Изобретение относится к атомной энергетике и может быть использовано в дистанционных системах управления копирующих манипуляторов.
Целью изобретения является повышение надежности работы и увеличение зоны обслуживания манипуляторов за счет обеспечения регулировок положений датчиков.
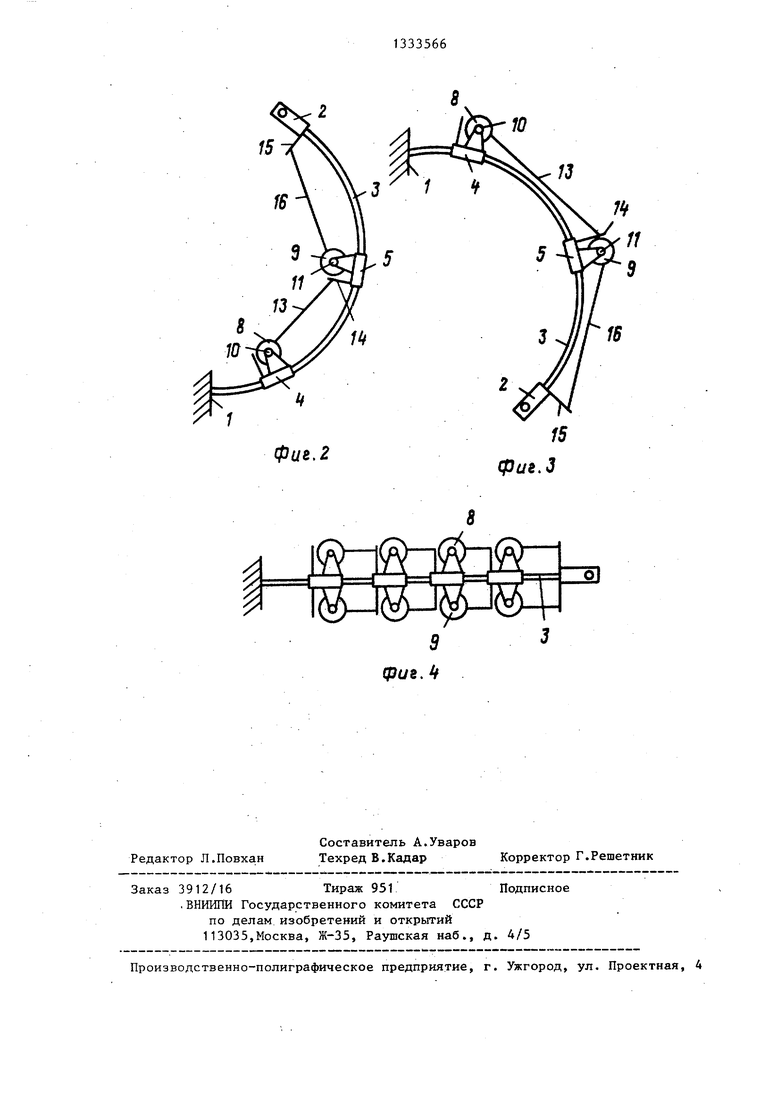
.На фиг, 1 показано задающее устройство; на фиг. 2 и 3 - кинематические схемы устройства в работе; на фиг, 4 - задающее устройство с датчиками по обе стороны плоской пружины, вариант.
Задающее устройство состоит из основания 1, рукоятки 2 управления, и упругого элемента 3, выполненного в виде плоской пружины. На упругом элё менте 3 размещены стойки 4 и 5,которые выполнены с возможностью перемещения по длине упругого элемента 3 фиксации на нем, а также снятия с него,На -перпендикулярных к поверхности упругого э.пемента частях 6 и стоек 4 и 5 установлены потенциомет- рические датчики 8 и 9 угловых перемещений, оси 10 И 11 которых подпружинены спиральными пружинами 12. Один конец гибкой тяги 13 намотан на. ось 10 датчика 8, а другой связа с перпендикулярной поверхности упругого элемента стойкой 14 стойки 5. Аналогично ось 11 датчика 9 связана со стойкой 15эразмещенной в данном случае на рукоятке 2 управления поредством гибкой тяги 16, На упругом элементе может быть установлено дополнительное количество стоек с потенциометрическими. датчиками. В этом случае ось 11 датчика 9 связана со стойкой последующего датчика. Для достижения более высокой точности управления платформы потенциомет рические датчики могут быть установлены симметрично по обе стороны упругого элемента (фиг, 4).Кроме того на рукоятке 2 управления установлен датчик 17 сжатия - разжатия схвата исполнительной рукоятки манипулятора (не показан),
Задающее устройство работает следующим образом.
При силовом воздействии на рукоятку 2 управления упругий элемент 3 изгибается пропорционально величинам нагрузок,приложенным к рукоятке 2 управления, и принимает определен
5
0
5
0
ную форму. Если радиус кривизны упругого элемента 3 направлен в сторону расположения датчиков 8 и 9,то расстояния между осями 10 и 11 датчиков 8 и 9 и стойками 14 и 15 сокращаются (фиг, 2)„При этом натяжение гибких тяг 13 и 16 уменьшается, и пружины 12 (на фиг. 2 не показаны) раскручиваются, вращая оси 10 и 11 датчиков 8 и 9,с которых снимаются сигналы, сс/ответствующие данному положению упругого элемента. Ес.пи же радиус кривизны упругого элемента направлен в другую сторону,то расстояние между осями 10 и 11 датчиков 8 и 9 и стойками 14 и 15 увеличивается (фиг, 3), При этом ,гибкие тяги 13 и 16 вращают оси 10 и 11 датчиков 8 и 9, с которых снимаются . сигналы о положении упругого элемента 3, Эти сигналы после необходимого усиления и преобразования подаются на соответствующие -следящие приводы звеньев исполнительного органа манипулятора. Разжатие или сжатие захватного устройства осуществляется с помощью сигналов., снимаемых с датчика 17,
I
Формула изобретения.
1. Задающее устройство копирующего .манипулятора содержащее основание и рукоятку управления, связанные меж- ду.собой упругим элементом,выполненным в виде плоской пружины, и датчики положения, отличающее- с я тем,, с целью повьшения надежности работы и увеличения зоны обслуживания манипулятором за счет обеспечения регулировок положений датчиков, оно снабжено стойками,установленными на упругом элементе с возможностью перемещения и фиксации, а датчики расположены на стойках и выполнены в виде потенциометров, причем ось каждого потенциометра подпр5.-жинена и связана дополнительно введенной гибкой тягой с соседней
стойкой.
2,Устройство по п. 1, отличающееся тем,что стойки вы- гЕолнены съемными.
3,Устройство по пп, 1 и 2, о т- ji и ч а ю щ е е с я тем,что стойки с расположенными на них датчиками положения размещены симметрично по обе стороны упругого элемента.
Ю
16
Фие.2
фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающее устройство копирующего манипулятора | 1987 |
|
SU1437209A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Копирующий манипулятор | 1980 |
|
SU1024265A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| КЛИПСАТОР | 2000 |
|
RU2162638C1 |
| Задающее устройство для исполнительного органа манипулятора | 1986 |
|
SU1335443A2 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| Задающее устройство манипулятора | 1985 |
|
SU1757874A1 |
| КУЛЬТИВАТОР | 1995 |
|
RU2090025C1 |
Изобретение относится к атомной энергетике и может быть использовано в дистанционных системах управления копирующих манипуляторов. -Целью изобретения является повышение надежности работы и увеличение зоны обслуживания манипулятором за счет обеспечения регулировок положений датчиков. -При приложении усилия к рукоятке 2 управления упругий элемент 3 изгибается. Гибкие тяги 16 закручивают оси 10 и 11 потендиометрических датчиков 8 и 9, с которых снимаются сигналы, соответствующие данному положению упругого элемента 3. Изменение направления нагрузки на рукоятку 2 управления сопровождается раскручиванием осей 10 и 11 под действием спиральных пружин 12. Перемещая стойки 4 и 5 вдоль упруг ого элемента 3, а также увеличивая их количество, повышают надежность управления манипулятором и зону его обслуживания. 2 3.п. ф-лы, 4 ил. (Л Ю 8 со со СлЭ О 05
Редактор Л.Повхан
Составитель А.Уваров Техред В.Кадар
Заказ 3912/16Тираж 951Подписное
.ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035,Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Г.Решетник
| Задающее устройство для исполнительного органа манипулятора | 1982 |
|
SU1229028A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
