руку 5 с рабочим органом 6, Манипулятор снабжен предохранительным устройством, вьшолненным в виде втулки 9 переменного сечения, подпружиненной относительно основания 1 и собачки 11 с индивидуальным приводом 12, шарнирно установленной на основании 1 и взаимодействующей с высту1
Изобретение относится к машиностроению, а именно к промьшшен1-а1М роботам, используемым преимущественно для работы с приборами по измерению толщины ленты (полосы) на станах холодной прокатки.
Целью изобретения является повьше- ние надежности за счет уменьшения поломок при аварийных ситуациях.
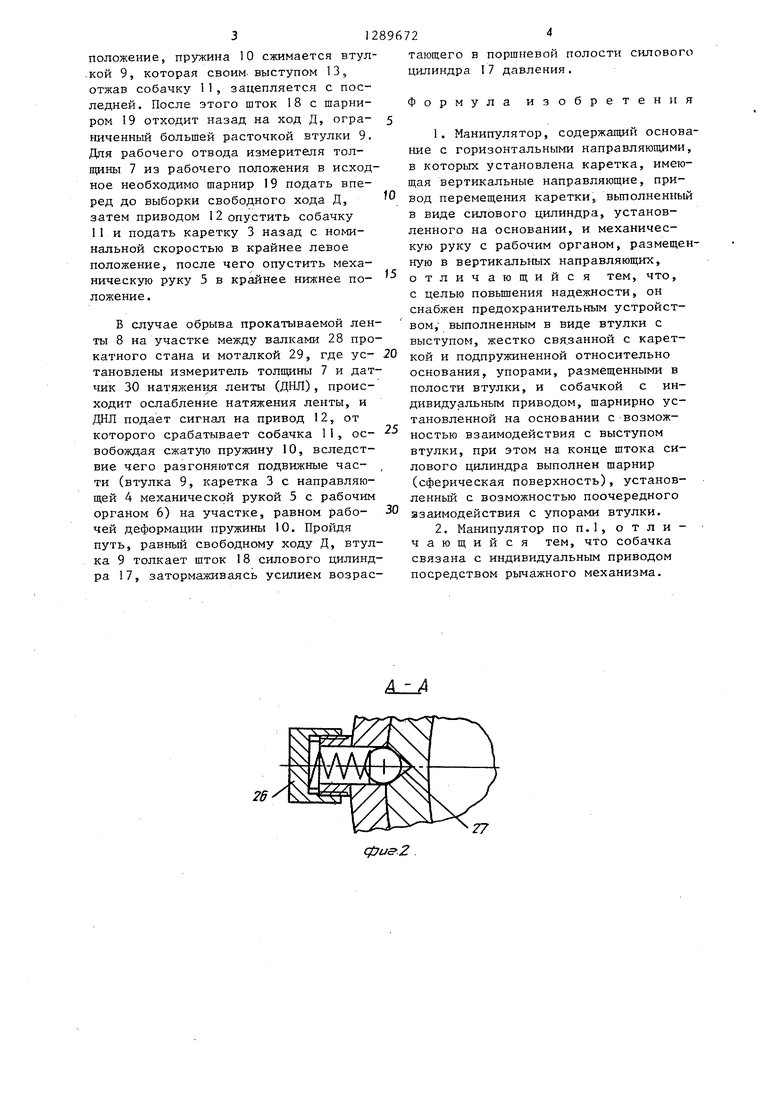
На фиг.1 схематически изображен манипуЬятор; на фиг.2 - сечение А-А на фиг.1; на фиг.3 - вид Б на фиг.1; на фиг.4 - вид В на фиг.З.
Манипулятор содержит основание 1 с горизонтальны Q направляющими 2 , на которых установлена каретка 3 с приводом ее перемещения. На каретке 3 смонтированы вертикальные направляющие 4, на которых установлена механическая рука 5 с рабочим органом 6, несупщм измеритель 7 толщины ленты 8. Манипулятор снабжен предохранительным устройством, выполненным в виде втулки 9 переменного сечения, жестко связанной с кареткой 3 и подпружиненной .относительно основания
Iпосредством пружины 10, и собачкой
IIс индивидуальным приводом 12, шарнирно установленной на основании 1
с возможностью взаимодействия с выступом 13 втулки 9. Собачка 11 связана с индивидуальным приводом 12 посредством серьги .14 и рычагов 15 и 1 6.
Привод каретки выполнен в виде силового цилиндра 17, шток 18 которого жестко связан с шарниром 19, установленным в полости втулки 9 с возможностью поочередного взаимодействия с упорами, выполненными в полости втулки.
На основании i установлен упор 20, на каретке 3 - регулируемый упор
1289672
пом 13 втулки 9. При аварийной ситуации (в случае обрыва ленты) подается команда на включение индивидуального привода J2, который поворачивает собачку и выводит ее из зацепления с выступом 13 втулки 9, и пружина 10 перемещает каретку 3 на безопасное расстояние. 1 з.п. ф-лы, 4 ил
0
21. Вертикальная направляющая 4 имеет опорную поверхность 22, а механическая рука 5 снабжена юбкой 23 для ограничения ее хода.
Для установки измерителя толщины 7 на различную ширину ленты предусмотрено ручное клеммное соединение 24 втул1 :и 9 с кареткой 3. Степень сжатия пружины 10 регулируется винтовым устройством 25.
Механическая рука 5 от поворота вокруг своей продольной оси удер;ки- вается шариковьм фиксатором 26, сопрягаемым с продольным пазом 27, выполненным на поверхности направляющей 4 с усилием, предотвращающим поворот механической руки 5 при прокатке ленты, но ПОЗВОЛЯЮ1ЦИМ поворот руки от усилия набегания оставшейся части оборванной ленты.
Манипулятор работает следующим образом, .
В исходном положении каретка 3 5 и шарнир 19 находятся в крайнем левом положении, а механическая рука 5 - в кр айнем нижнем положениях; пружина 10 разжата, собачка 11 - в крайнем верхнем положении. Продольная ось рабочего органа 6 совпадает с направлением каретки 3 и удерживается в этом положении шариковым фиксатором 26.
Для установки измерителя толщины 7 сначал:а поднимают механическую ру- ky 5 вверх до регулируемого упора 21t переставляемого вручную при наладке и определяющего высоту, на которой измеритель толщины 7 своей щелью Г смог бы охватить ленту 8, затем подают каретку 3 в крайнее правое положение. При этом измеритель тооцины 7 становится в рабочее
0
0
положение, пружина 10 сжимается втул- .кой 9, которая своим- выступом 13, отжав собачку 11, зацепляется с последней. После этого шток 18 с шарниром 19 отходит назад на ход Д, ограниченный большей расточкой втулки 9, Для рабочего отвода измерителя толщины 7 из рабочего положения в исходное необходимо шарнир 19 подать вперед до выборки свободного хода Д, затем приводом 12 опустить собачку 11 и подать каретку 3 назад с номинальной скоростью в крайнее левое положение, после чего опустить механическую руку 5 в крайнее нижнее положение .
Б случае обрыва прокатываемой ленты 8 на участке между валками 28 прокатного стана и моталкой 29, где ус- тановлены измеритель толщины 7 и датчик 30 натяженил ленты (ДНЛ), происходит ослабление натяжения ленты, и ДНЛ подает сигнал на привод 12, от которого срабатывает собачка 11, ос- вобождая сжатую пружину 10, вследствие чего разгоняются подвижные части (втулка 9, каретка 3 с направляющей 4 механической рукой 5 с рабочим органом 6) на участке, равном рабо- чей деформации пружины 10. Пройдя путь, равный свободному ходу Д, втулка 9 толкает шток 18 силового цилиндра 17, затормаживаясь усилием возрас
5
0
тающего в поршневой полости ci-шового цилиндра I7 давления.
Формула изобретения
1.Манипулятор, содержащий основание с горизонтальными направляющими, в которых установлена каретка, имеющая вертикальные направляющие, привод перемещения каретки, вьтолненный в виде силового цилиндра, установленного на основании, и механическую руку с рабочим органом, размещенную в вертикальных направляющих, отличающийся тем, что,
с целью повьш1ения надежности, он снабжен предохранительным устройством, выполненным в виде втулки с выступом, жестко связанной с кареткой и подпружиненной относительно основания, упорами, размещенными в полости втулки, и собачкой с индивидуальным приводом, шарнирно установленной на основании с возможностью взаимодействия с выступом втулки, при этом на конце штока силового цилиндра выполнен шарнир (сферическая поверхность), установленный с возможностью поочередного взаимодействия с упорами втулки.
2.Манипулятор по п,1, о т л и - чающий ся тем, что собачка связана с индивидуальным приводом посредством рычажного механизма.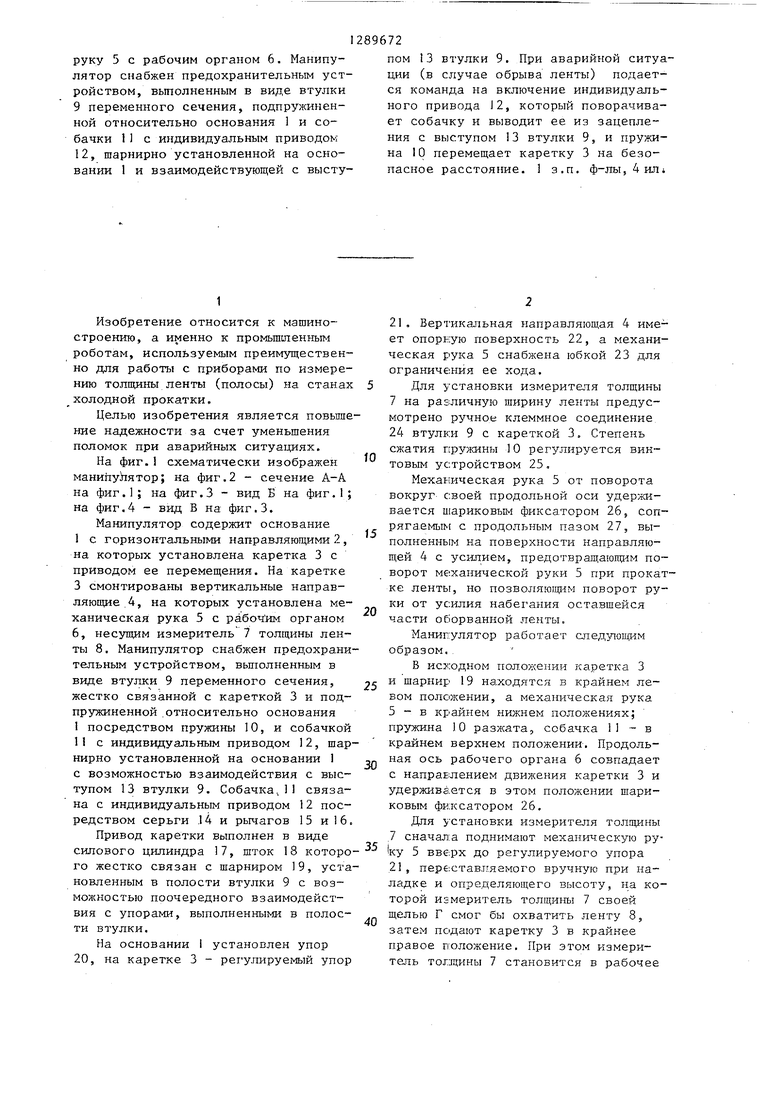
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1207754A1 |
| Манипулятор | 1982 |
|
SU1009754A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| ПРОКАТНЫЙ СТАН ДЛЯ ИЗГОТОВЛЕНИЯ УТОНЯЮЩИХСЯ К КРАЯМ КОЛЕСНЫХ ДИСКОВ | 1925 |
|
SU7435A1 |
| Захват | 1991 |
|
SU1815214A1 |
| Устройство для шагового перемещения спутников | 1985 |
|
SU1305085A1 |
| Штабелеукладчик для штучных грузов | 1983 |
|
SU1144956A1 |
| Автомат для сборки пакетов магнитопроводов электрических машин | 1988 |
|
SU1534645A1 |
| Устройство для перемещения захвата манипулятора | 1982 |
|
SU1079599A1 |
Изобретение относится к машиностроению, а именно к промьппленным роботам, используемым преимущественно для работы с приборами по измере- 1шю толщи1Л)1 ленты на станах холодной прокатки. Целью изобретения является повьппение надежности ма1 ипулятора за счет возможности отвода механической руки. Манипулятор состоит из основания I, на направляющих 2 которого установлена каретка 3 с приводом ее перемещения, несущая механическую Г1 .22 с € L & А (Л ISD с со 05 -4 кэ фиг.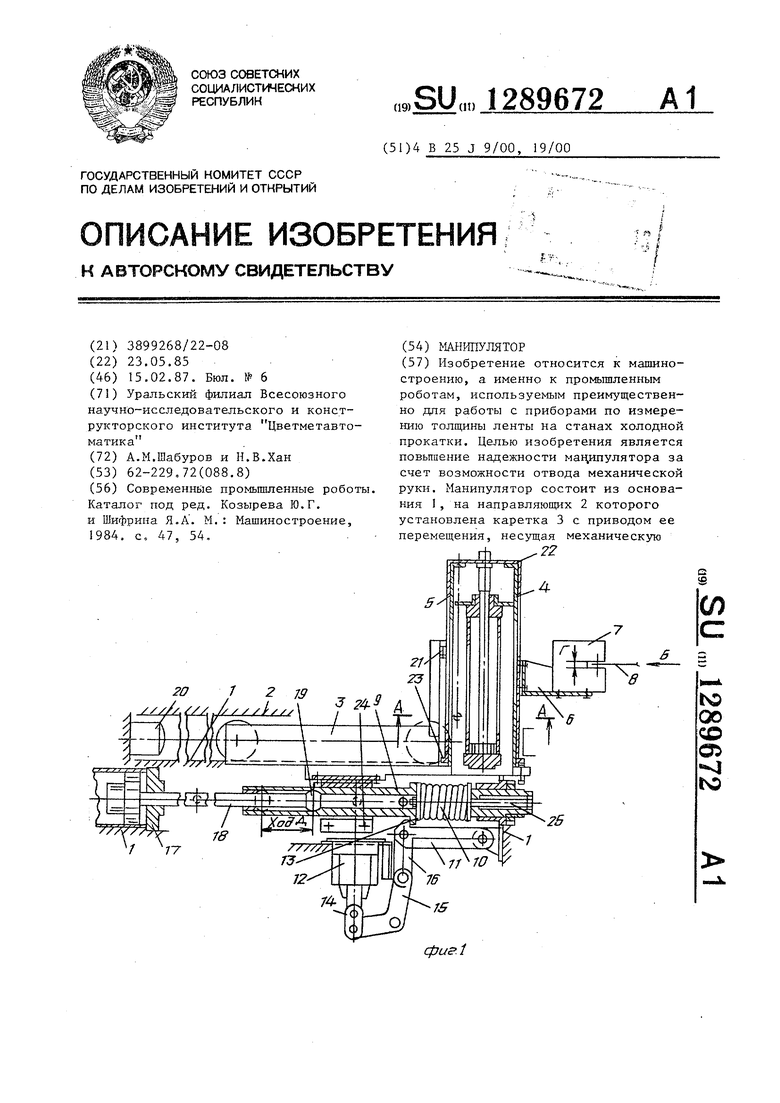
2ff
фие:2
ви Б
/// / ХУ у
30
-ггт-ттгт
.3
Редактор Н.Швыдкая
Составитель А.Ширяева
Техред В.Кадар Корректор Л.Пагай
Заказ 7852/14
Тираж 976Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий , 113035, Москва, Ж-35, Раушская наб,, д, 4/5
Производственно-полиграфическое предприятие, г. Улсгород, ул. Проектная, 4
q yue.
| Современные промьшленные роботы | |||
| Каталог под ред, Козырева Ю.Г, и Шифрина Я,А | |||
| М, : Машиностроение, 1984 | |||
| с | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
