Изобретение откосится к машиностроению, а именно к манипуляторам, применяемым в различных производственных процессах.
Целью изобретения является повышение надежности за счет исключения возможности защемления гибких тяг при изгибе исполнительного органа манипулятора.
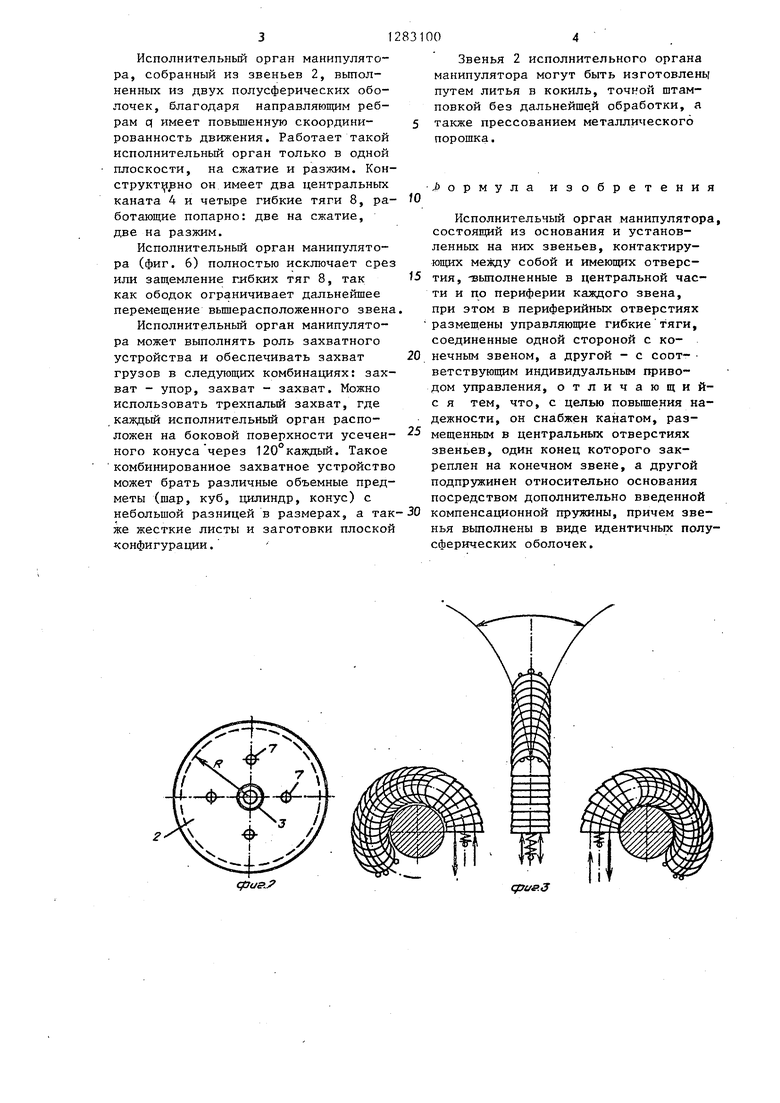
На фиг. 1 изображен исполнительный орган манипулятора, общий ви,п;; на фиг. 2 - то же, вид сверху; на фиг. 3 - возможные положения исполнительного органа манипулятора в работе; на фиг. 4 - вариант выполнения звеньев исполнительного органа манипулятора; на фиг. 5 - то же, вид сверху; на фиг. б - вариант выполнения; на фиг. 7 - сечение А-А на фиг фиг. б| на фиг. 8 - возможное выполнение захватного устройства из ис- ттрлнительных органов.
Исполннтельный орган манипулято- ра состоит из основания 1 и установленных на нем звеньев 2, каждое из которых выполнено в виде идентичных полусферических оболочек наружного радиуса R и внутреннего радиуса г. Звенья 2 исполнительного органа манипулятора установлены друг относительно друга так, что каждое последующее звено контактирует внутренним ободом полусферической оболочки радиуса г с поверхностью низшего звена радиуса R.Bo всех звеньях 2 имеются центральные отверстия 3 одинакового диаметра, в которых свободно размещен канат 4. Канат 4 закреплен на конечном звене 5, а другой его конец подпружинен относительно основания 1 посредством натяжного устройства, например компенсационной пружины 6.
Центрирование звеньев каната 4 не осуп1,ествляется, поэтому отверстия 3 могут быть значительно больше диаметра самого каната. Для управления механизмами во всех звеньях 1 пс периферии имеются четыре диаметрально расположенные отверстия 7,через которые беспрепятственно проходят одинаковые прочные гибкие тяги 8. Каждая тяга надежно закреплена на конечном звене 5 и выводится за пределы механизма на соответствующий индивидуальный привод управления, например, на управляющие катупжи, которые име2831002
ют дифференцированную связь. Так, при укорочении (натяжении ) одной гибкой тяги 8 остальные удлин яются без ослабления на необходимую длину,
с Управление может также осур;ествлять- ся серводвигателями.
Звено 2 (фиг. 4) исполнительного органа манипулятора состоит из двух полусферических оболочек.
10 Исполнительный орган манипулятора (фиг. 6) может быть заключен в эластичную герметично закрепленную на основании оболочку 9, а внутренняя полость между звеньями 2 и стенкой зласiS эластичной оболочки заполнена антифрикционным материалом 10, например, графитным порошком, древесной мукой, вязкой жидкостью и т.д. Звенья 2 выполнены усеченными, при вершине по
20 кругу, образованному от сечения зве
5
0
на, имеется кольцевой ободок 11, за ним располагаются гибкие тяги 8.
Исполнительный орган манипулятора работает следуюпщм образом.
При натяжении одной гибкой тяги 8 либо. цвуу рядом расположенных и соответственном ослаблении остальных гибких тяг 8 исполнительный орган получает кривизну изгиба тем большую, чем больше натяжение гибких тяг, ра- ботаюищх на сжатие. Изгиб происходит потому, что звенья 2 сдвигаются относительно друг .друга в сторону наибольшего натяжения (фиг„ 3). Для безотказной работы исполнительного органа манипулятора необходимы сле- дуюрще условия: точная геометрия- звеньев, достаточная чистота обработ-- ки контактирующих поверхностей, подбор прочньтх материалов с малым коэффициентом трения.
При изгибе механизма изгибается и центральный канат 4, удлиняясь за счет компенсационной пpyжIiны б.
5
Исполнительный орган манипулятора может выполнять роль захватного устройства и стремится обогнуть (обвить) захватываемьш предмет, удерживая его
;0 внешними боковыми поверхностями. При ослаблении усилия на гибкую тягу и соответственно натяжении противоле- .жащей гибкой тяги 8 до нормального состояния звенья 2 возвращаются в
5 исходное положение, компенсационная пружина б, разжимаясь, увлекает центральный канат 4, тем самым облегчая и возврат всего исполнительного органа в целом.
5
0
fO
31283100
Исполнительный орган манипулятора, собранный из звеньев 2, вьтол- ненных из двух полусферических оболочек, благодаря направляющим ребрам q имеет повышенную скоордини- рованность движения. Работает такой исполнительный орган только в одной плоскости, на сжатие и разжим. Кон- структ вно он имеет два центральных каната 4 и четыре гибкие тяги 8, работающие попарно: две на сжатие, две на разжим.
Исполнительный орган манипулятора (фиг. 6) полностью исключает срез или защемление глбких тяг 8, так как ободок ограничивает дальнейшее перемещение вышерасположенного звена.
Исполнительный орган манипулятора может выполнять роль захватного устройства и обеспечивать захват грузов в следующих комбинациях: захват - упор, захват - захват. Можно использовать трехпалый захват, где каждый исполнительный орган расположен на боковой поверхности усеченного конуса через 120°каждый. Такое комбинированное захватное устройство может брать различные объемные предметы (шар, куб, цилиндр, конус) с
15
20
25
Звенья 2 исполнительного органа манипулятора могут быть изготовлень путем литья в кокиль, точной штамповкой без дальнейше.й обработки, а также прессованием металлического порошка.
ормула изобретения
Исполнительный орган манипулятора, состоящий из основания и установленных на них звеньев, контактирующих между собой и имеющих отверстия, твыполненные в центральной части и по периферии каждого звена, при этом в периферийных отверстиях размещены управляющие гибкие тяги, соединенные одной стороной с конечным звеном, а другой - с соот- ветствующим индивидуальным приводом управления, отличающий- с я тем, что, с целью повьшения надежности, он снабжен канатом, размещенным в центральных отверстиях звеньев, один конец которого закреплен на конечном звене, а другой подпружинен относительно основания посредством дополнительно введенной
небольшой разницей в размерах, а так-30 компенсационной пружины, причем зве- же жесткие листы и заготовки плоской нья вьшолнены в виде идентичных полуконфигурации . сферических оболочек.
Звенья 2 исполнительного органа манипулятора могут быть изготовлень путем литья в кокиль, точной штамповкой без дальнейше.й обработки, а также прессованием металлического порошка.
ормула изобретения
Исполнительный орган манипулятора, состоящий из основания и установленных на них звеньев, контактирующих между собой и имеющих отверстия, твыполненные в центральной части и по периферии каждого звена, при этом в периферийных отверстиях размещены управляющие гибкие тяги, соединенные одной стороной с конечным звеном, а другой - с соот- ветствующим индивидуальным приводом управления, отличающий- с я тем, что, с целью повьшения надежности, он снабжен канатом, размещенным в центральных отверстиях звеньев, один конец которого закреплен на конечном звене, а другой подпружинен относительно основания посредством дополнительно введенной
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1987 |
|
SU1511121A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1139621A1 |
| Исполнительный орган манипулятора | 1978 |
|
SU770789A2 |
| Рука манипулятора | 1987 |
|
SU1450995A1 |
| Манипулятор | 1974 |
|
SU503710A1 |
| Исполнительный орган манипулятора | 1990 |
|
SU1771954A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И ОГРАНИЧЕНИЯ ГРУЗОПОДЪЕМНОСТИ ЛЕБЕДКИ | 1998 |
|
RU2144901C1 |
| ГИБКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 2019 |
|
RU2716293C1 |
| Гибкий исполнительный орган манипулятора | 2018 |
|
RU2691807C1 |
| Задающее устройство копирующего манипулятора | 1986 |
|
SU1333566A1 |

Исполнительный орган манипулятора относится к машиностроению, а именно к манипуляторам, применяемым 5в различных производственных процессах. Целью изобретения является по- вьшение. надежности. Исполнительный орган манипулятора имеет основание 1 и установленные на нем звенья, каждое из которых вьтолнено в виде идентичных полусферических оболочек. наружнего радиуса R и внутреннего радиуса г, звенья контактируют внутренним ободом полусферической оболочки радиуса г со сферической поверхностью нижнего звена радиуса R. Все звенья имеют центральные отверстия 3, в которых установлен канат 4, один конец которого закреплен на конечном звене 5, а другой подпружинен относительно основания натяжным устройством 6. В звеньях вьтолнены отверстия по периферии, через которые проходят гибкие тяги 8, связанные с одной стороны с конечным звеном 5, а с другой - с соответствующим индивидуальным приводом управления. При натяжении одной из гибких тяг 8 либо двух рядом расположенных исполнительный орган манипуляторов получает необходимую кривизну. 8 ил. а с CpufI в efifff.e
CflUS J
дуие.З
Cjf7t/ff.
.5
cpas. 7
фиг. 8
боставитель И. Бакулина Редактор К. Волощук Техред Л.Сердюкова Корректор М. Максимишинец
Заказ 7344/14 Тираж 949Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, К-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
| Исполнительный орган манипулятора | 1983 |
|
SU1139621A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
