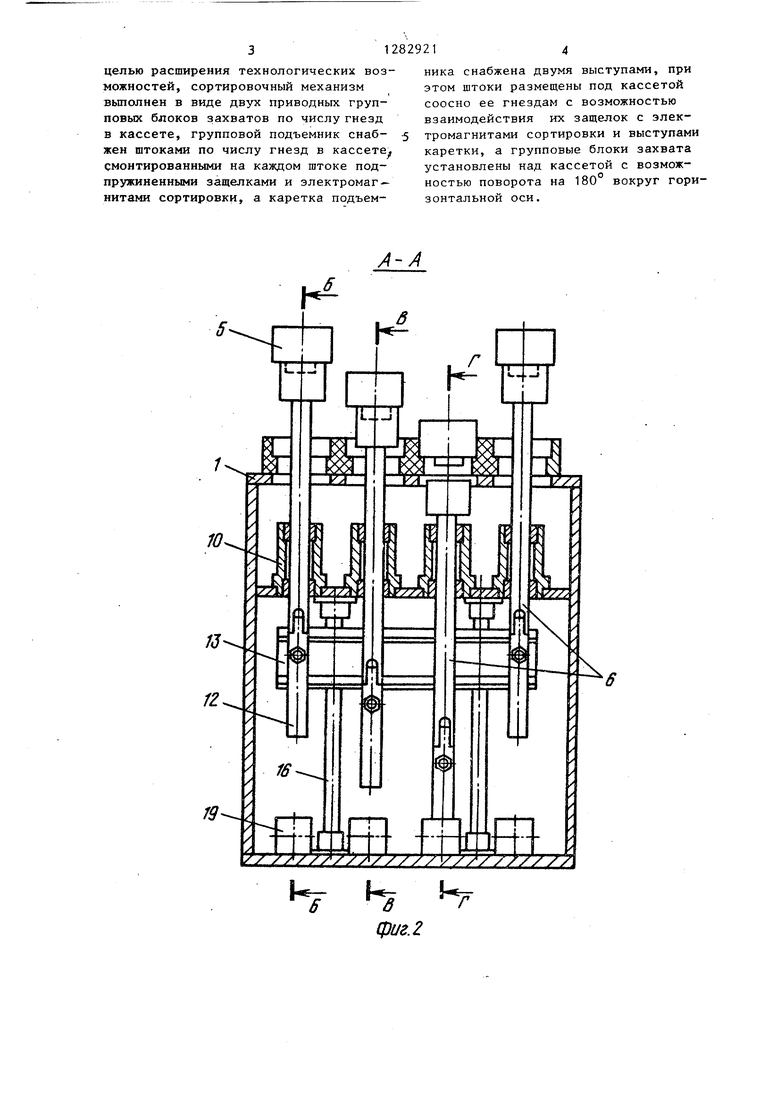
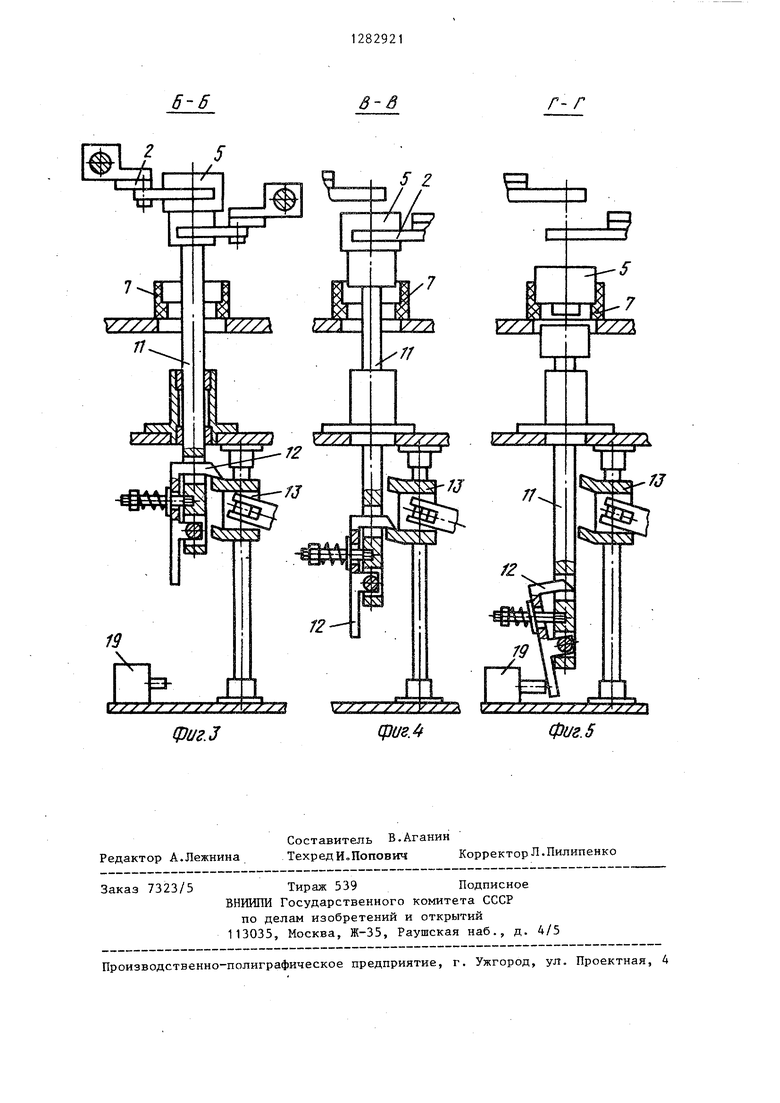
автомат, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1 (верхнее положение штока); на фиг. 4 - разрез В-В на фиг. 2 (среднее положение штока); на фиг. 5 - разрез Г-Г на фиг. 2 (нижнее положение штока).
Автомат содержит станину 1, механизм транспортирования (не показан), блоки 2 захватов, отводящий транспортер 3, лоток 4 для удаления отсортированных изделий 5, подъемник 6 и привод (не показан).
Механизм транспортирования предназначен для перемещения многоместных кассет 7 с группой изделий 5 на позицию сортировки автомата и вывода с нее.
Блоки 2 захватов расположены по обе стороны от позиций сортировки на разных уровнях по высоте и установлены в опорах 8 с возможностью поворота. Захваты 9 выполнены клеще- выми.
Отводящий транспортер 3 и лоток 4 установлены на станине 1 в зонах действия захватов 9.
Подъемник 6 состоит из установленных в направлякядих 10 нескольких (в данном случае четырех) штоков 11, на которых шарнирно закреплены подпружиненные защелки 12, и каретки 13 с выступами 14 и 15, установленной с возможностью перемещения на колоннах 16 и связанной шарнирно-рычажным механизмом 17 с копиром 18 управления. Защелки 12 установлены с возможностью взаимодействия одним кон- цом с выступами 14 и 15 каретки 13, а другим - с электромагнитами 19, связанными со средством контроля (не показано). Автомат работает следующим образом.
Механизм транспортирования перемещает поданную в автомат кассету 7 с изделиями 5 на позицию сортиров- ки на три категории качества. От ко- ,пира 1В каретка 13 перемещается вверх. Для изделия первой катего
рии средство контроля не подает команду на электромагнит 19 и он не меняет положения защелки 12. Каретка 13 своим верхним выступом 14
(фиг. 3) наталкивается на защелку 12.
Шток 11 приводится в движение, захватывает изделие 5 и поднимает его на верхний уровень.
Для изделия второй категории электромагнит 19 получает команду от
средства контроля и нажимает на нижний конец защелки 12. Последняя поворачивается на некоторый угол и ее верхний конец уходит из зоны взаимодействия с выступом 14 каретки 13 (фиг. 4). Каретка 13 движется вверх, когда ее верхний выступ 14 проходит мимо защелки 12, электромагнит 19 освобождает защелку 12 и она возвращается в исходное положение. Движущаяся каретка 13 захваты- зает защелку 12 своим нижним выступом 15 и заставляет шток 11 с изделием 5 подняться на средний уровень.
Для изделия третьей категории электромагнит 19 получает от средства контроля другую команду, по которой он нажимает на защелку 12 и удерживает ее в таком положении во время всего хода каретки 13 (фиг. 5). В результате не происходит взаимодействия каретки 13 с защелкой 12 и изделие 5 остается в кассете 7.
Поднятые на разные уровни изделия
5 оказьшаются в зонах действия захватов 9, которые переносят их на-от- водящий транспортер 3 или на лоток 4, поворачиваясь при этом на 180.
Затем каретка 13 движется вниз и штоки 11 опускаются. Цикл работы повторяется. Механизм транспортирования выводит кассету 7 (пустую или с оставшимися в нем изделиями 5
третьей категории) с позиции сортировки, одновременно перемещая на эту позицию следующую кассету 7 с изделиями 5, подлежащими сортировке.
Формула изобретения
Автомат для сортировки изделий, содержащий механизм транспортирования изделий, включающий кассеты с гнездами для размещения изделий,групповой подъемник с приводной кареткой сортировочный механизм и приемники для рассортированных изделий, о т- личающийся тем, что, с
целью расширения технологических возможностей, сортировочный механизм вьшолнен в виде двух приводных групповых блоков захватов по числу гнезд в кассете, групповой подъемник снабжен штоками по числу гнезд в кассете смонтированными на каждом штоке подпружиненными защелками и электромаг китами сортировки, а каретка подъемника снабжена двумя выступами, при этом штоки размещены под кассетой соосно ее гнездам с возможностью взаимодействия их защелок с электромагнитами сортировки и выступами каретки, а групповые блоки захвата установлены над кассетой с возможностью поворота на зонтальной оси.
180 вокруг гори/-/
19
фиг. 2
6-6
Г- Г
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля деталей цилиндрической формы | 1986 |
|
SU1466815A1 |
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ АВТОМАТ | 1966 |
|
SU179953A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ КОЛЕЦ ПОДШИПНИКОВ | 1991 |
|
RU2016673C1 |
| Автомат для контроля и сортировки изделий цилиндрической формы | 1985 |
|
SU1359006A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
| АВТОМАТ ДЛЯ СБОРКИ | 1992 |
|
RU2005586C1 |
| Многопозиционный автомат для контроля и сортировки цилиндрических деталей | 1980 |
|
SU961796A1 |
| Автомат для многодиапазонной сортировки прецизионных деталей | 1982 |
|
SU1107904A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ ДЕТАЛЕЙ ПО ЛИНЕЙНРАЗМЕРАМ5Ш" | 1972 |
|
SU425671A1 |
| Автоматическая линия Свиноренко для технологической обработки радиоэлементов | 1986 |
|
SU1426755A1 |
Изобретение относится к контрольно-сортировочной технике в машиностроении и позволяет сортировать на три группы изделия, находящиеся в кассетах. После контроля изделия поступают на сортировку в кассетах 7. Сигналы по результатам контроля поступают на злектромагниты 19, которые воздействуют на защелки 12 штоков 11. Если изделия необходимо отсортировать на транспортер 3 или лоток 4, приводная каретка 13 своими выступами 14 или 15 поднимает штоки 11 на разную высоту, откуда изделия снимаются поворотными блоками 2 захватов .Изделия,не поднятые штоками 11,отводятсяв кассетах 7.5 ил. ffffffffavxffXiMnKt:rJKffy fffffffff ff ffff сл ю 00 to со to /II /4 /5 W 7 Лиг. / W
Фиг.З
Редактор А.Лежнина
Составитель В.Аганин
Техред И Попович Корректор Л.Пилипенко
7323/5
Тираж 539Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
(ригА
фиг. 5
| Патент США № 4454947, кл | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
