Известны автоматы для контроля и сортировки деталей па размерные группы по нескольким параметрам, содержащие измерительную станцию, эталон, служапдий для настройки измерительной станции,бесконечныйтранспортер подвода деталей и эталона и электромагниты разбраковки деталей. Однако эти автоматы ненадежны в работе.
В предлагаемом автомате для повышения надежности на нерабочи.х поверхностях эталона и.меются выступы, осуществляющие коммутацию электромагнитов разбраковки и тем самым позволяющие произвести его возврат транспортером в исходное положение.
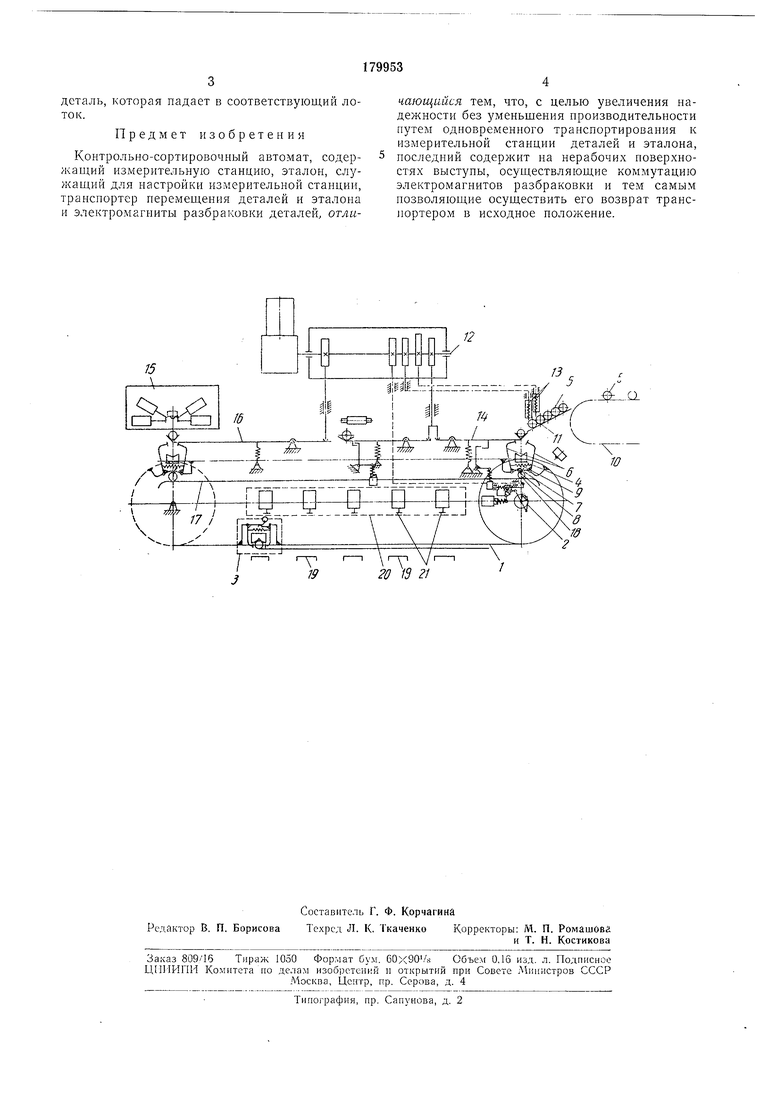
На чертеже изображена схема транспортной и сортировочной систем автомата.
Транспортное устройство выполнено в виде двух параллельных бесконечных цепей /, перемещаемых с помощью храпового механизма 2. Через каждые четыре щага на цепях укреплены каретки 3 (на схеме условно изображены только три каретки). Каретки состоят из призм 4, на которых лежат измеряемые детали 5, и двух прихватов 6, предохраняющих детали от выпадения из призм. Прихваты управляются рычагами 7 и S и стянуты пружиной 9, которая прижимает рычаги один к другому и создает усилие, удерживающее транспортируемую деталь.
вые пальцы, поступают с транспортера линий 10 или из загрузочной кассеты автомата в загрузочный лоток //. Управляемые кулач ками распределительного вала 12 отсекатели 13 выдают детали поштучно на подъемник загрузки 14, который переносит их па призмы транспортного устройства.
Деталь подводится транспортером под измерительную станцию 15, п подъемник 16 переносит ее на позицию измерения. Этот же подъемник возвращает измеренную деталь на транспортер.
Пока призмы находятся на верхней петгз11 транспортера, их прихваты разжаты копиром 17, по которому катятся ролики 18 рычагов 7.
Как только очередпая каретка про11дет измерительную станцию и ролик сойдет с копира, прихваты прижмут деталь к призме.
Нижняя ветвь транспортера используется D качестве сортировочного устройства и проходит над отводящими лотками 19.
При прохождении детали пад соответствующим лотком запоминающее устройство 20 (электрического, электромеханического илп механического типа) подает команду на перемещение соответствующего штока 2l (}ш чертеже условно показап в виде электромагнита). Шток нажимает на ролик, поворачивает рычаги, разжимает прихваты и освобождает
деталь, которая падает в соответствующий лоток.
Предмет изобретения
Контрольно-сортировочный автомат, содержащий измерительную станцию, эталон, служащий для настройки измерительной станции, транснортер неремещения деталей и эталона и электромагниты разбраковки деталей, отличающийся тем, что, с целью увеличения надежности без уменьшения нроизводительности путем одновременного транспортирования к измерительной станции деталей и эталона, последний содержит на нерабочих поверхностях выступы, осуществляющие коммутацию электромагнитов разбраковки и тем самым позволяющие осуществить его возврат транспортером в исходное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛУАВТОМАТ ДЛЯ СОРТИРОВКИ ЦИЛИНДРИЧЕСКИХДЕТАЛЕЙ | 1972 |
|
SU340466A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ по ЛИНЕЙНЫМ | 1971 |
|
SU315900A1 |
| Автомат для контроля и сортировки цилиндрических деталей | 1987 |
|
SU1443978A1 |
| Автомат для контроля деталей цилиндрической формы | 1986 |
|
SU1466815A1 |
| Автомат для сортировки деталей,имеющих форму тел вращения | 1982 |
|
SU1009538A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ КОЛЕЦ ПОДШИПНИКОВ | 1991 |
|
RU2016673C1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ ДЕТАЛЕЙ ПО ЛИНЕЙНЫМРАЗМЕРАМ | 1971 |
|
SU321670A1 |
| АВТОМАТ РОТОРНОГО ТИПА ДЛЯ ПОДРЕЗКИ КРУГЛЫХЗАГОТОВОК | 1969 |
|
SU251402A1 |
| Автомат для контроля крупногабаритных деталей типа валов | 1981 |
|
SU1005955A1 |
| Автомат для сортировки на размерные группы цилиндрических деталей | 1980 |
|
SU878360A1 |
TV ff f9 г/
