1
Изобретение относится к машиностроению, к устройствам для выполнения вспомогательных операций, связанных с изменением положения изделий и деталей в пространстве, а конкретно к захватным устройствам манипуляторов .
Целью изобретения является повышение надежности работы.
На фиг. 1 изображено захватное устройство; на фиг. 2 - то же, пример выполнения с несколькими меха- Itизмa ш .:
Захватное устройство (фиг. 1)
содержит корпус 1 цилиндрической формы, заканчившо1ч;ийся конической опорной поверхностью 2, являющейся опорной поверхностью спиральной пру- Ж1-Н1Ы 3 механизмг зажима, выполненной в своем сечении конической формы, наружный конец которой крепится в корпусе 1. Внутренний конец пружины 3 закреплен на конической поверхности дополнительного элемента 4, установленного с помощью направляющего квадрата 5 с возможностью осевого перемещения в стержне б привода поворота пружины 3, и подпружинен относительно него прулсиной 7. Стержень 6 установлен в корпусе 1 с помощью резьбовой втулки 8 с возможностью его поворота с ограничением по углу с помощью штифтов 95 стержня 6 и корпуса 1. Корпус 1 и стержень 6 заканчиваются рукоятками 10 и 11 для их относ1 тельного по7зорота.
15
20
25
40
45
Захватное устройство (фиг. 2) содержит две или несколько спиральных пружин 3,, разнесенных вдоль закрепляемой детали и расположенных в корпусе 12,13. Привод пружин 3 выполнен в виде цилиндрических втулок 14 с опорными коническими поверхностями для внутреннего конца пружин 3, установленных в полом цилрпщрическом корпусе 12,13 с помощью ограничительных штифтов 15 и продольных пазов под них в стенке корпуса, поджатых к внутренним концам пружин 3 относи- 50 тельно корпуса пружинами 16. Стержень полой форм111 17 обеспечивает поворот верхней втулки 14. Втулки 18,19, поворотно одетые на корпус 12, обеспечивают поворот нару: сного конца ниж- ней пружины 3. Втулки 18,19 с помощью штифта 20 кинематически связаны со стерж -1ем 17, жестко или с помощью секторного паза, а также с помощью
12830972
подпружиненного шарика 21 ступенчато могут фиксироваться на корпусе 12. Рукоятки 22 и 23 соответственно закреплены на стержне 17 и корпусе
5 12 и обеспечивают относительный пов( рот концов пружин 3 зажимного механизма.
Работа захватного устройства осуществляется следующим образом.
0 В исходном положении захватного устройства спиральные пружины 3 зажимного механизма находятся в раскрученном положении, при котором внутренний диаметр внутренних витков пружины несколько больше наружного диаметра закрепляемой детали 24,25, что в свою очередь обеспечивается раскручиванием внутренних витков пружины 3 по отношению ее наружньк витков относительным поворотом рукояток 10,11,22,23 стержней 16,17 относительно корпуса 1,12.
Далее схват своими пружинами 3 одевается на закрепляемую деталь 24, 25 и обратным поворотом рукояток 10, 11,22,23 производят относительное закручивание витков пружины 3 обратным поворотом стержня 6,17 привода дополнительного элемента 4, втулок 14 до соприкосновения внутренних витков 3 с наружной поверх-г ностью закрепляемой детали 24-, 25, как это показано на фиг. 1.2. При этом пружины 7,16 через дополнитель35 ный элемент 4, втулки 14 поджимают витки пружины 3 до их соприкосновения за счет осевого перемещения последних, а также до упора наружного конца пружины в опорную поверхность 2 корпуса 1 с некоторьм осевым перемещением всей пружины 3 (отверстие крепления нарзокного конца пружины 3 имеет продолговатую форму). Для снятия захватного устройства с детали 24,25 обратным поворотом рукояток 10,11,22,23 производят обратное рас- ручивание внутренних витков пружины 3 до образования ими диамет ра, несколько большего наружного диаметра закрепляемой детали.
Использование изобретения позволяет повысить надежность в работе и упростить конструкцию схвата манипулятора.
30
Формула изобретения
Захватное устройство, содержащее корпус, в котором закреплена своим
Формула изобретения
Захватное устройство, содержащее корпус, в котором закреплена своим
наружным витком спиральная пружина из плоской ленты, внутренний виток которой связан с поворотным приводным элементом, отличающее- с я тем, что, с целью повьшения надежности устройства в работе, оно :снабжено дополнительным элементом.
.установленным с возможностью осевого перемещения на приводном поворотном элементе и подпружиненным относительно него, причем пружина выполнена конической и ее внутренний виток закреплен на конической наружной поверхности дополнительного элемента.
25
22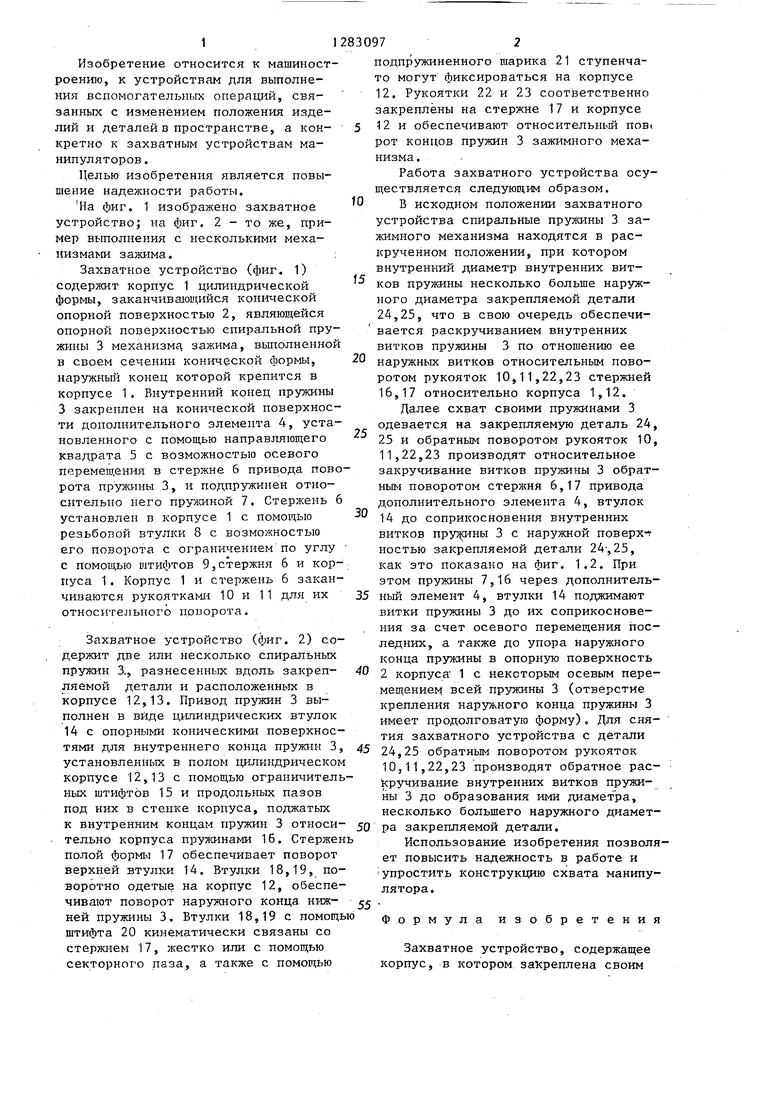
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1986 |
|
SU1351775A2 |
| Захватное устройство | 1987 |
|
SU1498610A1 |
| Схват манипулятора | 1984 |
|
SU1222539A1 |
| Захватная головка манипулятора | 1978 |
|
SU667397A1 |
| Захватное устройство | 1990 |
|
SU1754617A1 |
| Захватное устройство | 1984 |
|
SU1268402A1 |
| Захватное устройство | 1985 |
|
SU1303404A1 |
| РУЧКА ДЛЯ МЕБЕЛИ | 2008 |
|
RU2485876C2 |
| Захватное устройство | 1988 |
|
SU1535716A1 |
| Ручной инструмент для односторонней клепки составными заклепками | 1984 |
|
SU1348052A1 |
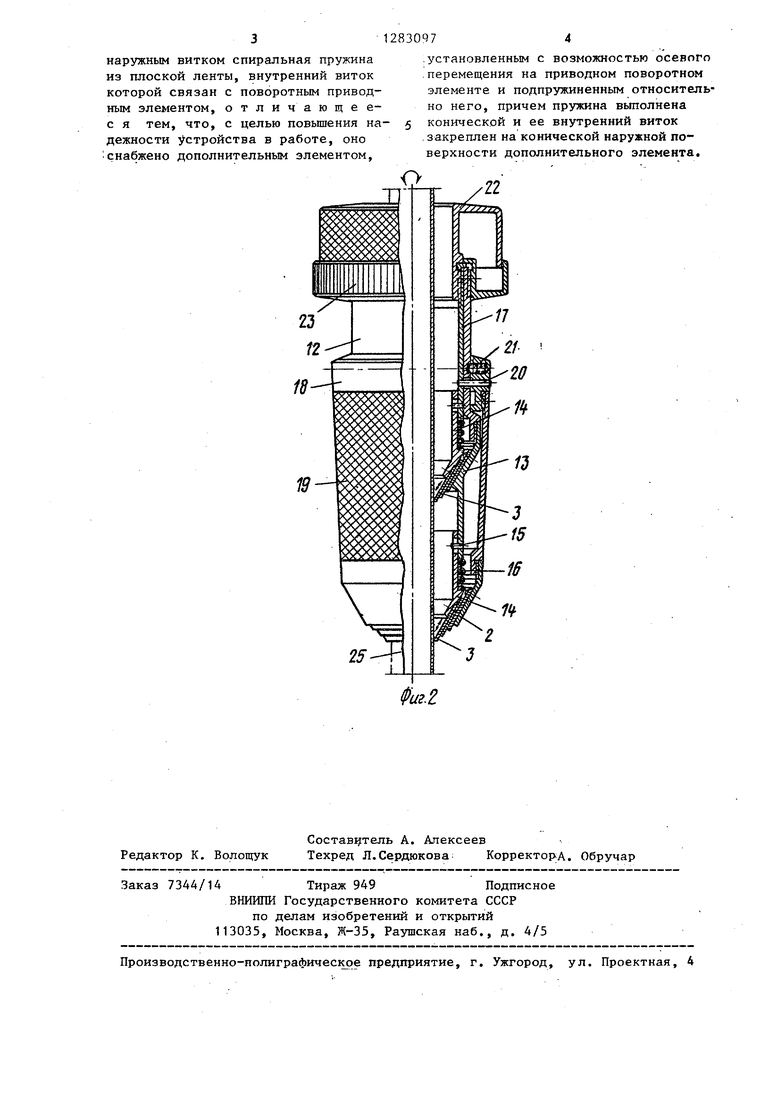
Изобретение относится к области машиностроения, к захватным устройствам манипуляторов. Изобретение позволяет повысить надежность работы. При повороте приводного элемента 6 происходит закручивание витков пружины 3 до касания внутренним витком наружной поверхности захватываемой детали. Витки пружины поджимаются друг к другу дополнительной пружиной 7. Наружный виток пружины закреплен на конической поверхности 2 корпуса 1. 2 Ш1. сл д х 2ff Фиг.1
Редактор К. Волощук
Состав1 тель А. Алексеев
Техред Л.Сердюкова Корректор.А. Обручар
Заказ 7344/14 Тираж 949Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Захватная головка манипулятора | 1978 |
|
SU667397A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
