112
Изобретение относится к энерге- тическому машиностроению, а именно к тормозам лебедок, и может быть использовано в ряде отраслей машиностроения для оснащения средств подъема и транспортирования различного рода грузов.
Целью изобретения является расширение функциональных возможностей путем обеспечения различных режимов спуска груза в случаях аварийного отключения питающей механизм электроэнергии.
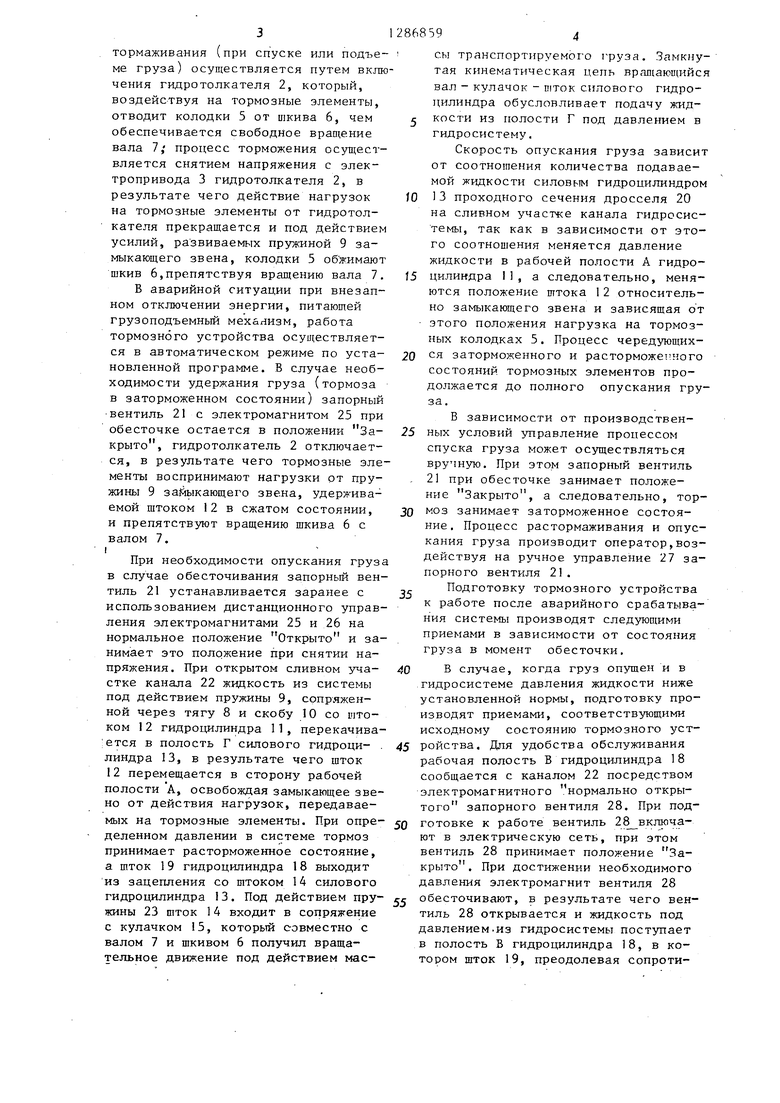
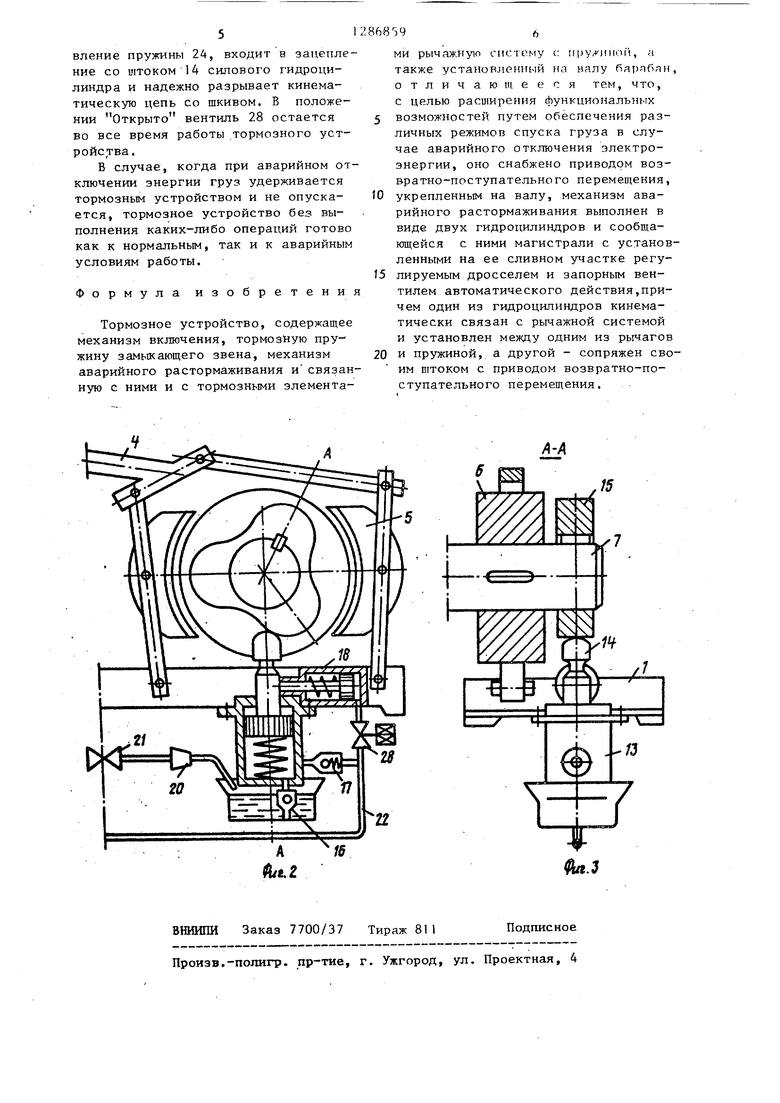
На фиг. 1 представлено тормозное устройство, общий вид; на фиг.2
то же, часть , на фиг. 3 - разрез А-А на фиг. 2.
Тормозное устройство состоит из жесткого основания 1 ,на котором шарнир- но закреплены силовой механизм включения типа гидротолкателя 2 с электроприводом 3,тормозные элементы - р ычаги 4 и колодки 5, сопрягаемые со шкивом (барабаном) 6, установленным на вращающемся валу 7, замыкающее звено, состоящее из тяги 8, пружины 9,скобы 10 и гидроцилиндра 11, корпус которого закреплен на жестком основании 1, а его шток 12 сопряжен со скобой 10 замыкающего звена. В механизм аварийного растормаживания входят силовой гидроцилиндр 13, корпус которого закреплен на основании 1 , што к 14, кинематически связанный с приводом шкива 6, например,посредством кулачка 15, закрепленного на вращающемся валу 7, всасывающий 16 и Нагнетательный 17 клапаны гидроцилиндра 13,3 гидроцилиндр 18, корпус которого закреплен на основании 1, а шток 19 сопряжен со штоком 14 силового гидроцилиндра 13,регулируемый дроссель 20 и запорный вентиль 21, установленные на канале 22, со
общающем рабочие полости А гидроцилиндра 11, Б силового гидроцилиндра 13 и В гидроцилиндра 18 между собой и со сливным участком, сообщенным со всасьшающей полостью Г силового гидроцилиндра 13.
Шток 14 подпружинен пружиной 23, а шток 1 9 - пружиной 24. Запорный вентиль 21 связан с электромагнитами 25 и 26. Электромагнит 26 имеет ручное управление 27. В канале 22 уста новлен запорный вентиль 28.
В тормозном устройстве на скобе 10 замыкающего звена предусмотрено отверстие 29, через которое скоба с
5
0
5
0
5
0
5
0
5
помощью штыря может быть шарнирно закреплена на основании 1. Этим приемом пользуются при проведении про- филактических ремонтов устройства, а также в тех случаях, когда в течение длительного времени не требуется в аварийной ситуации опускать груз.
Тормозное устройство работает следующим образом.
В исходном положении - при наличии питающей устройство электроэнергии и отсутствии давления жидкости в гидросистеме - включают электропривод 3 гидротолкателя 2 и привод лебедки (не показан), который вращает вал 7 и закрепленные на нем пгкив 6 и кулачок 15. При враш.ении кулачок 15, кинематически связанный с силовым гидроцилиндром 13, создает воз- Вратно-поступательное перемещение рабочего органа гидротолкателя - в нижнее: крайнее положение от воздействия вращающегося профиля кулачка 15 на торец штока 14 и в верхнее крайнее положение от действия пружины 23, в результате чего жидкость из полости Г поступает в рабочую полость Б гидроцилиндра 13 и затем по каналу 22 - в полости А гидроцилиндра 11 и В гидроцилиндра 18. Поступающая в канал жидкость при закрытом вентиле 21 на участке слива перемещает шток 12, который сжимает пружину 9 замыкающего звена, при этом гидротолкатель 2 удерживает тормозные элементы (рычаги 4 и колодки 5) в расторможенном состоянии, чем обеспечивается возможность вращения шкива 6 с валом 7 от привода лебедки. Процесс продолжается до тех пор, пока в системе не установится определенное значение давления жидкости, которое зависит от усилий, развиваемых пружиной 24, установленной в гидроцилиндре 18. При достижении заданного значения давления шток 19 преодолевает сопротивление пружины 24 и входит в зацепление с проточкой на штоке 14 гидроцилиндра 13, в результате чего дальнейшее перемещение рабочих органов прекращается, т.е. кинематическая связь силового гидроцилиндра 13 со щкивом 6 и кулачком 15 остается разомкнутой. Тормозное устройство готово как к гтормальным, так и к аварийным условиям работы/
В нормальных условиях, тормозное устройство работает по общепринятым законам, а именно: процесс растормаживания (при спуске или подъеме груза) осуществляется путем включения гидротолкателя 2, который, воздействуя на тормозные элементы, отводит колодки 5 от шкива 6, чем обеспечивается свободное вращение вала 7, процесс торможения осуществляется снятием напряжения с электропривода 3 гидротолкателя 2, в результате чего действие нагрузок на тормозные элементы от гидротолкателя прекращается и под действием усилий, развиваемых пружиной 9 замыкающего звена, колодки 5 обжимают шкив 6,препятствуя вращению вала 7, В аварийной ситуации при внезапном отключении энергии, питающей грузоподъемный механизм, работа тормозного устройства осуществляется в автоматическом режиме по установленной программе. В случае необходимости удержания груза (тормоза в заторможенном состоянии) запорный вентиль 21 с электромагнитом 25 при обесточке остается в положении Закрыто, гидротолкатель 2 отключается, в результате чего тормозные элементы воспринимают нагрузки от пружины 9 зайыкающего звена, удерживаемой штоком 12 в сжатом состоянии, и препятствуют вращению шкива 6 с
валом 7. 1
При необходимости опускания груз
в случае обесточивания запорный вентиль 21 устанавливается заранее с использованием дистанционного управления электромагнитами 25 и 26 на нормальное положение Открыто и занимает это положение при снятии напряжения. При открытом сливном участке канала 22 жидкость из системы под действием пружины 9, сопряженной через тягу 8 и скобу 10 со штоком 12 гидроцилиндра 11, перекачива- ется в полость Г силового гидроци- линдра 13, в результате чего шток 12 перемещается в сторону рабочей полости А, освобождая замыкающее звено от действия нагрузок, передаваемых на тормозные элементы. При определенном давлении в системе тормоз принимает расторможенное состояние, а шток 19 гидроцилиндра 18 выходит из зацепления со штоком 14 силового гидроцилиндра 13. Под действием пружины 23 шток 14 входит в сопряжение с кулачком 15, который совместно с валом 7 и шкивом 6 получил вращательное движение под действием массы транспортируемого груза. Замкнутая кинематическая цепь вращающийся вал - кулачок - шток силового гидроцилиндра обусловливает подачу ж ид- кости из полости Г под давлением в гидросистему.
Скорость опускания груза зависит от соотно пения количества подаваемой жидкости силовым гидроцилиндром JO 13 проходного сечения дросселя 20 на сливном участке канала гидросистемы, так как в зависимости от этого соотношения меняется давление жидкости в рабочей полости А гидро- 15 цилиндра II, а следовательно, меняются положение штока 12 относительно замыкающего звена и зависящая от этого положения нагрузка на тормозных колодках 5. Процесс чередующих- 0 ся заторможенного и расторможет ного состояний тормозных элементов продолжается до полного опускания груза.
В зависимости от производствен- 5 ных условий управление процессом спуска груза может осуществляться вручную. При этом запорный вентиль 21 при обесточке занимает положение Закрыто, а следовательно, тор- 0 моз занимает заторможенное состояние. Процесс растормаживания и опускания груза производит оператор,воздействуя на ручное управление 27 запорного вентиля 21.
Подготовку тормозного устройства к работе после аварийного срабатывания системы производят следующими приемами в зависимости от состояния груза в момент обесточки. 0 В случае, когда груз опущен и в гидросистеме давления жидкости ниже установленной нормы, подготовку производят приемами, соответствующими исходному состоянию тормозного уст- 5 ройства. Для удобства обслуживания рабочая полость В гидроцилиндра 18 сообщается с каналом 22 посредством электромагнитного нормально открытого запорного вентиля 28. При под- 0 готовке к работе вентиль 28 включа- ют в электрическую сеть, при этом вентиль 28 принимает положение Закрыто . При достижении необходимого давления электромагнит вентиля 28 г обесточивают, в результате чего вентиль 28 открывается и жидкость под давлением.из гидросистемы поступает в полость В гидроцилиндра 18, в котором шток 19, преодолевая сопроти5
5
вление пружины 24, входит в зацепление со штоком 14 силового гидроцилиндра и надежно разрывает кинема- тическуто цепь со шкивом. В положении Открыто вентиль 28 остается во все время работы .тормозного устройства .
В случае, когда при аварийном отключении энергии груз удерживается тормозным устройством и не опускается, тормозное устройство без выполнения каких-либо операций готово как к нормальным, так и к аварийным условиям работы.
Формула изобретения
Тормозное устройство, содержащее механизм включения, тормозную пружину замыкающего звена, механизм аварийного растормаживания и связанную с ними и с тормозными элемента868 396
ми рычажную систему с iipy/i Miioi, а также установленный на налу бярлбян, отличающееся тем, что, с целью расширения функциональных
5 возможностей путем обеспечения различных режимов спуска груза в случае аварийного отключения электроэнергии, оно снабжено приводом возвратно-поступательно го перемещения,
10 укрепленным на валу, механизм аварийного растормаживания выполнен в виде двух гидроцилиндров и сообщающейся с ними магистрали с установленными на ее сливном участке регу15 лируемым дросселем и запорным вентилем автоматического действия,причем один из гидроцилиндров кинематически связан с рычажной системой и установлен между одним из рычагов
20 и пружиной, а другой - сопряжен своим штоком с приводом возвратно-поступательного перемещения.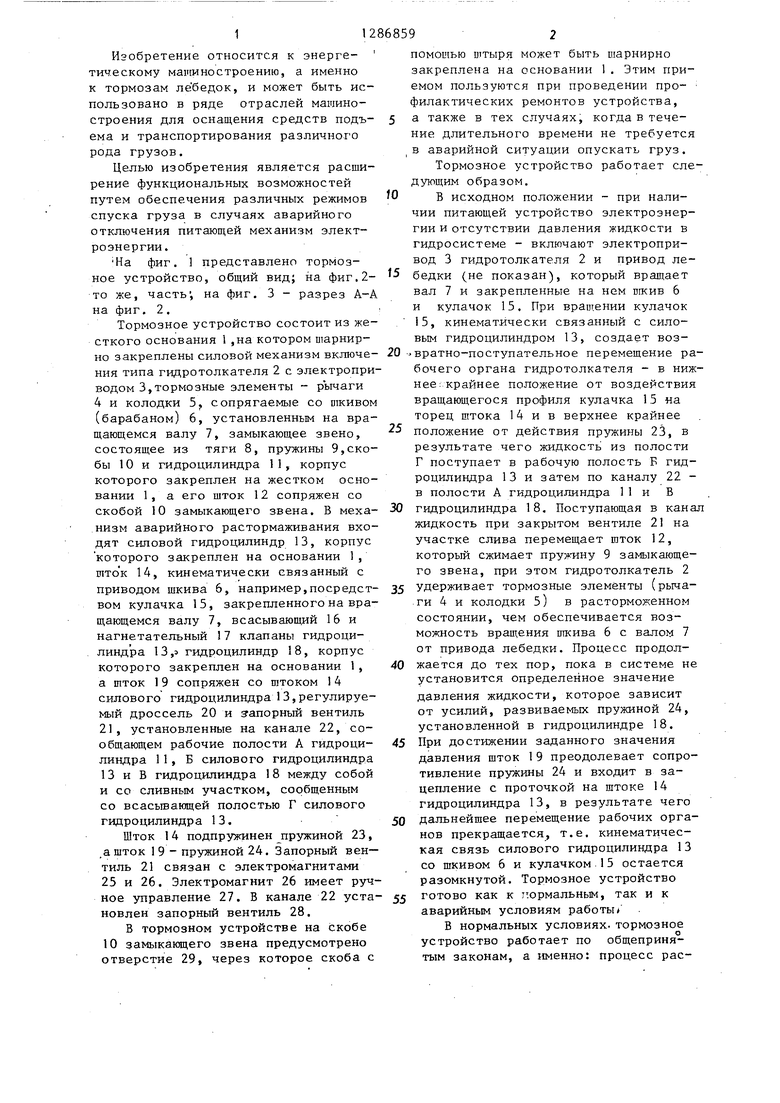
| название | год | авторы | номер документа |
|---|---|---|---|
| Колодочный тормоз | 1983 |
|
SU1081120A2 |
| КОЛОДОЧНЫЙ ТОРМОЗ | 1999 |
|
RU2162437C1 |
| УПРАВЛЯЕМЫЙ КОЛОДОЧНЫЙ ТОРМОЗ ПОДЪЕМНОГО КРАНА | 2004 |
|
RU2282578C2 |
| Колодочный тормоз | 1978 |
|
SU678024A1 |
| ВЕРХНЕПРИВОДНОЕ БУРИЛЬНОЕ УСТРОЙСТВО АНАТОЛИЯ ЛИТВИНОВА | 1995 |
|
RU2105861C1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1969 |
|
SU256023A1 |
| Тормозная система | 1987 |
|
SU1428643A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| Гидравлическая система дистанционного управления тормозом грузоподъемного механизма | 1983 |
|
SU1138550A1 |
| Адаптивная самонастраивающаяся тормозная система ленточного конвейера | 1987 |
|
SU1537617A1 |
Изобретение отно-сится к машиностроению, в частности к тормозам лебедок. Целью изобретения является расширение функциональных возмож- но стей путем обеспечения различных режимов спуска груза в случаях аварийного отключения питающей механизм электроэнергии. Для этого механизм аварийного растормаживания состоит в Vuf.f из двух гидроцилиндров 11 и 13, первый из которых встроен в рычажную систему, а второй сопряжен своим штоком 1 4 с приводом возвратно-поступательного перемещения от вала 7. Скорость опускания груза зависит от соотношения количества жидкости, подаваемой гидроцилиндром 13, и проходного сечения дросселя 20 на сливном участке канала гидросистемы. В зависимости от этого соотношения меняется давление жидкости в рабочей полости гидроцилиндра 11. Это приводит к изменению положения штока 12 относительно замыкающего звена и соответственно к изменению нагрузки на тормозных колодках 5. 3 ил. i СЛ Is9 00 Од 00 О со
15
Фм.
ВНИИПИ Заказ 7700/37 Тираж 811 Подписное Произв.-полигр. пр-гие, г. Ужгород, ул. Проектная, 4
