Изобретение относится к погрузочно разгрузочным устройствам, а именно к мани пуляторам, установленным на шасси шахтных транспортных машин (безрельсовых, монорельсовых, рельсовых), используемых в основном для погрузки грузов, монтажных работ, возведения крепи и т д. в шахте.
Цель изобретения - повышение надежности и снижение материалоемкости.
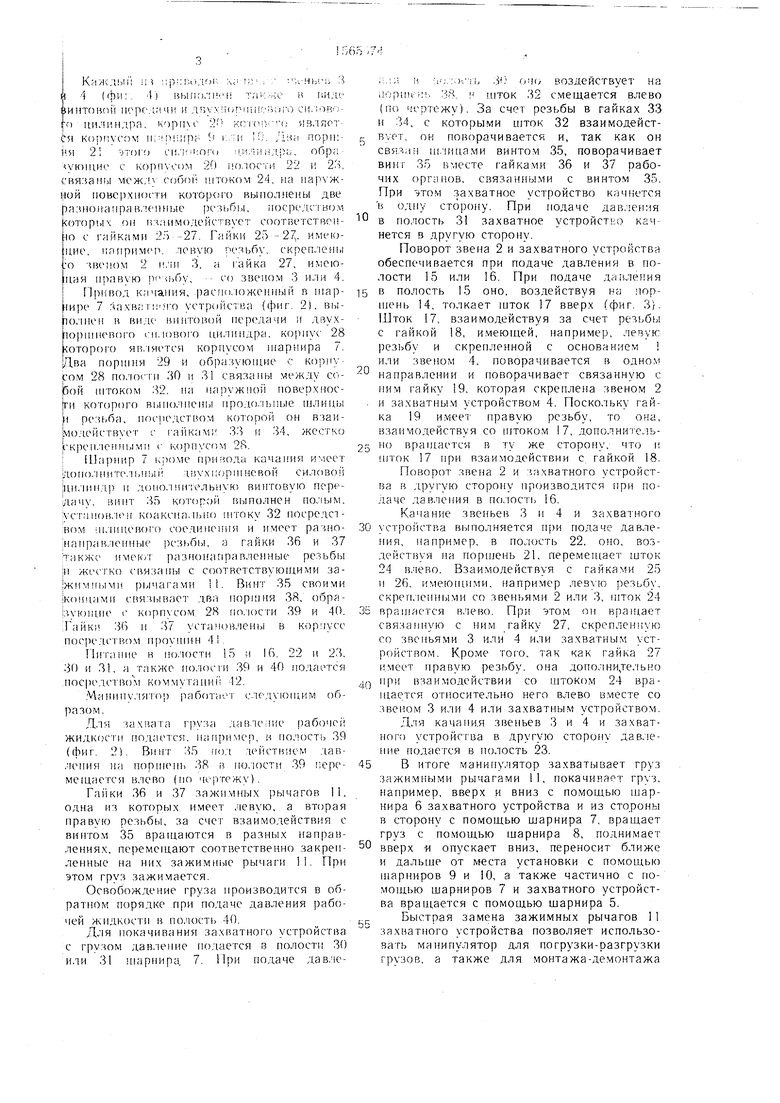
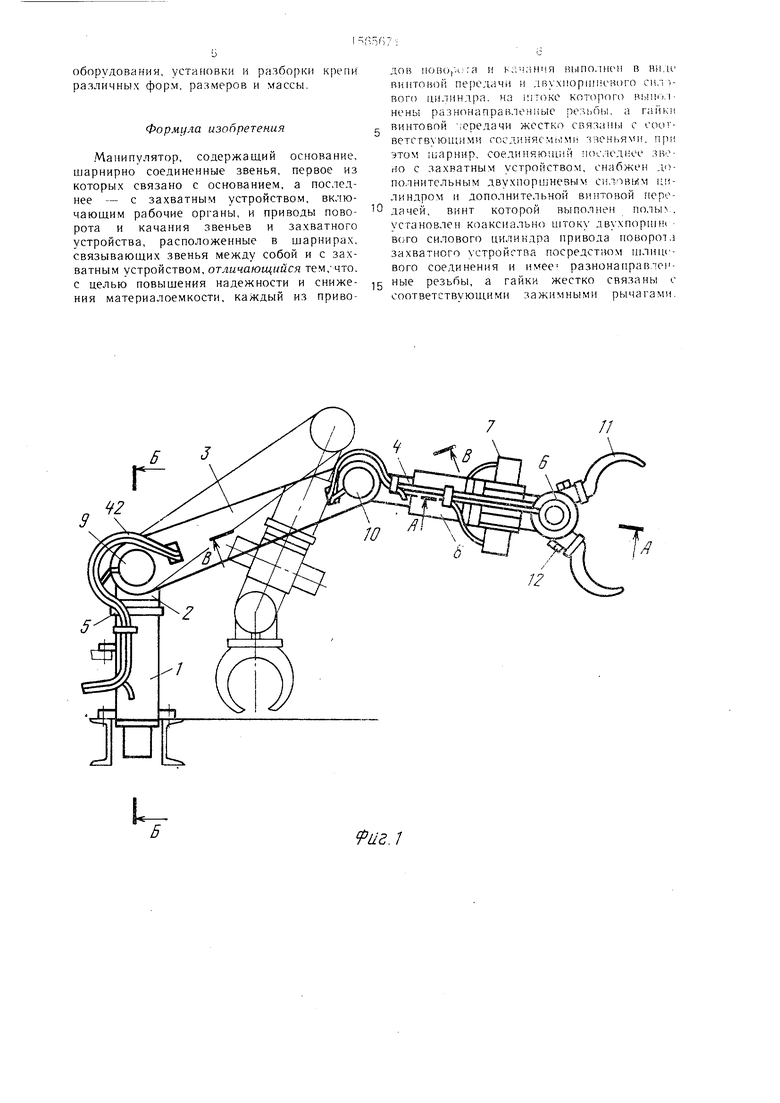
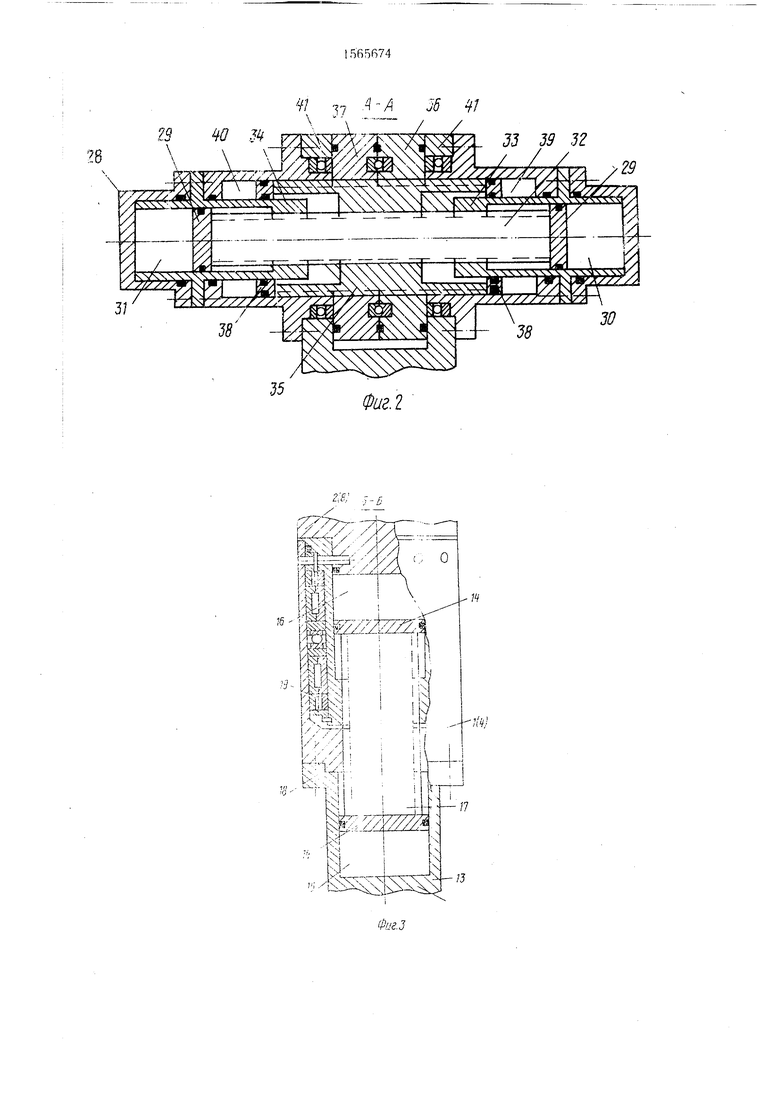
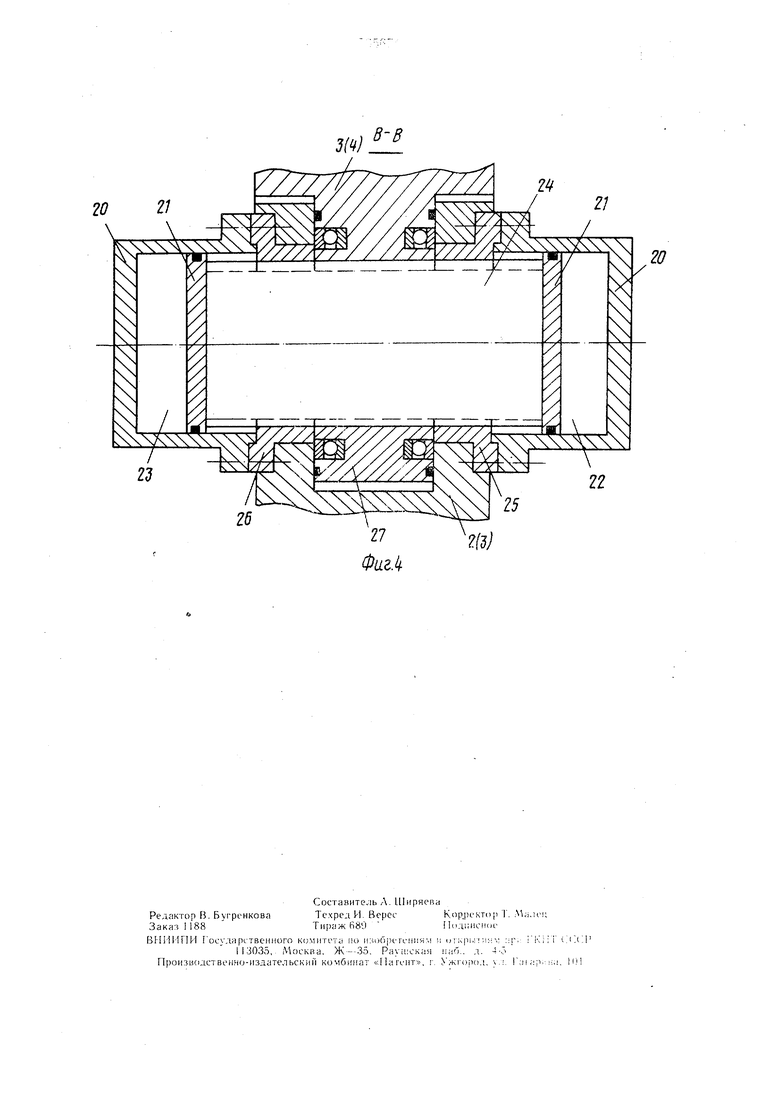
На фиг 1 изображен манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1, на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг 1.
Манипулятор состоит из основания 1, которое можно устанавливать на шасси транспортной машины, шарнирно соединенных звеньев 2-4, перчое (звено 2) установлено на основании 1 посредством шарнира 5, включающего привод поворота звена 2 относительно его оси, а последнее (звено 4) связано с захватным устройством посредством шарниров 6-8, в первых из которых размещены приводы качания захватного устройства в двух взаимно перпендикулярных плоскостях, а в последнем - привод поворота захватного устройства. Звенья 2-4 связаны между собой шарни ами 9 и 10, в которых размещены приводы качания соответственно звеньев 3 и 4
Захватное устройство имеет зажимные рычаги 11, которые в зависимыми о. формы, размеров и массы груза выпо-шлются различной конфигурации и крепягсч посредством болтов 12.
Приводы поворот,: звена 2 и захватного устройства (фиг 3) выполнены R ви де винтовых передач и двухпоршневых силовых цилиндров, корпуса 13 которых являются корпусами шарниров 5 и 8 Каждый из приводов поворота имеет два поршня 14, образующие с корпусом 13 полости 15 и 16 и связанные штоком 17. на поверхности которого выполнены две разнонаправленные резьбы, посредством ко торых он взаимодействует соответственно с гайками 18 и 19. Гайки 18 винтовых передач приводов поворота, имеющие, например, левую резьбу, скреплены соответственно с основанием 1 и звеном 4, а гайки 19, имеющие правую резьбу, -- соответственно со звеном 2 и захватным стронет лом (с корпусом шарнира 7)
сд
OS
ч
„aJk.
Каждый ,ч -р-вид-я и 4 (фн- I) вы полис винтовой пере и
ГО НИДННДра. КОрПМ
ся корпчсом ..;;p;i ( 1
НЯ 21 -МО О , 1 I О. i
зующие с 1чорп сом 20
- Ч НгА, Ч -.0 В ВИЛС
Ki,-о С МОв-)-(. Я3.1ЯОТ
Два пори:- . Hi ндр;. обр;; полости 22 и 2л
связаны межд гобои штоком 24. на наружной поверхности которого выполнены две разнонаправленные резьбы, посре;км вом которых он взаимодействует соответственно с гайками 25 -27. Ганки 25-27,. имеющие, например тевую резьбу, скреплены со звеном 2 . in 3, а гайка 27, имеющая правую р мьбу, - со эвеном 3 или 4.
Привод качания, расположенный и шарнире 7 захв.ми чо устройства (фиг. 2). выполнен в виде винтовой передами и двух- порпшевого сп ювого цилиндра, корпус 28 которого является корпусом шарнира 7 Два поршня 29 и образующие с корт- сом 28 полос i и 30 и 3 связаны между собой т гоком 32. па наружной поверхности которого выполнены продольные шлицы и резьба, посредством которой он взаимодействует с 1анкамп 33 i 34. жестко скрепленными с 28.
Шарнир 7 кроме привода качания имеет дополнительный ШУХ поршне вой силовой нилннчр и донолнн.) винтовую передачу, винт 35 которой выполнен полым, установлен коакспа ihim штоку 32 посредством шлицевого соединения и имеет разнонаправленные резьбы, а гайки 36 и 37 1пкжс разнонаправленные речьбы н жестко связаны с соответствующими зажимными рычагами 11. Винт 35 своими кочнами свяшваст два поршня 38, образующие с корпусом 28 полости 39 и 40. Гайки 36 и 37 сташжлепы в посредством проушин 41
Питание в полости 15 и 16. 22 и 23. 30 и 31, а также полости 39 и 40 подается посредством комму а ни и 12.
Манипулятор работаем следующим образом.
Для захвата груза дашение рабочей жидкости подается, например, в полость 39 Винт 35 но i действием дав- поршень 38 в полости 39 пере(фш. лен и я
мешается влево (по чертежу).
Гайки 36 и 37 зажимных рычагов 11, одна из которых имеет левую, а вторая правую резьбы, за счет взаимодействия с винтом 35 вращаются в разных направлениях, перемещают соответственно закрепленные на них зажимные рычаги 11. При этом груз зажимается.
Освобождение груза производится в обратном порядке при подаче давления рабочей жидкости в полость 40.
Для покачивания захватного устройства с грузом давление подается в полости 30 или 31 шарнира, 7. При подаче давле
0
5
0
5
0
5
0
5
. Л з , к-и, 3. очо воздействует на нории -I . :-: шток 32 смещается влево (по чертежу). За счет резьбы в гайках 33 и 34, с которыми шток 32 взаимодействует, он поворачивается и, так как он связан шлицами винтом 35, поворачивает вин г 35 вместе гайками 36 и 37 рабочих органов, связанными с винтом 35. При этом захватное устройство качнется в одну сторону. При подаче давления в полость 31 захватное устройство кач нется в другую сторону.
Поворот звена 2 и захватного устройства обеспечивается при подаче давления в полости 15 или 16. При подаче давления в полость 15 оно, воздействуя на поршень 14, толкает шток 17 вверх (фиг 3} Шток 17, взаимодействуя за счет резьбы с гайкой 18, имеющей, например, левую резьбу и скрепленной с основанием 1 или звеном 4. поворачивается в одном направлении и поворачивает связанную с ним гайку 19, которая скреплена звеном 2 и захватным устройством 4. Поскольку гайка 19 имеет правую резьбу, то она, взаимодействуя со штоком 17, дополнительно вращается в ту же сторону, что и шток 17 при взаимодействии с гайкой 18.
Поворот звена 2 и захватного устройства в другую сторону производится при подаче давления в полость 16.
Качание звеньев 3 и 4 и захватного устройства выполняется при подаче давления, например, в полость 22, оно, воздействуя на поршень 21, перемещает шток 24 влево. Взаимодействуя с гайками 25 и 26, имеющими, например резьбу, скрепленными со звеньями 2 или 3, шток 24 вращается влево. При этом он вращает связанную с ним гайку 27, скрепленную со звеньями 3 или 4 или захватным устройством. Кроме того, так как гайка 27 имеет правую резьбу, она дополнительно при взаимодействии со штоком 24 вращается относительно него влево вместе со звеном 3 или 4 или захватным устройством.
Для качани.я звеньев 3 и 4 и захват- ног; устройства в другую сторону давление подается в полость 23.
В итоге манипулятор захватывает груз зажимными рычагами 11, покачивает груз, например, вверх и вниз с помощью шарнира 6 захватного устройства и из стороны в сторону с помощью шарнира 7, вращает груз с помощью шарнира 8, поднимает вверх -и опускает вниз, переносит ближе и дальше от места установки с помощью шарниров 9 и 10, а также частично с помощью шарниров 7 и захватного устройства вращается с помощью шарнира 5.
Быстрая замена зажимных рычагов 11 захватного устройства позволяет использовать манипулятор для погрузки-разгрузки грузов, а также для монтажа-демонтажа
оборудования, установки и разборки крепи различных форм, размеров и массы.
Формула изобретения
Манипулятор, содержащий основание, шарнирно соединенные звенья, первое из которых связано с основанием, а последнее - с захватным устройством, включающим рабочие органы, и приводы поворота и качания звеньев и захватного устройства, расположенные в шарнирах, связывающих звенья между собой и с захватным устройством, отличающийся тем, что. с целью повышения надежности и снижения материалоемкости, каждый из приво
дов пови, :а и качания выполнен в вь U винтовой передачи и дву поршпг ого сил - во го цилиндра, на штоке которого иьпч i йены разнонаправленные ре5ьоы. а гайки винтовой средами жестко связаны с соответствующими соединяемыми звеньями, при этом шарнир, соединяющий последнее зво- rio с захватным устройством, снабжен дополнительным двухпоршнезым силовым цилиндром и дополнительной винтовой перс- дачей, вннт которой выполнен полы- , установлен коаксиально штоку двухпоршш вого силового цилиндра привода поворот.) захватного устройства посредстпом шлинг- вого соединения и имее разнонапрате - ные резьбы, а гайки жестко связаны с соответствующими зажимными рычагами
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1982 |
|
SU1060469A1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Адаптивное захватное устройство | 1986 |
|
SU1399114A1 |
| Захватное устройство | 1986 |
|
SU1323371A1 |
| Манипулятор | 1981 |
|
SU1007960A1 |
| Захватное устройство | 1985 |
|
SU1283092A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Схват манипулятора | 1983 |
|
SU1104018A1 |
| Манипулятор | 1974 |
|
SU503710A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
Изобретение относится к погрузочно-разгрузочным устройствам, а именно к манипуляторам, установленным на шасси шахтных транспортных машин и используемым для погрузки грузов, монтажных работ, возведения крепи и т.д. в шахте. Целью изобретения является повышение надежности за счет снижения материалоемкости. Приводы качания поворота звена и захватного устройства выполнены в виде винтовых передач и двухпоршневых силовых цилиндров, корпуса которых являются корпусами шарниров. 4 ил.
ЦФиг. 1
37
4-AJ6 Щ
33 39 32 ///
29
30
Фаг. 2
-13
21
| Козырев Ю | |||
| Г | |||
| Промышленные роботы | |||
| Справочник | |||
| - М.: Машиностроение, 1983, с | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
