(Л
Изобретение относится к машиностроению, а именно к манипуляторам, применяемым в различных производственных процессах.
Целью изобретения является расширение зоны обслуживания за счет увеличения угла относительного поворота звеньев.
На чертеже изображен исполнитель- ный орган манипулятора, сечение в плоскости изгиба (тонкими линиями изображено одно из его рабочих положений) ,
Исполнительный орган манипулятора содержит корпус 1, на котором последовательно установлены звенья 2 и конечное звено 3, контактирующие меунцу собой и с корпусом по охватываемым и охватывающим поверхностям, выполненным на последних,
В звеньях 2 имеются отверстия, в которых проходят гибкие тяги 4, соединенные одним концом с конечным звеном 3, а другим концом - с инди- видуальным приводом 5 управления. Эти отверстия в звеньях вьшолнены под углом к оси исполнительного органа в плоскости изгиба от периферии охватьшаемой поверхности к цент- ру охватывающей поверхности, А на охватываемой поверхности каждого из звеньев 2 и 3 выполнен паз 6, профил которого эквидистантен охватываемой поверхности, в котором размещена со- ответствующая гибкая тяга 4, Все звенья 2 и- конечное звено 3 охватываются эластичной упругой оболочкой 7, прикрепленной к корпусу 1,
При увеличении габаритов исполни- тельного органа манипулятора с целью уменьщения трения скольжения в паре охватывающей и охватываемой поверхностей звеньев возможна конструктивно обоснованная замена сопряжения звеньев по охватывающим и охватывае- мьм поверхностям на щарнирное их соединение по осям, проходящим через центры вращения звеньев,
А с целью уменьшения износа отверстия и паза звена и поверхности гибкой тяги, а также уменьшения силы трения между поверхностью звена и поверхностью гибкой тяги во можна установка блока на входе и блока на
выходе гибкой тяги из тела звена, которые огибает гибкая тяга.
Исполнительный орган манипулятора работает следующим образом.
При подаче усилия через индивидуальный привод 5 управления на соответствующую гибкую тягу 4 происходит последовательный поворот периферийно части охватываемой поверхности каждого звена 2 и затем конечного звена 3 к центру охватывающей поверхности предыдущего звена. Между звеньями 2 и конечным звеном 3 гибкая тяга 4 скользит по поверхности паза в охватываемой поверхности каждого звена При этом исполнительный орган манипулятора осуществляет переноС -.за- хватного устройства в необходимое положение или может сам вьтолнять роль схвата и осуществлять требуемый зажим детали. Эластичная упругая оболочка 7 обеспечивает постоянный контакт охватываемых и охватывающих поверхностей звеньев 2 и конечного звена 3 и возврат этих звеньев в исходное положение,
Формула изобретения
Исполнительный орган манипулятора, содержащий корпус, звенья, последовательно установленные на корпусе и контактирующие между собой и с корпусом по охватывающим и охватываемым поверхностям, выполненным на последних, а в звеньях имеются отверстия, в которых размещены гибкие тяги, соединенные с одной стороны с конечным звеном, с другой стороны - с индивидуальным приводом управления, а также эластичнзта упругую оболочку, охватывающую звенья и прикрепленную к корпусу, отличающийся тем, что, с целью расширения зоны обслуживания за счет увеличения угла относительного поворота звеньев, отверстия в звеньях выполнены под углом к оси исполнителного органа в плоскости изгиба от периферии охватываемой поверхности к центру охватывающей поверхности, при этом на охватываемой поверхности каждого звена выполнен паз, профиль которого эквидистантен охватываемой поверхности, в котором размещена со - ответствующая гибкая тяга.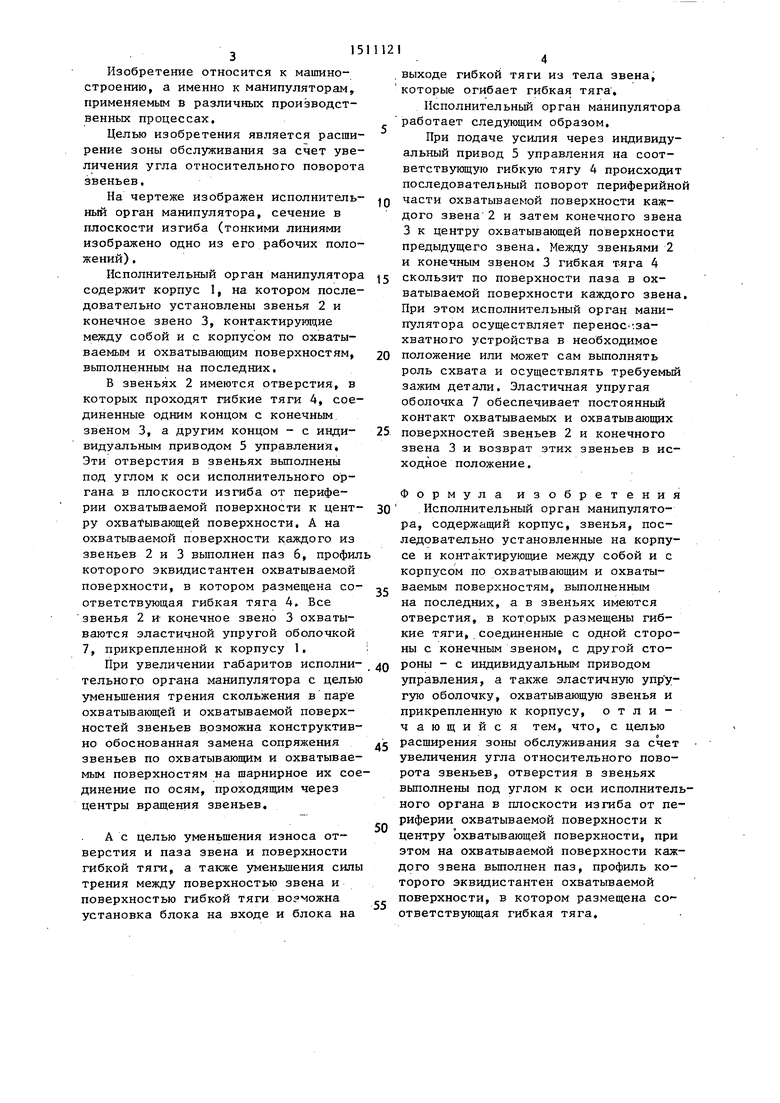
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1984 |
|
SU1283100A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1139621A1 |
| Манипулятор | 1991 |
|
SU1757876A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Манипулятор | 1984 |
|
SU1229027A1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 1989 |
|
SU1832619A1 |
| ГИБКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 2019 |
|
RU2716293C1 |
| Исполнительный орган манипулятора | 1985 |
|
SU1263519A1 |
| Хобот манипулятора | 1983 |
|
SU1114546A1 |
| Гибкий исполнительный орган манипулятора | 2018 |
|
RU2691807C1 |
Изобретение относится к машиностроению, а именно к манипуляторам, применяемым в различных производственных процессах. Цель изобретения - расширение зоны обслуживания за счет увеличения угла относительного поворота звеньев. Для этого в звеньях 2 отверстия выполнены под углом к оси исполнительного органа в плоскости изгиба от периферии охватываемой поверхности к центру охватывающей поверхности. На охватываемой поверхности каждого звена 2 и конечного звена 3 выполнен паз 6, профиль которого эквидистантен охватываемой поверхности. В этом пазу 6 каждого звена размещена соответствующая гибкая тяга 4. 1 ил.
| Исполнительный орган манипулятора | 1983 |
|
SU1139621A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
