Изобретение относится к электротехнике и может быть использовано в регулируемом асинхронном электроприводе для определения координат асинхронного двигателя: скорости враще- ния и составляющих потокосцепления.
Целью изобретения является упрощение конструкции и повышение точности определения координат асинхронного двигателя.
На чертеже представлена функциональная схема устройства для определения координат асинхронного двигателя,
Устройотво для определения коорди- нат асинхронного двигателя содержит датчик 1 фазных токор статора, подключенный выходом к входу блока 2 преобразования фаз токов, датчик 3 фазных напряжений статора, подклю- ченный выходом к входу блока 4 преобразования фаз напряжений, сумматоры 5-12, блок 13 деления, интеграторы 14 и 15.
В устройство для определения координат асинхронного двигателя введен блок 16 дифференцирования. При этом первьй выход блока 2 преобразования фаз токов подключен к первым входам сумматоров 5,8,9 и 12. Второй пыхрд блока 2 преобразования фаз токов подключен к первым входам сумматоров 6, 7 и 11. Первый и второй выходы блока 4 преобразования фаз напряжений под- клЛены соответственно к вторым вхо- дам сумматоров 5 и 6, выходы которых соединены соответственно с входами интеграторов 14 и 15. Выход интегратора 14 подключен к вторым входам сумматоров 8,9 и 12, а выход интегратора 15 подключен к вторым входам сумматоров 7 и 11.
Выход сумматора 8 подключен к входу блока 16 дифференцирования, соединенного выходом с первым входом сумматора 10, второй вход которого подключен к выходу сумматора 9.
Выходы сумматоров 10 и 7 подключены соответственно к входам делимого и делителя блока 13 деления, выход которого и выходы сумматоров 11 и 12 образуют выходы устройства для определения координат асинхронного двигателя.
Устройство для определения координат асинхронного двигателя работает следующим образом.
С помощью блока 2 преобразования фаз токов формируются сигналы 1- и Igp, из выходных трехфазных сигналов датчика 1 фазных токов статора, а с помощью блока 4 преобразования фаз Напряжений формируются сигналы Ug и Ugn из выходных трехфазных сигналов датчика 3 фазных напряжений статора.
Коэффициенты преобразований сумматоров 5-12, указанные на чертеже, определяются параметрами асинхронного двигателя по выражениям: К RS К., -Lg, К, -1, К4 L;. К, -1/Т,, Кб Lg/T, К 1/К
-Lg/K.
На выходе сумматоров 5 и 6 подучают соответственно I
8
Sci
I Rt
5о(, 5
.
dt
(1)
и I R
sf dt
где (f VgA составляющие вектора
rs
потокосцепления статора. В интеграторах 14,15, выполненньтх по схемам со стабильным нулем, В1э1чис- ляют составляющие ((Jg ,CjJga :
f d(ssi ,.. .
(2)
.
P J dt .
Используя уравнение равновесия ЭДС для роторной цепи в неподвижной системе координат и уравнение связи цепей статора и ротора, получают выражение для определения частоты вращения ротора о).
гт т -/., -.-L5 - 1 dt
И
(Ч15ос- 5 -(: ,
(;.
.(3)
Реализация (3) осуществляется с помощью сумматоров 7-10, блока 16 дифференцирования и блока 13 деления.
На выходах сумматоров 11 и 12 формируются соответственно
п -1 пLS
Vrp -Fp sp-к;
u l;s
. socк.
Isp,
5Л
где (j , , (|J - составляющие вектора
потокосцепления ротора В рассмотренном устройстве вычисление со ,) , производится с высокой точностью за счет уменьшения количества вычислений и за счет .использования непосредственно измеряемых фазных токов и напряжений статора.
Таким образом, введение в устройство блока дифференцирования и орга- низация новых связей между элементами обеспечивает определения координат асинхронного двигателя, а именно скорости вращения ротора и составляющих векторов потокосцеплений статора и ротора более простыми техническими средствами, за счет чего упрощается конструкция и повышается точность работы в сравнении с известным решением. .
Формула изобретения
Устройство для определения координат асинхронного двигателя, содер- жащее датчик фазных токов статора, подключенный выходом ко входу блока преобразоЬания фаз токов, датчик фазных напряжений статора, подключенный выходом к входу блока преобразования фаз напряжений, восемь сумматоров, блок деления, два интегратора, отличающееся тем, что, с целью упрощения и повьшения точности, введен блок дифференцирования, при
Редактор А.Долинич Заказ 7456/56
Составитель А.Жилин Техред В.Кадар
Корректор А.
Тираж 661Подписное
ВНИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4.
этом первый выход блока преобразования фаз токов подключен к первым вхо дам первого, четвертого, пятого и восьмого сумматоров, второй выход блока преобразования фаз токов подключен к первым входам второго, третьего и седьмого сумматоров, первый и второй выходы блока преобразования фаз напряжений подключены соответственно к вторым входам первого и второго сумматоров, выходы которых соединены соответственно с входами первого и второго интеграторов,.выход первого интегратора подключен к вторым входам четвертого, пятого и восьмого сумматоров, выход второго интегратора подключен к вторым входам третьего и седьмого сумматоров, выход четвертого сумматора подключен к входу блока дифференцирования, соединенного выходом с первым входом шестого сумматора, второй вход которого подключен к выходу пятого сумматора, выходы шестого и третьего сумматоров подключены соответственно к входам делимого и делителя блока деления,-выход которого и выходы седьмого и восьмого сумматоров обраг зуют выходы устройства для определения координат асинхронного двигателя.
Корректор А. Тяско
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2426219C1 |
| Электропривод | 1987 |
|
SU1515324A1 |
| Частотно-регулируемый асинхронный электропривод | 1983 |
|
SU1119155A1 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
Изобретение относится к электротехнике. Целью изобретения является упрощение и повышение точности определения координат асинхронного двигателя (АД). Устройство длА определения координат АД содержит датчик 1 тока и датчик 3 напряжения статора АД. Датчик 1 подключен к входу блока 2преобразования фаз токов, а датчик 3- к входу блока 4 преобразования фаз напряжений. Первый выход блока 2 связан с первыми входами сумматоров (с) 9,8j5,12. Второй выход блока 2 соединен с первыми входами С-7,6,П1. Выходы блока 4 подключены соответственно к вторым входам С 5,6, выходы которых связаны с входами интеграторов (и) 14,,15 соответственно. Выход И 14 подключен к второму входу С 8, выходом соединенного с входом блока 16 дифференцирования, и второму входу С 12. Выход И 15 соединен с вторым входом С 7, выходом подключенного к входу Делитель блока 13 деления, и вторым входом С 11.Вход Делимое блока 13 связан с выходом С 10, второй вход которого соединен с выходом блока 16.Вустройстве спомощью С 7-10 и блоков 16, 13 осуществляетсявьгчисле- ние частоты (.0 вращения АД,а с помощью С 11,12 - составляющих р, вектора потокосцепления ротора АД. 1 ил. 2W ро ю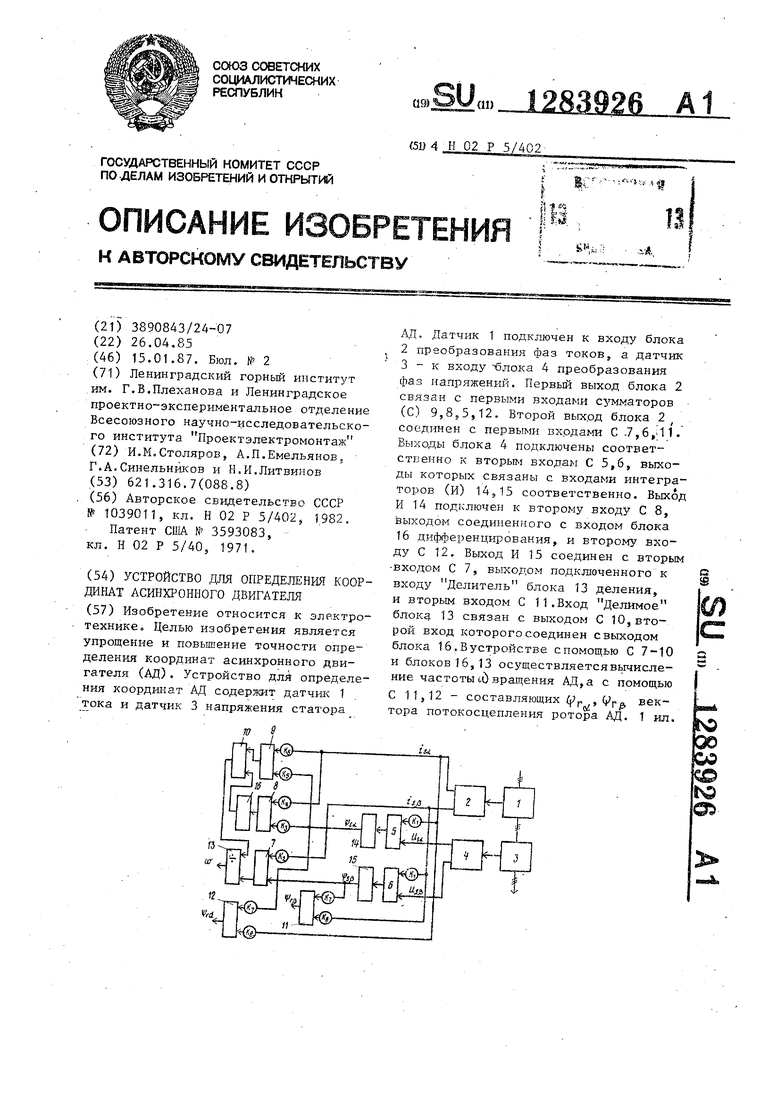
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
