Изобретение относится к машиностроению и может быть использовано для загрузки-разгрузки технологического оборудования.
Известен манипулятор модели "Бриг-10", содержащий основание, на котором смонтирован вал с механической рукой, снабженной захватом, и механизмом подъема и поворота механической руки.
Недостатком известного манипулятора является сложность конструкции из-за необходимости специального механизма поворота захвата для обеспечения ориентированного положения детали.
Известен манипулятор, содержащий основание, на котором смонтирован вал с механической рукой, в корпусе которой размещен приводной захват, и механизмы подъема и поворота механической руки. Механизм подъема содержит силовой цилиндр, который шарнирно связан с основанием и шток которого шарнирно соединен с втулкой, обеспечивающей соединение частей вала. Механизм поворота состоит из втулок и размещенных в разных плоскостях двух силовых цилиндров. Одна из втулок жестко закреплена на валу и снабжена рычагом, а другая установлена на валу с возможностью поворота относительно его оси и снабжена опорным элементом и рычагом. Один силовой цилиндр шарнирно связан корпусом с опорным элементом, а штоком с рычагом. Второй силовой цилиндр шарнирно связан корпусом с основанием, а штоком с рычагом. На основании и опорном элементе размещены упоры и датчики.
Недостатки указанного манипулятора следующие: отсутствие возможности обеспечения первоначального ориентированного положения изделия на всех технологических позициях, вследствие того, что захват механической руки жестко связан с корпусом руки; сложность конструкции и снижение точности позиционирования из-за выполнения механизма поворота в виде расположенных в разных плоскостях силовых цилиндров.
Целью изобретения является обеспечение ориентированного первоначального положения изделия во всех точках позиционирования, а также упрощение конструкции манипулятора.
Поставленная цель достигается тем, что манипулятор содержит основание, на котором смонтирован вал с механической рукой, в корпусе которой размещен приводной захват, и механизмы подъема и поворота механической руки. Захват снабжен механизмом автоматической ориентации, выполненным в виде жестко связанного с подвижным корпусом захвата рычага, шарнирно соединенного посредством регулируемой тяги с рычагом, жестко закрепленным на кольце. Последнее свободно размещено на валу механической руки и установлено на нем с возможностью вертикального перемещения относительно основания. Корпус захвата установлен с возможностью поворота относительно корпуса механической руки. Механизм поворота выполнен в виде расположенного в плоскости основания и шарнирно закрепленного на нем силового двухкамерного цилиндра, шток которого посредством рычага шарнирно соединен с валом механической руки.
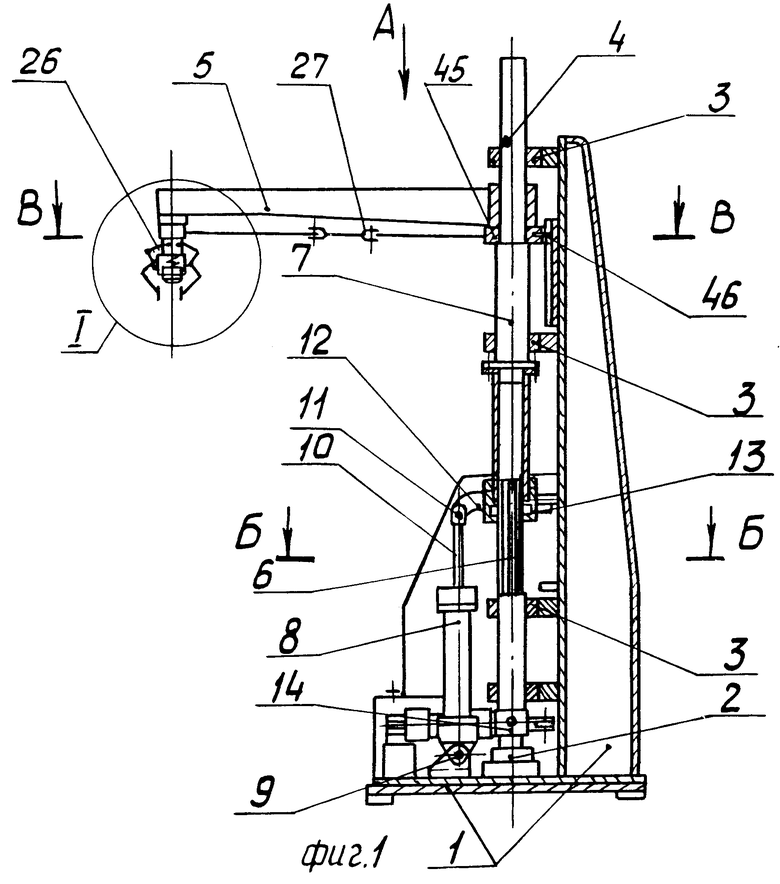
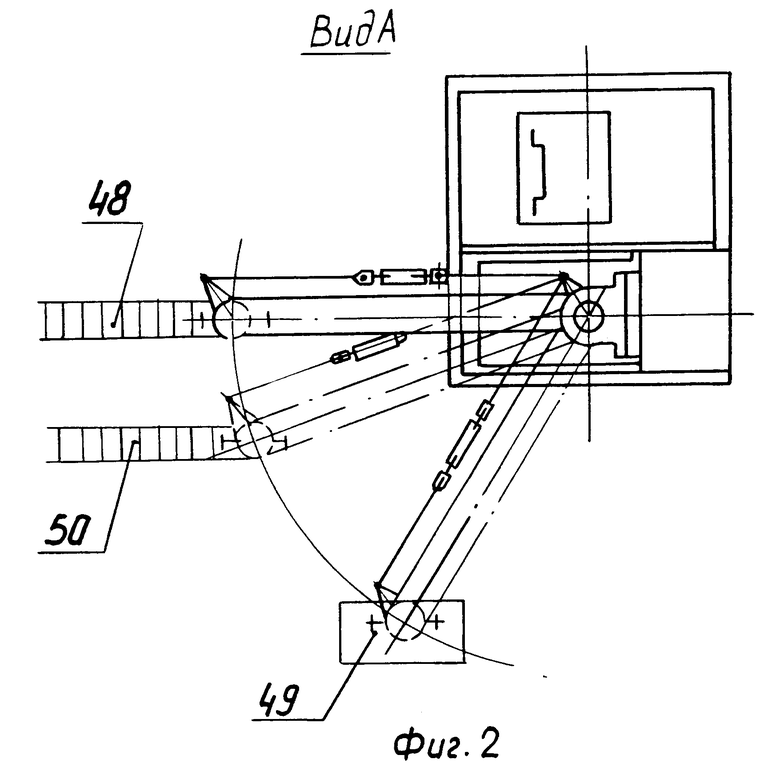
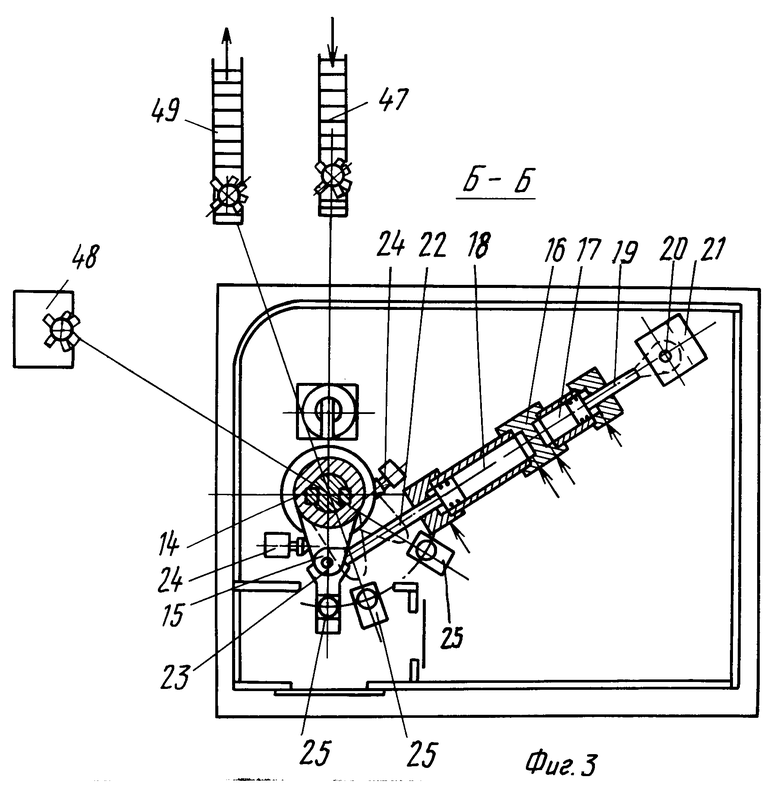
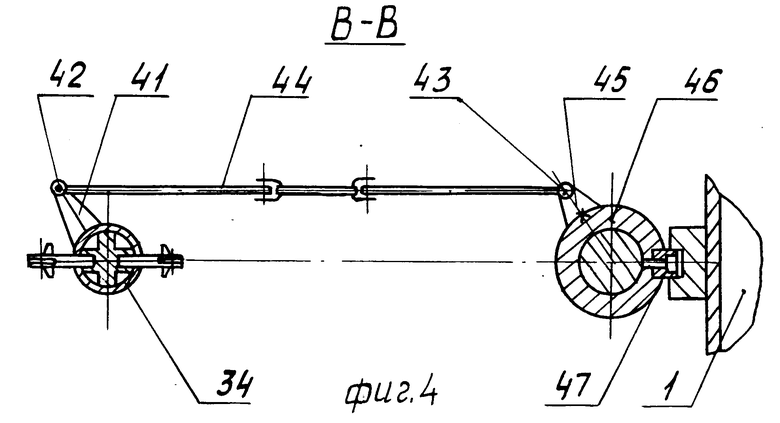
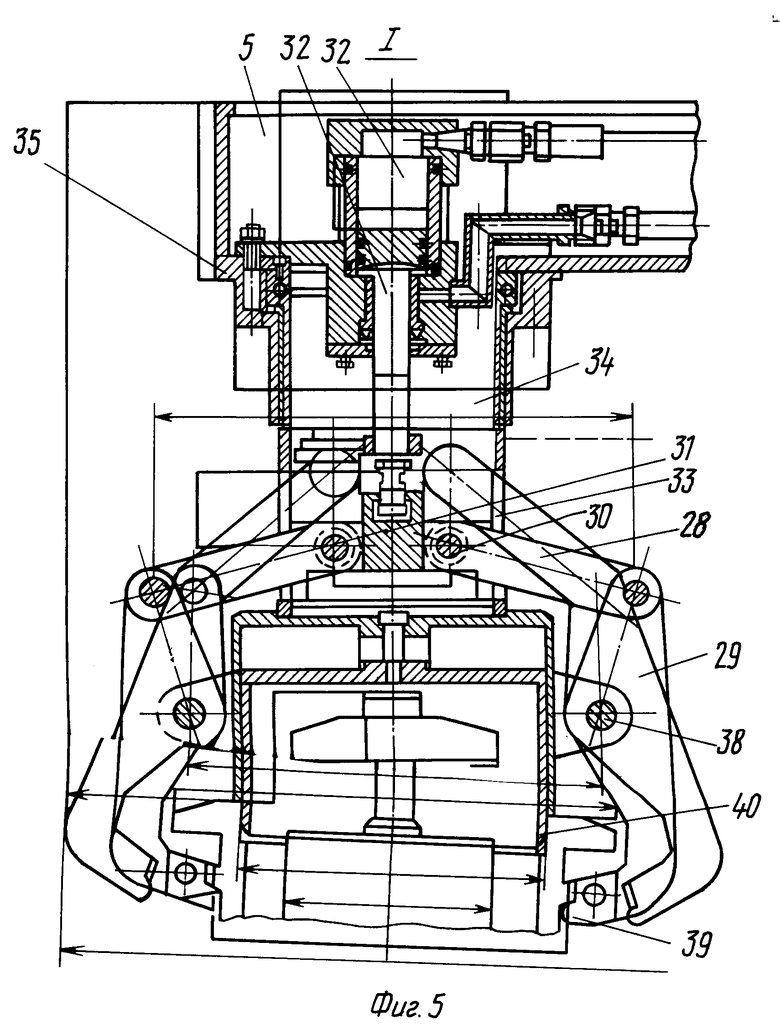
На фиг. 1 показан предлагаемый манипулятоp, общий вид; на фиг.2 вид по стрелке А на фиг. 1; на фиг.3 разрез Б-Б на фиг.1; на фиг.4 разрез В-В на фиг.1; на фиг.5 узел I на фиг.1.
Манипулятор содержит основание 1, на котором посредством подшипников 2 и 3 смонтирован вал 4 с механической рукой 5 и механизмами ее подъема и поворота. Вал 4 состоит из двух частей 6 и 7, имеющих шлицевое соединение.
Механизм подъема содержит силовой цилиндр 8, который посредством шарнира 9 связан с основанием 1, а шток 10 через шарнир 11 соединен с проушиной 12 втулки 13, обеспечивающей соединение частей 6 и 7 вала 4.
Механизм поворота включает втулку 14 с рычагом 15 и двухкамерный силовой цилиндр 16. Последний состоит из правой 17 и левой 18 камер. Шток 19 камеры 17 установлен посредством шарнира 20 на стойке 21, закрепленной на основании 1. Шток 22 камеры 18 посредством шарнира 23 через рычаг 15 соединен с втулкой 14, жестко связанной с валом 4. На основании 1 установлены упоры 24 и датчики 25.
Механическая рука 5 содержит захват 26, снабженный механизмом 27 автоматической ориентации. Захват 26 выполнен в виде шарнирно соединенных между собой рычагов 28 и 29. Рычаг 28 посредством шарнира 30 связан с подвижной втулкой 31, соединенной с гидроприводом 32. Рычаги 28 подвижно размещены в пазах 33 корпуса 34 захвата, установленного с возможностью поворота относительно корпуса 35 руки 5. Привод 32 захвата размещен в корпусе 35 механической руки. Двуплечий рычаг 29 с помощью шарнира 38 соединен с корпусом 34 и снабжен установленными с возможностью качания губками 39. В корпусе 34 размещена подпружиненная втулка 40 для ориентации деталей.
Механизм автоматической ориентации захвата содержит рычаг 41, жестко связанный с подвижным корпусом 34, и посредством шарниров 42 и 43 и регулируемой тяги 44 соединен с рычагом 45, жестко связанным с кольцом 46. Кольцо 46 через шпонку 47 соединено с основанием 1 и установлено с возможностью вертикального перемещения вместе с камерой 7 вала 4.
Работает предлагаемый манипулятор следующим образом.
В исходном положении механическая рука 5 находится над конвейером 48 загрузки 4. При этом шток 10 силового цилиндра 8 и соответственно механическая рука 5 находятся в крайнем верхнем положении, а шток 22 силового цилиндра 16 и его корпус в крайнем левом положении.
Двуплечие рычаги 29 с зажимными губками 39 захвата 26 разведены и шток гидропривода 32 находится в крайнем верхнем положении.
Подается команда на захват изделия и снятие его с конвейера 48 загрузки 4. При этом шток 10 силового цилиндра 8 опускается вниз и опускает механическую руку. Подпружиненная втулка 40 центрирует изделие и при срабатывании концевого выключателя, определяющего наличие изделия, дается команда гидропривода 32 на зажим изделия. Шток гидропривода 32 вместе с направляющей втулкой 31 перемещается вниз и двуплечие рычаги 29 губками 39 зажимают изделие.
После зажима изделия срабатывают концевые выключатели и дается команда силовому цилиндру 8 на подъем механической руки 5 вместе с изделием. В конце хода штока 10 дается команда силовому цилиндру 16 на поворот механической руки на загрузочную позицию 49 станка для чего жидкость подается одновременно в штоковые полости камер 17 и 18. Шток 22 и корпус 16 находятся в крайнем правом положении.
Затем дается команда силовому цилиндру 8 на опускание механической руки 5 в зоне загрузочной позиции станка. После опускания дается команда гидроприводу 32 на разжим изделий, для чего жидкость подается в его штоковую полость.
Выгрузка изделия, опускание механической руки 5 и разжим захвата производятся аналогично.
После обработки изделие снимается со станка и переносится манипулятором на разгрузочный конвейер 50, для чего жидкость подается в штоковую камеру 18.
После выгрузки изделия на конвейер 50 и подъема механической руки в крайнее верхнее положение дается команда гидроцилиндру 16 на поворот ее в зону 48 загрузки, для чего жидкость подается во внештоковую камеру 17.
Цикл повторяется.
Ввиду сложной конфигурации изделия и ее несимметричности на позициях загрузки, выгрузки и загрузочной станка изделие должно находиться в строго ориентированном первоначальном положении, что обеспечивается следующим образом. При повороте манипулятора кольцо 46 остается неподвижным и так как длина тяги 44 постоянная, подвижная часть захвата поворачивается вместе с изделием, сохраняя свое первоначальное ориентированное положение.
Заявляемый манипулятор обеспечивает следующие преимущества: ориентированное первоначальное положение изделия во всех точках позиционирования; упрощение конструкции за счет расположения силового цилиндра механизма поворота в одной плоскости с основанием.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для обработки отверстий в крупногабаритных деталях | 1989 |
|
SU1708540A1 |
| Роторный автомат для объемной штамповки стержневых изделий | 1990 |
|
SU1803337A1 |
| Захватное устройство | 1991 |
|
SU1816688A1 |
| Устройство для сборки и рельефной сварки тела вращения с шипами | 1985 |
|
SU1294550A1 |
| Манипулятор | 1985 |
|
SU1315299A1 |
| Бухтосъемный манипулятор трубоволочильного стана с вертикальным барабаном | 1983 |
|
SU1168310A1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Магазин-накопитель деталей | 1986 |
|
SU1366354A1 |
| Установка для изготовления биметаллических деталей | 1982 |
|
SU1069941A1 |
| Устройство для выдачи и ориентации штучных заготовок | 1987 |
|
SU1479178A1 |
Изобретение относится к машиностроению и обеспечивает ориентированное положение захвата с изделием во всех точках позиционирования. Захват снабжен механизмом автоматической ориентации, выполненным в виде жестко связанного с подвижным корпусом захвата рычага, шарнирно соединенного посредством регулируемой тяги с рычагом, который жестко закреплен на кольце, свободно размещенном на валу механической руки и установленном на нем с возможностью осевого перемещения. Корпус захвата установлен с возможностью поворота относительно корпуса механической руки. 1 з.п. ф-лы, 5 ил.
| Промышленный робот | 1985 |
|
SU1293013A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
