(54) ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1979 |
|
SU854709A2 |
| Исполнительный орган манипулятора | 1979 |
|
SU831611A2 |
| Исполнительный орган манипулятора | 1975 |
|
SU510364A2 |
| Исполнительный орган манипулятора | 1974 |
|
SU498156A1 |
| Захват манипулятора | 1978 |
|
SU935263A2 |
| Схват | 1987 |
|
SU1407796A1 |
| Схват манипулятора | 1984 |
|
SU1271743A2 |
| Пневматический захват | 1979 |
|
SU795941A1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1134362A1 |
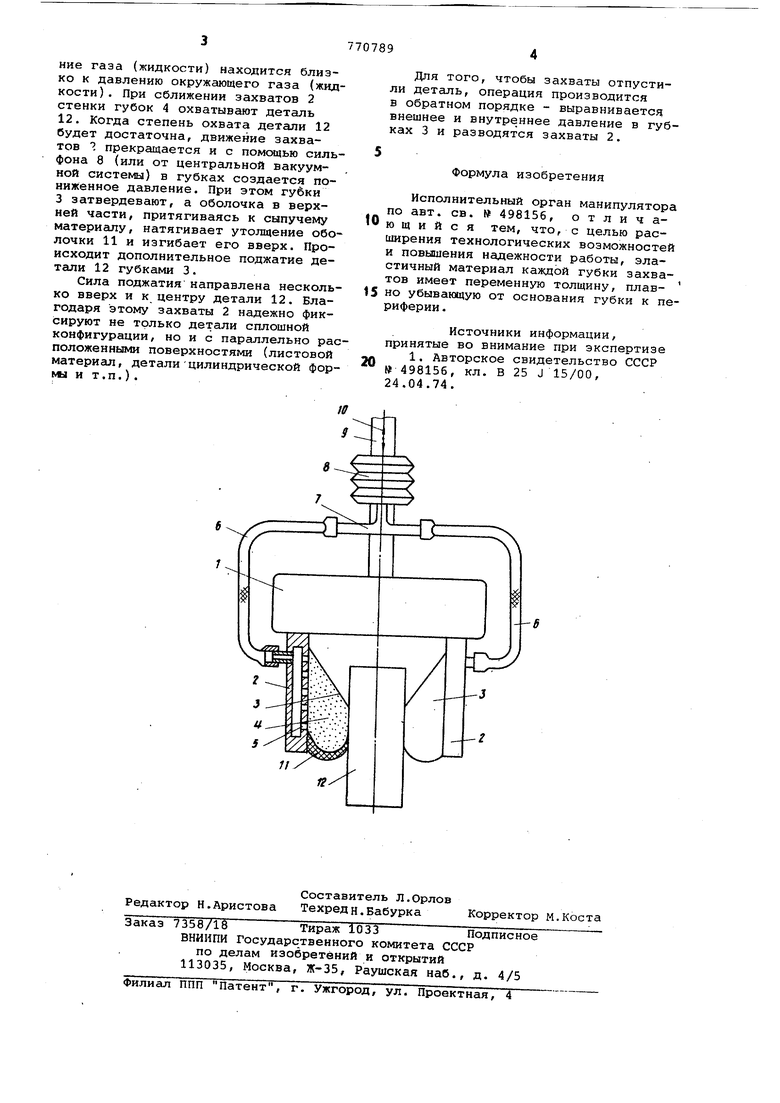
Изобретение относится к манипуляторостроению и может быть исполь зовано при создании различных мани пуляторов и приспособлений для вре менного закрепления предметов при их обработке и транспортировке. По основному авт. св. № 498156 известен исполнительный орган мани пулятора, содержащий захватные рычаги с приводным механизмом и герметичные тонкостенные губки из эла тичного тонкостенного материала, заполненные сыпучим гранулированным веществом и снабженный устройством, герметично связанным с губк ми для создания в них пониженного давления на время закрепления детали, причём устройство для создания пониженного давления выполнено в виде сильфона ij . Недостаточная нгщежность работы известного исполнительного органа манипулятора при захвате деталейлистовой и цилиндрической форим сужает его технологические возможности. Целью изобретения является повы шение надежности работы и расширение технологических возможностей исполнительного органа манипулятора. Для этого эластичный материал каждой губки захвдтов имеет переменную толщину, плавно убывающую от основания губки к периферии. На чертеже изображен общий вид исполнительного органа манипулятора. На корпусе 1 закреплены подвижно захваты 2, несущие выполненные из эластичного материала губки 3, полости которых заполнены сыпучим материалом 4 и через перфорации 5 в захватах 2 и трубопроводы 6 и 7 сообщаются с сильфоном 8, установленным на держателе 9 корпуса 1 и со средством его привода 10. Материалы нижней части каждой губки 3 выполнены с утолщением 11, плавно убывающим от основания захвата 2 к центру губки 3, контактирующей с деталью 12. Работа исполнительного органа манипулятора заключается в следующем. В исходном -положении перед взятием детали 12 захваты 2 разведены, сильфон 8 находится в сжатом состоянии так, что в губках 3 давление газа (жидкости) находится близко к давлению окружающего газа (жидкости) . При сближении захватов 2 стенки губок 4 охватывают деталь 12. Когда степень охвата детали 12 будет достаточна, движение захватов прекращается и с помощью сильфона 8 (или от центральной вакуумной системы) в губках создается пониженное давление. При этом губки 3 затвердевают, а оболочка в верхней части, притягиваясь к сыпучему материсшу, натягивает утолщение оболочки 11 и изгибает его вверх. Происходит дополнительное поджатие детали 12 губками 3.
Сила поджатия направлена несколько вверх и к центру детали 12. Благодаря этому захваты 2 надежно фиксируют не только детали сплошной конфигурации/ но и с параллельно расположенными поверхностями (листовой материал, детали цилиндрической форNU и т.п.) .
Для того, чтобы захваты отпустили деталь, операция производится в обратном порядке - выравнивается внешнее и внутреннее давление в губках 3 и разводятся захваты 2.
Формула изобретения
Исполнительный орган манипулятора по авт. св. № 498156, о т л и ч а«0 ю щ и и с я тем, что, с целью расширения технологических возможностей и повышения надежности работы, эластичный материал каждой губки захватов имеет переменную толщину, плавно убывающую от основания губки к периферии .
Источники информации, принятые во внимание при экспертизе
