Изобретение относится к робототехнике, а именно к исполнительным органам роботов и манипуляторов.
Цель, изобретения - расширение технологических возможностей схвата за счет очувствления его к усилию захвата.
На чертеже изображен схват, общий вид.
Схват содержит губки 1 с приводом их перемещения (не показан), в которых выполнена полость, заполненная рабочей средой 2, при этом одна из стенок 3 полости со стороны рабочей поверхности губок выполнена из эластичного материала. Полость охвачена электрической обмоткой 4. Внутри полости каждой губки расположены вибратор 5, выполненный, например, в виде пьезоэлемента, связанного с источником электрической энергии (не показан), и электроды 6 для соединения рабочей среды с блоком 7 измерения активного сопротивления. Рабочая среда 2 образована смесью порощков нетокопроводного магнитопровод- ного материала и графита.
Схват работает следующим образом.
При сближении губок 1 схвата происходит захват детали 8 и деформация стенки 3 губок, которые принимают форму детали. При этом происходит уменьшение внутреннего объема полости и сжатие рабочей среды 2, что приводит к уменьщению электрического сопротивления графитового порошка пропорционально усилию захвата. Величина этого усилия определяется с помощью блока 7 измерения электрического сопротивления. Когда это усилие достигает необходимого значения, движение губок 1 прекращается и на электрические обмотки 4 подается напряжение, создающее электро- магнитное поле, в котором рабочая среда 2 затвердевает, надежно фиксируя деталь 8.
Для освобождения детали 8 губки 1 разводят и отключают обмотки 4, после чего включают вибраторы 5 для встряхивания рабочей среды, при этом губки принимают первоначальную форму.
)5
Формула изобретения
Схват манипулятора, содержащий губки, в которых выполнена полость, заполненная рабочей средой, одна из стенок которой со стороны рабочей поверхности губок
выполнена из эластичного материала, и электрическую обмотку, охватывающую полость, отличающийся тем, что, с целью расщире- ния технологических возможностей за счет очувствления к усилию захвата, он снабжен блоком измерения электрического сопротивления и установленными в полости каждой губки вибратором и электродами для соединения рабочей среды с блоком измерения, а рабочая среда образована смесью порощков нетокопроводного магнитопровод- ного материала и графита.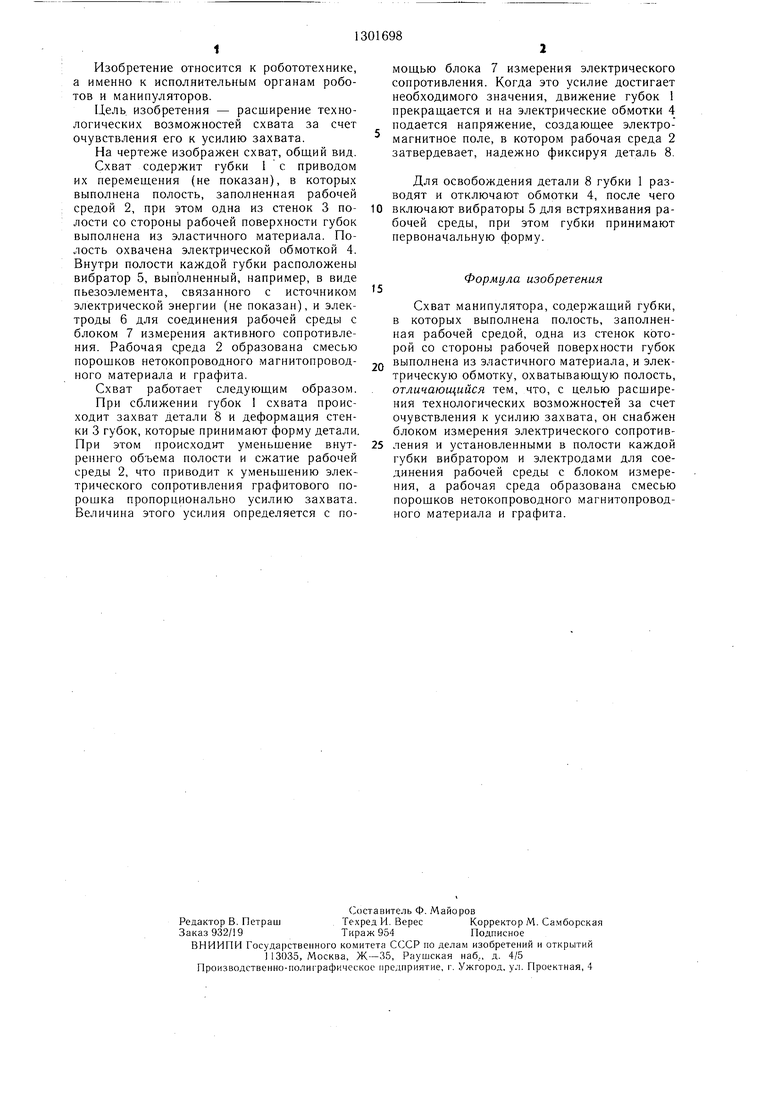
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват очувствленного робота | 1984 |
|
SU1232475A1 |
| Схват манипулятора | 1984 |
|
SU1271743A2 |
| Схват манипулятора | 1986 |
|
SU1351778A2 |
| Губка схвата | 1990 |
|
SU1815212A1 |
| Схват промышленного робота | 1986 |
|
SU1404336A1 |
| Очувствленный схват робота | 1986 |
|
SU1335449A1 |
| Очувствленный схват робота | 1986 |
|
SU1366392A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Очувствленный схват манипулятора | 1985 |
|
SU1309450A1 |
Изобретение относится к области робототехники, а именно к исполнительным органам роботов и манипуляторов. Целью изобретения является расширение технологических возможностей схвата за счет очувствления его к усилию захвата. При сближении губок 1 схвата происходит захват детали 8 и деформация стенки 3 губки, выполненной из эластичного материала. При этом сжимается рабочая среда 2, образованная смесью порошков нетокопроводного магнитопроводного материала и графита, что приводит к изменению электрического сопротивления графитового порошка пропорционально усилию захвата. Величина электрического сопротивления, а следовательно, и усилия захвата определяется блоком 7 измерения. При достижении требуемой величины усилия захвата обмотки 4, расположенные на губках 1, подключаются к источнику напряжения и создается электромагнитное поле, под действием которого рабочая среда затвердевает. После освобождения детали 8 включается вибратор 5, встряхивающий рабочую среду. 1 ил. (О (О оо О) :о 00
| Захват | 1977 |
|
SU629058A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
