(54) ЗАХВАТНАЯ ГОЛОВКА МАНИПУЛЯТОРА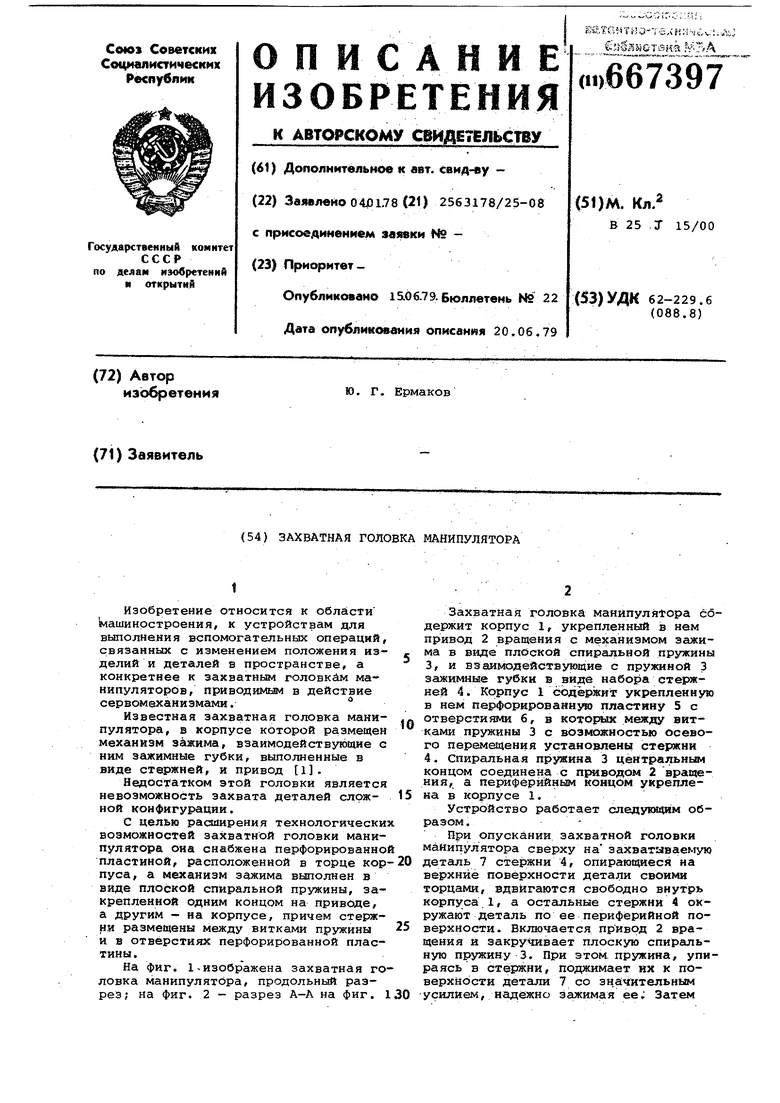
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1982 |
|
SU1013264A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Манипулятор для герметизированного пространства | 1988 |
|
SU1618651A1 |
| Захватное устройство | 1983 |
|
SU1220788A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Схват | 1987 |
|
SU1511114A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Захватное устройство | 1984 |
|
SU1217657A1 |
| Захватное устройство | 1985 |
|
SU1283097A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
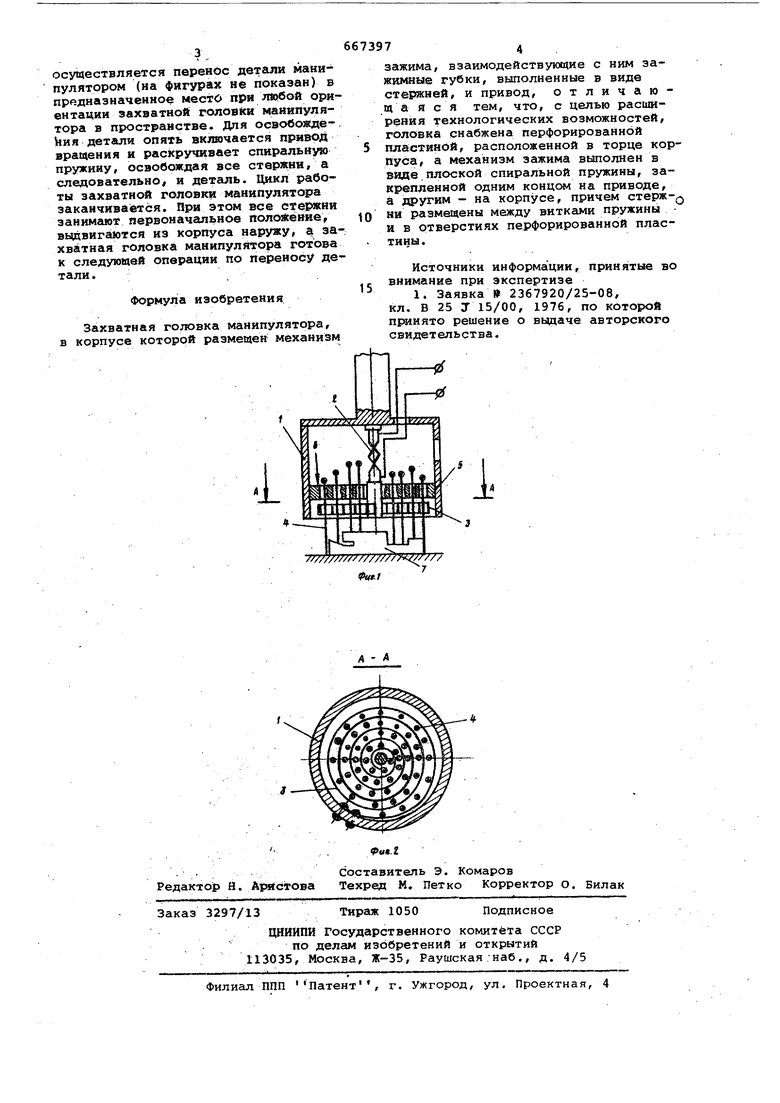
Изобретение относится к области (ашиностроения, к устройствам для выполнения вспомогательных операций, связанных с изменением положения изделий и деталей в пространстве, а конкретнее к захватным головкйм манипуляторов, приводимым в действие сервомеханизмами. Известная захватная головка манипулятора, в корпусе которой размещен механизм зажима, взаимодействующие с ним зажимные губки, выполненные в виде стержней, и привод tl. Недостатком этой головки является невозможность захвата деталей сложной конфигурации. С целью раоиирения технологически воаможностей захватной головки манипулятора она снабжена перфорированно пластиной, расположенной в торце кор пуса, а механизм зажима выполнен в виде плоской спиральной пружины, закрепленной одним концом на приводе, а другим - на корпусе, причем стержни размещены между витками пружины и в отверстиях перфорированной пластины. На фиг. 1-изображена захватная го ловка манипулятора, продольный разрез; на фиг. 2 - разрез А-А на фиг. Захватная головка манипулятора содержит корпус 1, укрепленный в нем привод 2 вращения с механизмом зажима в виде плоской спиральной пружины 3,и взаимодействующие с пружиной 3 з 1жимные губки в виде набора стержней 4. Корпус 1 содержит укрепленную в нем парФорироваин ж) пластину 5 с отверстиями 6, в которых между витками пружины 3 с возможностью осевого перемещений установлены стержни 4.спиральная пружина 3 центральным концом соединена с приводом 2 врагдаиия, а периферийным концом укреплена в корпусе 1. Устройство работает следукяцим образом. При опускании захватной головки манипулятора сверху на захватываемую деталь 7 стержни 4, опирающиеся на верхние поверхности детали своими торцами, вдвигаются свободно внутрь корпуса 1, а остальные стержни 4 окружают деталь по ее периферийной поверхности. Включается привод 2 вращения я закручивает плоскую спиральную пружину 3. При этом пружина, упираясь в стержни, поджимает их к поверхности детали 7 со значительным усилием, надежно зажимая ее; Затем
осуществляется перенос детали манипулятором (на фигурах не показан) в предназначенное местО при ориентации захватной головки манипулятора в пространстве. Для освобожде-. Ьия детали опять включается привод вращения и раскручивает спиральную пружину, освобождая все стержни, а следовательно, и деталь. Цикл раОоты захватной головки манипулятора заканчивается. При этом все стержни занимгиот первоначальное ПолоДёнивг ввдвигаются из корпуса наружу, а захватная головка манипулятора готова к следующей операции по переносу детали.
Формула изобретения
Захватная головка манипулятора, в корпусе которой размещен механизм
/f/////f/f /////ilrKf7//f/
зажима, взаимодействующие с ним зажимные губки, выполненные в виде стерякней, и привод, отличающая с я тем, что, с целью расширения технологических возможностей, головка снабжена перфорированной пластиной, расположенной в торце корпуса, а механизм зажима выполнен в виде.плоской спиральной пружины, закрепленной одним концсял на приводе, а другим - на корпусе, причем стержни размещены между витками пружины и в отверстиях перфорированной пластины.
Источники информации, принятые во внимание при экспертизе
7
