1 . 1305033
Изобретение относится к машиностроению и Momet найти применение в металлорежущих станках, в частности в роботиэированных шлифовальных комплексах для автоматической загрузки- . 5 выгрузки обрабатываемых деталей,например подшипниковых колец.
Цель изобретения - повьшение надежности путем шунтирования остаточного магнитного потока магнитной сие- темы схвата.и расширение диапазона захватываемых объектов.
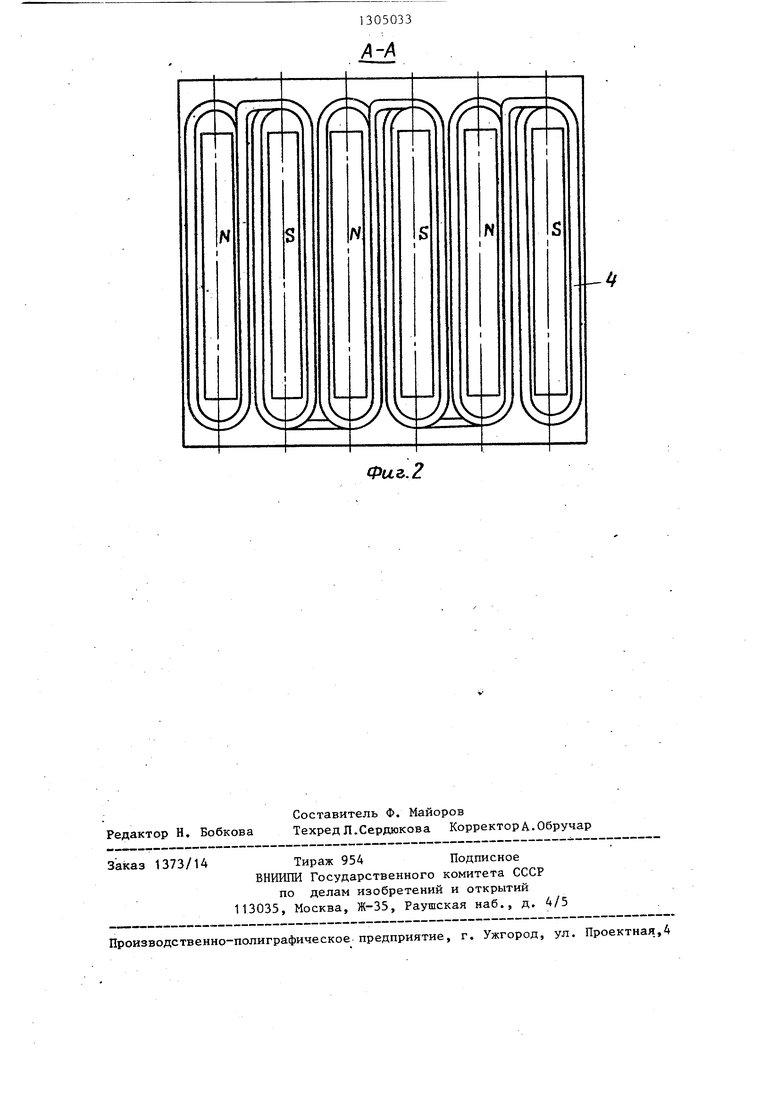
На изображен схват, общий вид в разрезеi на фиг.2 - сечение А-А на фиг.1.
Схват манипулятора содержит маг- нитопровод 1 с продольными пазами 2, образующими полюса 3. В пазы уложена обмотка, 4, распределенная так, что
J5
схвате, она Должна лежать на двух со седних полюсниках, т.е. габарит дета ли должен быть больше шага пазов.
Для транспортируемых деталей, га- барит которых больше шага между полю сами, длина пути рабочего магнитного потока и магнитное сопротивление оди наковы в любом месте расположения их на захвате. Следовательно, усилие притяжения для всех деталей,, транспортируемых захватов,одинаково.
При необходимости разгрузки захва та с обмотки 4 снимается напряжение Перемычка между пазами 6 является шунтом для остаточного потока, вслед ствие чего поток Фд разделяется на
два потока ф и ф Поток
не
проходит через деталь и не влияет на остаточное усилие, а оставшаяся час
полярности полюсов чередуются (фиг.2) 20 остаточного потока Ф - поток Ф ослабляется немагнитным покрытием рабочей поверхности плиты.
25 Формула изобретения
плиту 5 с несквознь ми продольными пазами б, отделяющими друг от друга полюсники, шнрийа которых больше ширины полюсов. Минимальная ширина па-
зов в блоке полюсников определяется допустимым рассеиванием рабочего потока через воздушный зазор паза. Блок полюсников закреплен на силовом блот ке так что пазы обращены к обмотке 4 сквата. Кроме того, рабочая поверх-3Q ность захвата покрыта тонким износостойким немагнитным слоем 7, например меднение 0,1-0,2 мкм и твердое хромирование 10-15 мкм. 1 Устройство работает следующим об- 35 разом,
Схват опускается рабочей поверхностью на слой деталей 8, подлежащих транспортированию, и на обмотку 4 подается напряжение.Рабочий магнитный 40 поток проходит между соседними полюсами 3 через перекрывающие их детали 8 и удерживает их на схвате. Для того, чтобы деталь удерживалась на
1.Схват манипулятора, содержащий электромагнит, имеющий полюса с чередующейся полярностью, и плиту,выполненную из магнитопроводного материала, имеющую пазы, расположенные
с шагом вдоль полюсов электромагнитов, и установленную со стороны этих полюсов, о тличающийся тем что, с целью повьш1ения надежности и расширения диапазона за.хватьгеаекв.1Х объектов, пазы в плите вьшолнены со стороны, обращенной к полюсам элек- трокагнитов, при этом шаг пазов равен шагу -полюсов электромагнита.
2.Схват по П.1, отличающ и и с .я тем, что плита со. стороны ее рабочей поверхности имеет иемагни топроводное, износостойкое покрытие
схвате, она Должна лежать на двух соседних полюсниках, т.е. габарит детали должен быть больше шага пазов.
Для транспортируемых деталей, га- барит которых больше шага между полюсами, длина пути рабочего магнитного потока и магнитное сопротивление одинаковы в любом месте расположения их на захвате. Следовательно, усилие притяжения для всех деталей,, транспортируемых захватов,одинаково.
При необходимости разгрузки захвата с обмотки 4 снимается напряжение. Перемычка между пазами 6 является шунтом для остаточного потока, вследствие чего поток Фд разделяется на
два потока ф и ф Поток
не
проходит через деталь и не влияет на остаточное усилие, а оставшаяся часть
остаточного потока Ф - поток Ф 1.Схват манипулятора, содержащий электромагнит, имеющий полюса с чередующейся полярностью, и плиту,выполненную из магнитопроводного материала, имеющую пазы, расположенные
с шагом вдоль полюсов электромагнитов, и установленную со стороны этих полюсов, о тличающийся тем,; что, с целью повьш1ения надежности и расширения диапазона за.хватьгеаекв.1Х объектов, пазы в плите вьшолнены со стороны, обращенной к полюсам элек- трокагнитов, при этом шаг пазов равен шагу -полюсов электромагнита.
2.Схват по П.1, отличающ и и с .я тем, что плита со. стороны ее рабочей поверхности имеет иемагни- топроводное, износостойкое покрытие.
XI-Д
Фиг. 2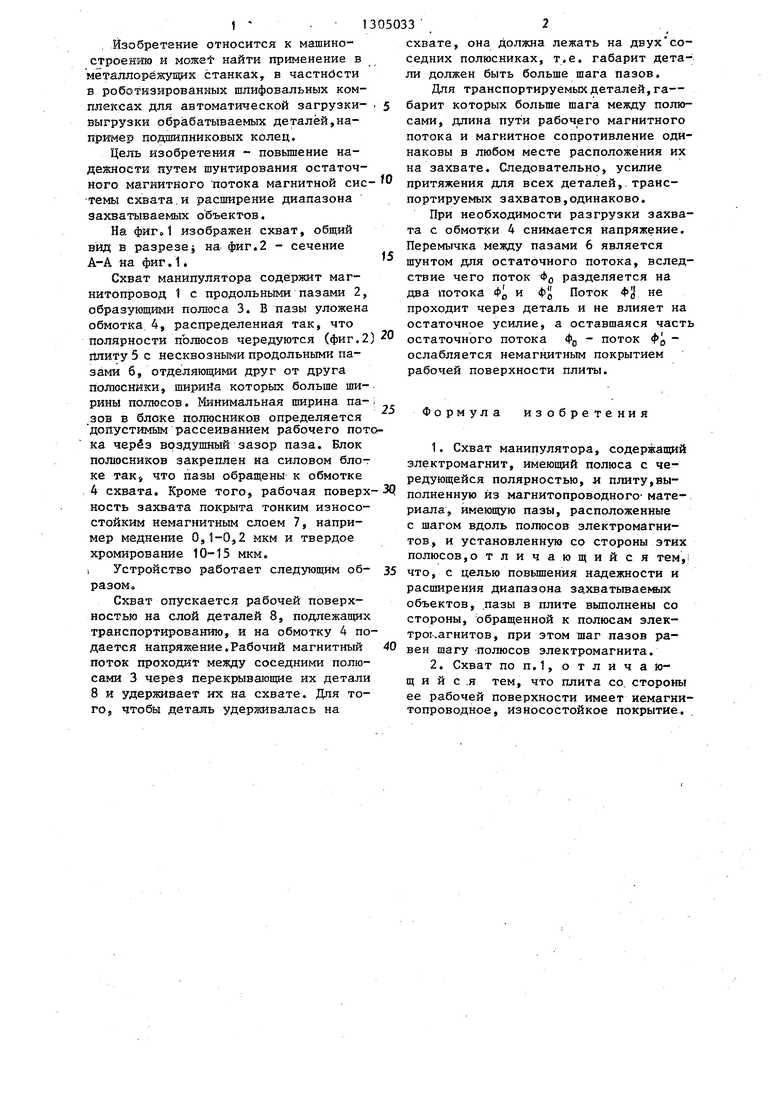
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1986 |
|
SU1316817A1 |
| Стыковочное устройство руки промышленного робота | 1990 |
|
SU1815216A1 |
| Схват манипулятора В.Г.Вохмянина | 1988 |
|
SU1627402A1 |
| Магнитная плита | 1991 |
|
SU1816633A1 |
| Схват манипулятора | 1983 |
|
SU1139623A1 |
| МАГНИТНОЕ ПОДЪЕМНОЕ УСТРОЙСТВО | 1991 |
|
RU2014279C1 |
| Электромагнитный схват | 1990 |
|
SU1798187A1 |
| Схват | 1985 |
|
SU1311928A1 |
| Электромагнитная плита | 1977 |
|
SU973294A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1761461A1 |
Изобретение относится к области машиностроения и может найти применение в металлорежущих станках, в частности в роботизированных шлифовальных комплексах для автоматической загрузки-выгрузки обрабатываемых деталей, например, подшипниковых колец. Целью изобретения является повышение надежности путем шунтирования остаточного магнитного потока магнитной системы схвата. При подаче напряжения на обмотку 4 рабочий магнитный поток проходит между соседними полюсами 3 через перекрывающие их детали 8 и удерживает их на схвате. При разгрузке схвата с обмотки 4 снимают напряжение, при этом перемычка между лазами 6 является шунтом для остаточного потока, что способствует отделению детали 8.1 з.п. ф-лы, 2 ил. сл со о СП О со со
| Константинов О.Я | |||
| Магнитная технологическая оснастка | |||
| - Л.: Машиностроение, 1974, с | |||
| Катодное реле | 1918 |
|
SU159A1 |
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
