Изобретение относится к области машиностроения и может быть использовано в качестве захватного устройства манипулятора для деталей, обладающих малмм весом и невысокой механической прочностью, при захвате их по наружным и внутренним поверхностям.
Целью изобретения является повышение надежности за счет устранения возможности повреждения деталей из хрупких материалов.
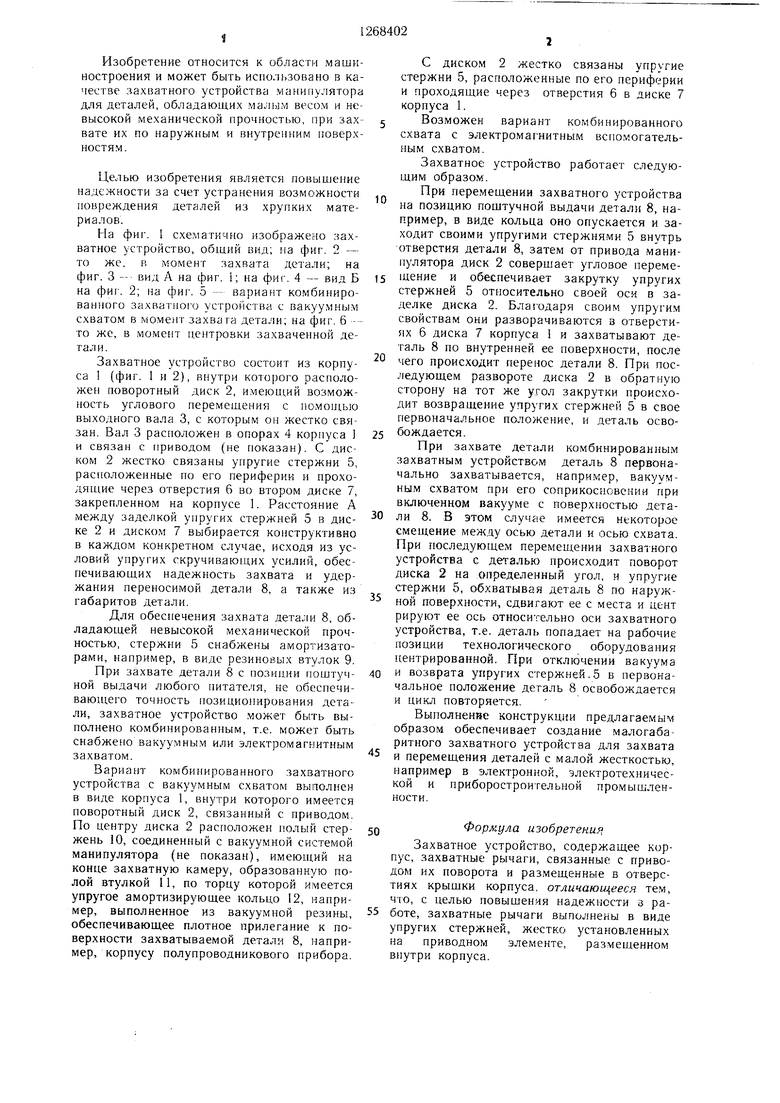
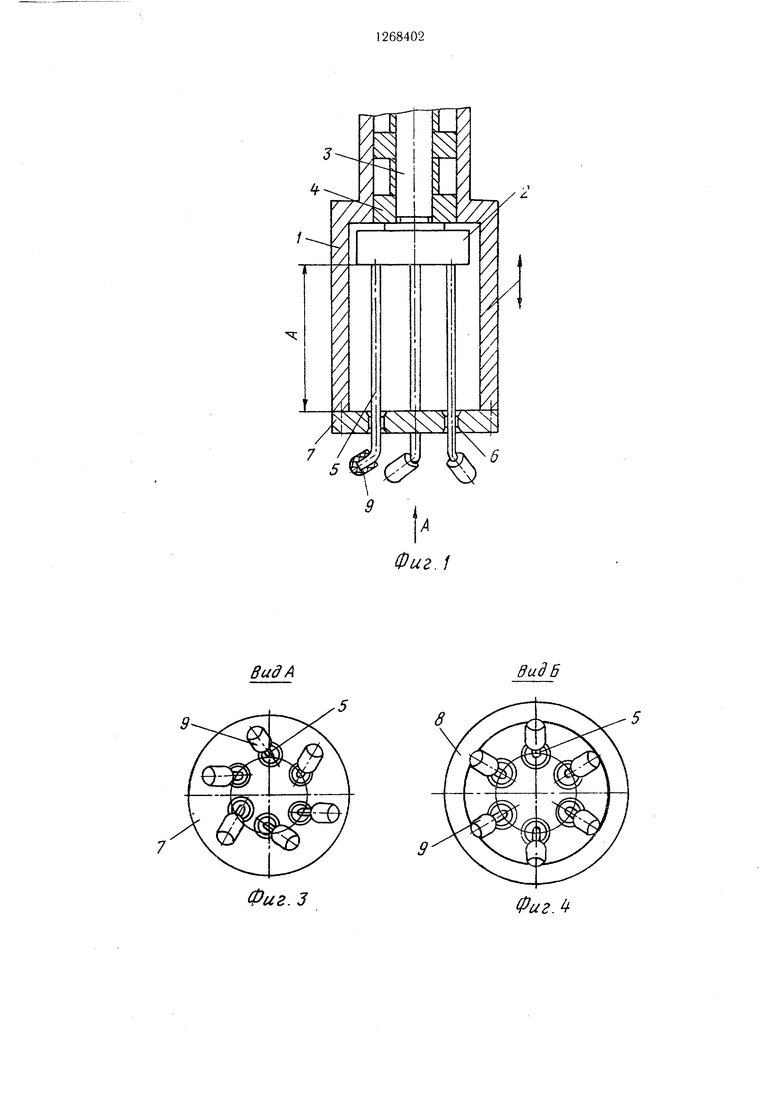
На фиг. 1 схематично изображено захватное устройство, общий вид; на фиг. 2 - то же. в момент захвата детали; на фиг. 3 -- вид А на фиг. 1; на фиг. 4 - вид Б на фиг. 2; на фиг. 5 -- вариант комбинированного захватного устройства с вакуу.мным схватом в момент захвата детали; на фиг. 6 -то же, в момент це} тровки захваченной детали.
Захватное устройство состоит из корпуса 1 (фиг. 1 и 2), внутри которого расположен поворотный диск 2, имеюншй возможность углового перемещения с 11омоп1.ыо выходного вала 3, с которым он жестко связан. Вал 3 расположен в опорах 4 корпуса ) и связан с приводом (не показан). С диском 2 жестко связаны упругие стержни 5, расположенные по его периферии и проходящие через отверстия б во втором диске 7, закрепленном на корпусе 1. Расстояние А между заделкой упругих стержней 5 в диске 2 и диском 7 выбирается конструктивно в каждом конкретном случае, исходя из условий упругих скручивающих усилий, обеспечивающих надежность захвата и удержания переносимой детали 8, а также из габаритов детали.
Для обеспечения захвата детали 8, обладающей невысокой механической прочностью, стержни 5 снабжены амортизаторами, например, в виде резиновых втулок 9.
При захвате детали 8 с позиции поштучной выдачи любого питателя, не обеспечивающего точность позиционирования детали, захватное устройство может быть выполнено комбинированным, т.е. может быть снабжено вакуумным или электромагнитным захватом.
Вариант комбинированного захватного уетройства с вакуумным схватом выполнен в виде корпуса 1, внутри которого имеется поворотный диск 2, связанный с приводом. По центру диска 2 расположен полый стержень 10, соединенный с вакуумной системой манипулятора (не показан), имеющий на конце захватную камеру, образованную полой втулкой 11, по торцу которой имеется упругое амортизирующее кольцо 12, например, выполненное из вакуумной резины, обеспечивающее плотное прилегание к поверхности захватываемой детали 8, например, корпусу полупроводникового прибора.
С диском 2 жестко связаны упругие стержни 5, расположенные по его периферии и проходящие через отверстия б в диске 7 корпуса 1.
Возможен вариант комбинированного
схвата с электромагнитным вспомогательным схватом.
Захватное устройство работает следующим образом.
При перемещении захватного устройства на позицию пощтучной выдачи детали 8, например, в виде кольца оно опускается и заходит своими упругими стержнями 5 внутрь отверстия детали 8, затем от привода .манипулятора диск 2 совершает угловое переме5 щение и обеспечивает закрутку упругих стержней 5 относительно своей оси в заделке диска 2. Бла одаря своим упругим свойствам они разворачиваются а отверстиях б диска 7 корпуса 1 и захватывают деталь 8 по внутренней ее поверхности, после
чего происходит перенос детали 8. При последующем развороте диска 2 в обратную сторону на тот же угол закрутки происходит возвращение упругих стержней 5 в свое первоначальное положение, и деталь осво5 бождается.
При захвате детали комбинированным захватным устройством деталь 8 первоначально захватывается, например, вакуумным схватом при его соприкосновении при включенном вакууме с поверхностью дета0 ли 8. В этом случае и.меется некоторое смещение между осью детали и осью схвата. При последующем перемещении захватного устройства с деталью происходит поворот диска 2 на определенный угол, и упругие стержни 5, обхватывая деталь 8 по наружной поверхности, сдвигают ее с места и цент рируют ее ось относительно оси захватного устройства, т.е. деталь попадает на рабочие позиции технологического оборудования центрированной. При отключении вакуума
0 и возврата упругих стержней.5 в первоначальное положение деталь 8 освобождается и цикл повторяется.
Выполнение конструкции предлагаемым образом обеспечивает создание малогабаритного захватного устройства для захвата и перемещения деталей с малой жесткостью, например в электронной, электротехнической и приборостроительной про.мыщленности.
Формула изобретения
Захватное устройство, содержащее корпус, захватные рычаги, связанные: с приводом их поворота и размещенные в отверстиях крыщки корпуса, отличающееся тем, что, с целью повышения надежности з работе, захватные рычаги выполнены в виде упругих стержней, жестко установленных на приводном элементе, размещенном внутри корпуса.
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1987 |
|
SU1430264A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2091208C1 |
| Схват манипулятора | 1985 |
|
SU1315304A1 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
| Схват манипулятора | 1980 |
|
SU905064A1 |
| Сборочно-захватное устройство | 1987 |
|
SU1468743A1 |
| Схват робота | 1987 |
|
SU1502299A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| Схват манипулятора | 1977 |
|
SU810479A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1761461A1 |
Изобретение относится к машиностроению и может быть использовано в качестве захватных устройств манипуляторов. Целью изобретения является повышение надежности в работе. Для захвата детали 8 упругие стержни 8 заводятся в отверстие детали 8. Диск 2, на котором жестко закреплены упругие стержни 5, поворачивается и обеспечивает закрутку упругих стержней 5 относительно своей оси в заделке диска 2. Благодаря упругим свойствам они разворачиваются в отверстиях 6 диска 7 корпуса 1 и захватывают деталь. 6 ил. i (Л (N9 а СХ) 4 о tc 1 г.2
,
и
,
Y
Фиг.1
Фиг.З
8
Фиг.
Фиг. 5
| Захват | 1980 |
|
SU933453A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
