Изобретение относится к гидроавтоматике и может быть использовано в гидросистемах станков, прессов и летательных аппаратов.
Целью изобретения является повышение точности и надежности.
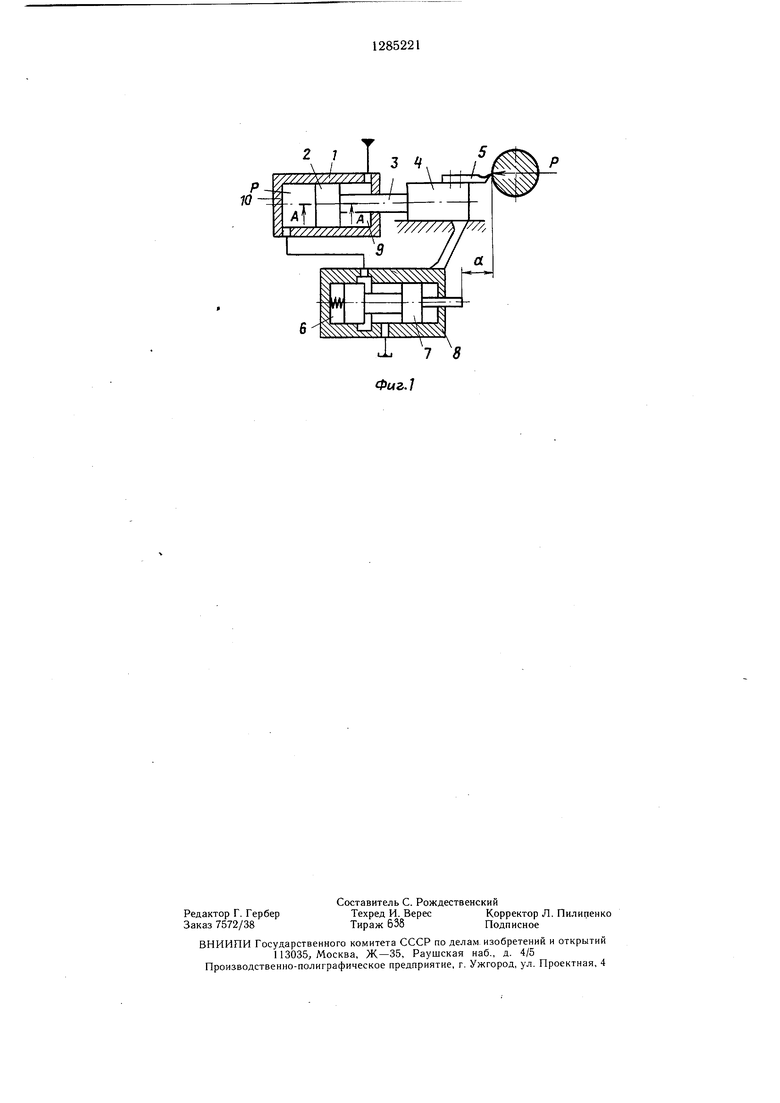
На фиг. 1 изображена схема гидравлического следящего привода; на фиг. 2 - разрез А-А на фиг. 1.
Гидравлический следящий привод содержит исполнительный гидроцилиндр 1 с порщ- нем 2 и односторонним щтоком 3, соединенным с рабочим органом 4, несущим режущий инструмент 5, и однощелевой следящий распределитель 6, золотник 7 которого связан с задатчиком (не изображен), а гильза 8 - со штоком 3, причем штоковая полость 9 гидроцилиндра 1 соединена с источником рабочей жидкости постоянного давления (не изображен) и через регулируемый дроссель - с порщневой полостью 10, которая соединена через распределитель 6 со сливом.
Регулируемый дроссель выполнен в виде сопла 11, закрепленного в расточке 12 порщ- пя 2, выполненный со стороны полости 10, и заслонки в виде мембраны 13, подпружиненной регулируемой пружиной 14 со стороны, противоположной выходу сопла 11, вход которого соединен со штоковой полостью 9. Жесткости мембраны 13 и пружины 14 выбираются таким образом, что в исходном положении (при отсутствии нагрузки) мембрана 13 имеет выпуклость вправо (по чертежу), а при максимальной нагрузке занимает нейтральное положение (становится плоской).
Гидравлический следящий привод работает следующим образом.
При перемещении золотника 7, например, вправо (по чертежу) увеличивается давление в полости 10 гидроцилиндра 1 и поршень 2 перемещается вправо, чем обеспечивается слежение рабочего органа 4 за положением золотника 7.
Точность слежения определяется постоянством расстояния а между точками золотника 7 и рабочего органа 4, соединенного со щтоком 3. Если расстояние а постоянно, то ощибка слежения равна нулю. Наличие нагрузки Р на рабочем органе 4 направлено на изменение расстояния а, так как она стремится сместить рабочий орган 4 и соединенную с ним гильзу 8 влево для увеличения давления.
Однако наличие нагрузки на рабочем органе 4 вызывает увеличение давления в полости 10 не путем смещения элементов распределителя 6, а за счет изменения сечения дросселя, образованного соплом 11 и мембраной 13. Так, при увеличении нагрузки Р возрастает давление :В полости 10 и в расточке 12, что приводит к деформации мембраны 13, т. е. к увеличению расстояния х между мембраной 13 и соплом 11 и увеличению расхода рабочей жидкости из полости 9 через сопло 11, несмотря на уменьщение перепада давления на нем. Поскольку в исходном положении мембрана 13 имеет выпуклость в сторону сопла 11, можно обеспечить с помощью регулируемой пружины 14 нелинейный закон изменения сечения регулируемого дросселя, при котором крутизна его характеристики увеличивается по мере увеличения нагрузки. В результате привод обладает высокой гидравлической жесткостью и элементы распределителя 6 не смещаются при изменении нагрузки на рабочем органе.
Использование предлагаемого изобретения в гидросистемах станков, прессов и летательных аппаратов позволяет повысить их точность и надежность и, тем самым, увеличить эффективность их использования.
25
45
30
35
40
Формула изобретения
Гидравлический следящий привод, содержащий исполнительный гидроцилиндр с порщнем и односторонним щтоком, соединенным с рабочим органом, задатчик и однощелевой следящий распределитель, золотник которого связан с задатчиком, а гильза - со щтоком гидроцилиндра, причем щтоковая полость последнего соединена с источником рабочей жидкости и через регулируемый дроссель - с порщцевой полостью, которая соединена уерез следящий распределитель со сливом, отличающийся тем, что, с целью повышения точности и надежности, регулируемый дроссель выполнен в виде сопла, закрепленного в расточке порщня, выполненной со стороны порщневой полости, и мембранной заслонки, подпружиненной со стороны, противоположной выходу сопла, вход которого соединен со щтоковой полостью гидроцилиндра, при этом пружина выполнена регулируемой.
77/,
у//////)П J/ а
Составитель С. Рождественский
Техред И. ВересКорректор Л. Пилипенко
Тираж 638Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
J
J7 7 8 Фиг.1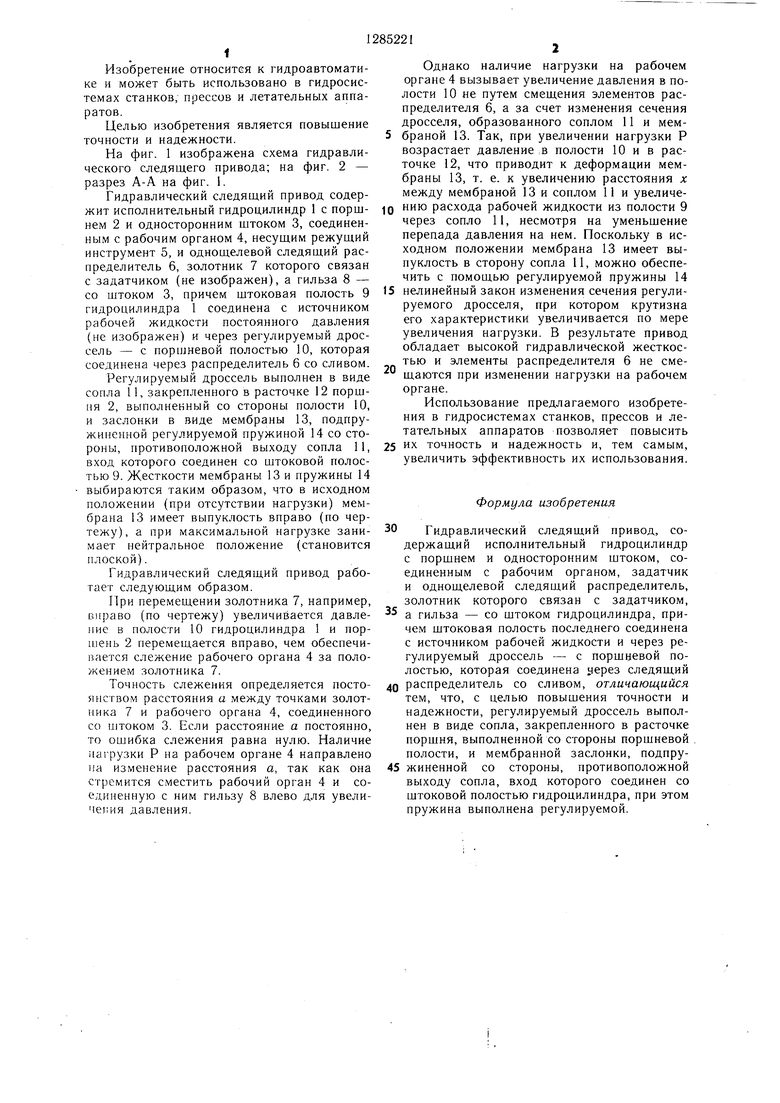
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод | 1989 |
|
SU1672010A1 |
| Гидравлическая следящая система | 1976 |
|
SU601470A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1997 |
|
RU2125667C1 |
| Вальцешлифовальный станок для обработки валков в собственных подшипниках | 1975 |
|
SU556029A1 |
| Гидравлический следящий привод | 1974 |
|
SU607061A1 |
| Пневмогидравлический следящий привод | 1987 |
|
SU1479713A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347949C1 |
| Гидравлический следящий привод | 1982 |
|
SU1023151A1 |
| Пневмогидравлический следящий привод | 1986 |
|
SU1325203A2 |
| Дросселирующий гидрораспределитель | 1988 |
|
SU1576742A1 |
Изобретение относится к гидроавтоматике и может быть использовано в станка.х, прессах и летательных аппаратах. Изобретение позволяет повысить точность и надежность привода путем увеличения его жесткости. Для этого дроссель, соединяющий полости 9 и 10 гидроцилиндра 1, выполнен в виде сопла 11 и подпружиненной мембранной заслонки 13, установленных в порщне 2. Вход сопла 11 сообщен со щтоковой полостью 9, а пружина 14 выполнена регулируемой и установлена со стороны заслонки 13, противоположной выходу сопла П. Поскольку в исходном положении заслонка 13 имеет выпуклость в сторону сопла 11, с помощью пружины 14 можно обеспечить нелинейный закон излленения сечения дросселя, при котором крутизна его х-ки увеличивается по .мере увеличения нагрузки. 2 ил. А-А S 1Л ISD 00 СП o кэ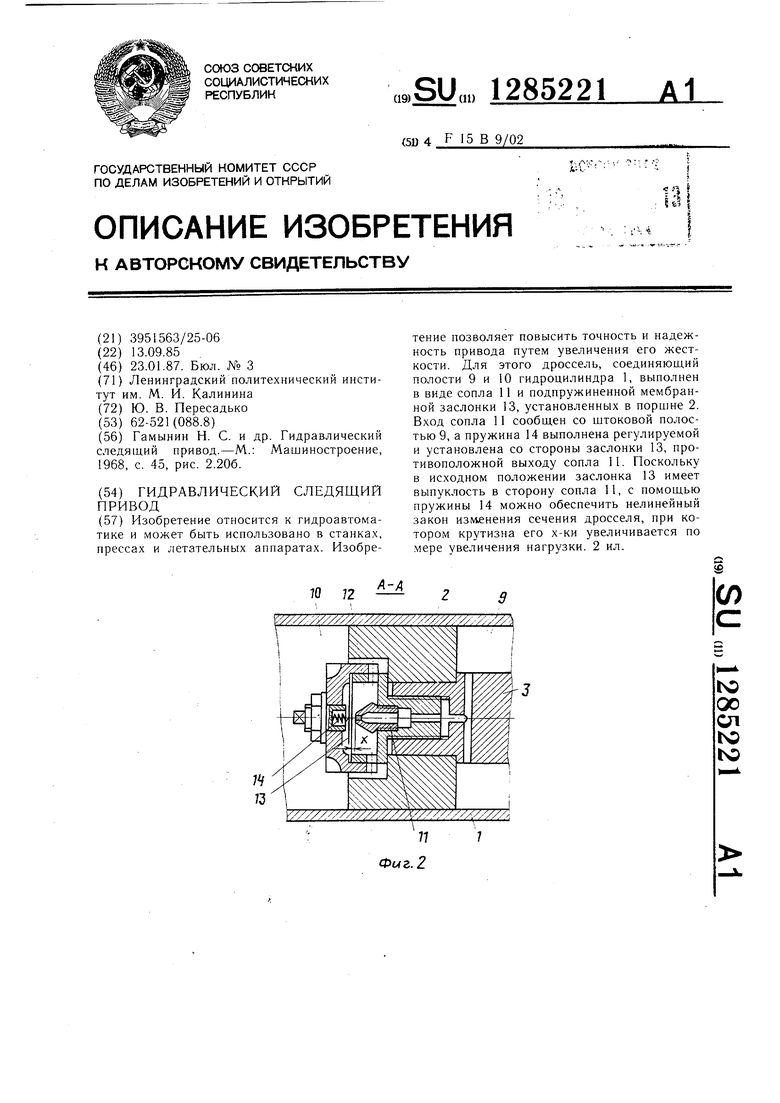
| Гамынин Н | |||
| С | |||
| и др | |||
| Гидравлический следящий привод.-М.: Машиностроение, 1968, с | |||
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
