Известны кулачковые механизмы привода суппортов токарных автоматов с регулированием хода суппорта без смены кулачка.
Предложенный кулачковы механизм отличается тем, что, с целью обеспечения одновременного регулирования как ускоренного, так и рабочего хода суппорта, между постоянным кулачком и тягой суппорта введена кинематически связанная с постоянным ку,1ачком возвратпоподвижная каретка, несущая установочно-поворотнын сухарь с криволинейным кулачковым пазом, но которому посредством тяги иеременл.аетс-1 сунпорт. Контур паза .может быть выполнен либо в виде окружности, сопряжеппой с прямой для возвратио-ностуиательного движення каретки, либо в виде двух сопряженных ду|- различных радиусов для возвратноповоротного движения каретки.
Такая конструкция кулачково1Ч) механизма позволяет производить бесступенчатую переналадку хода суппорта без смены кулачка и более проста по сравнению с известными конструкниямн аналогичных механизмов.
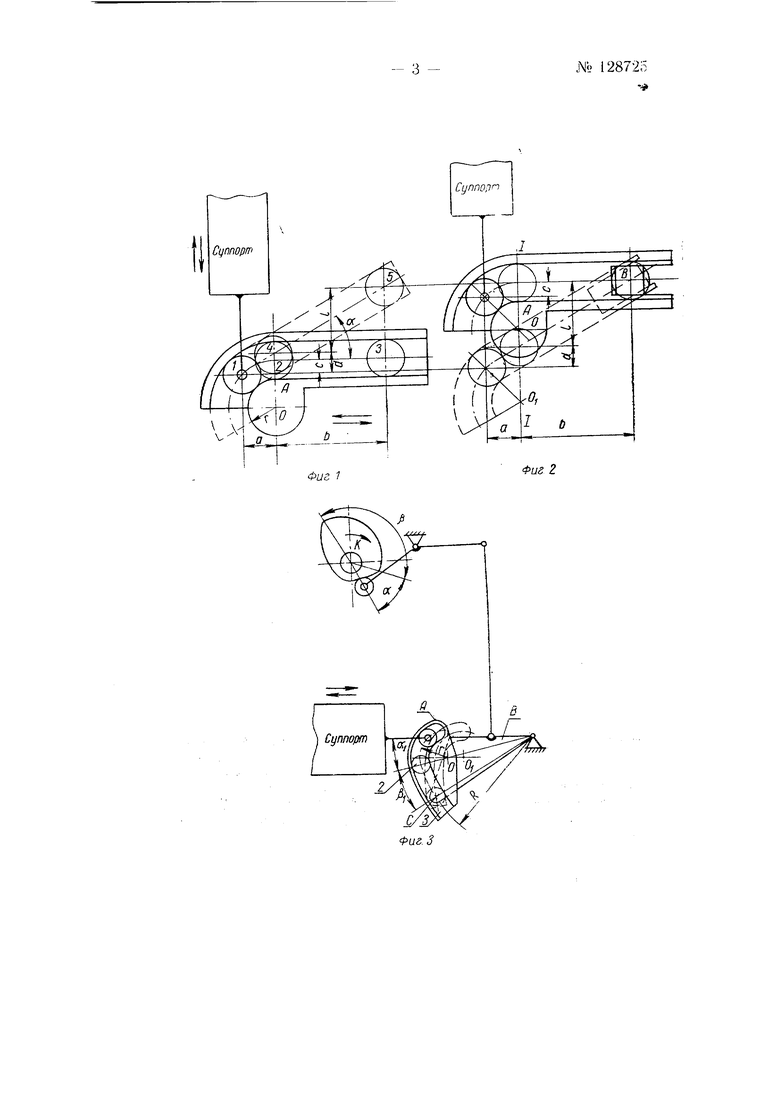
На фиг. 1, 2 и 3 изображены кинематические сх(мы действия предложенного привода.
Если деталь Л (фиг. 1), представляющ,ую собой установочно-иоворотный сухарь с иазом, 1еремест 1ть влево на велич1П1у а, то ролик, катящийся но пазу и связанный с суппортом, переместится из положения / в положение 2, а суппорт на величину с (быстрый подвод). При дальнейшем перемещении каретки влево на величину b ролик будет катиться по ровному участку паза до иоложения 3, но супнорт дополнительного иеремешения не получит (нулевой рабочий ход).
Если же деталь А повернуть на угол ci (как показано на фиг. 1 пунктиром) относительно центра О, то нрн перемещеини каретки на величину а ролнк из ноложения / перейдет в положение 4 (быстры, подвод).
№ 128725- 2 -При перемещении каретки на величину b ролик будет катиться по накуюнной плоскости до кр чного положения 5, а суппорт переместится н%;величину / (рабочийход.)-;
Таким о райом; меняя положение детали А, мы получаем различные величины хода суппорта от нуля до максимального значения (конструктивно воЗйоЖного). Быстрый подвод будет меняться от некоторой величины с до некоторои величины d. При этом суппорт будет иметь постоянное заднее и переменное (в зависимости от рабочего хода) переднее положепие.
Для обеспечения постоянного переднего положения деталь А (сухарь) следует при нереналадках смещать таким образом (фиг. 2), чтобы центр О перемещался по линии /-I, а ось паза скользила относительно точки В, совпадающей с осью суппортного ролика в конце рабочего хода.
Характеристика привода определяется конструктивными параметрами механизма.
На фиг. 3 показан привод от дискового кулачка при возвратно-качательном движении устаповочно-поворотного сухаря.
От дискового кулачка УС приводится в движение кулиса В , на которой закреплен установочно-поворотный сухарь А. При повороте кулачка К на угол а (угол быстрого подвода) кулиса В новериется на угол ui, и ролик суппорта из положения / перейдет в положение 2. При дальнейшем вращении кулачка К на угол 5 (угол рабочего хода) кулиса В повернется на угол |3ь а ролик из положепия 2 перейдет в положение 3, но суппорт перемещения не получит (нулевой рабочий ход), так как центр качания кулисы В совпадает с центром профиля паза.
Если же сместить сухарь А, в положение, показанное на фиг. 3 пунктиром, т. е. так, чтобы центр О, перемещаясь по прямой параллельно направлеппю суппорта, занял положение Оь а. ось паза проходила через точку С, то суппорт получит быстрый подвод при повороте кулисы В на угол г/ь а рабочий ход-при повороте кулисы на угол Pi.
Предмет изобретения
1.Кулачковый механизм привода суппортов токарных автоматов с регулированием хода суппорта без смены кулачка, отличающийся тем, что, е целью обеспечения воз.можности одновременного регулирования как ускоренного, так и рабочего хода сунпорта, между постоянным кулачком и тягой суппорта введепа кинематически связанная с постоянным кулачком возвратно-подвижпая каретка, несущая установочно-поворотный сухарь с криволинейным кулачковым пазом, по которому посредством тяги перемещается суппорт.
2.Механизм по п. 1. о т л и ч а ю щ и и с я тем, что контур криволинейного кулачкового паза установочно-поворотного сухаря выпол}1яют или в внде дуги окружности, сопряженной с прямой для возвратно-поступательного движения каретки, или в виде двух сопряженных дуг различных радиусов для возвратно-поворотного движения каретки.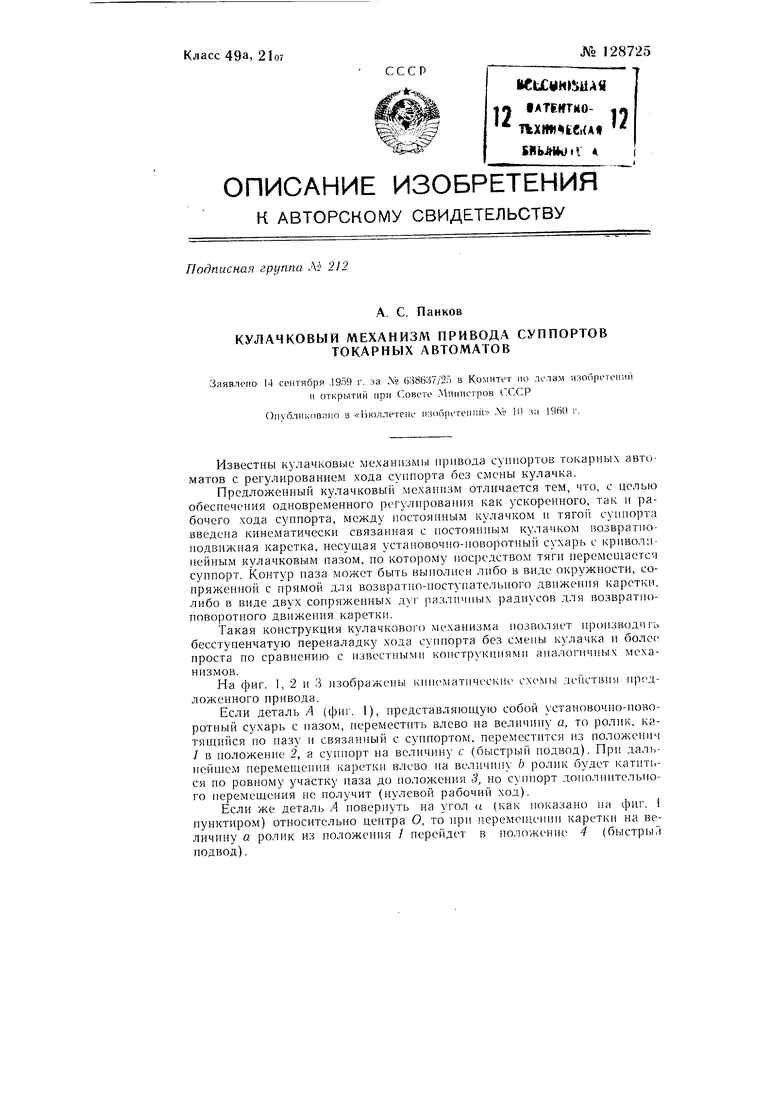
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обработки сложных поверхностей на токарном станке | 1978 |
|
SU764849A1 |
| ЗУБОДОЛБЕЖНЫЙ СТАНОК | 2011 |
|
RU2475341C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 1999 |
|
RU2164860C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| Зажимное устройство к токарно-револьверным и т.п. станкам | 1958 |
|
SU121005A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ПРЕДМЕТОВ | 2001 |
|
RU2220888C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243083C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ИЗДЕЛИЙ | 1996 |
|
RU2142391C1 |
| Автоматический отрезной станок для разрезки металлических, в частности, ферроникелевых, трубок | 1951 |
|
SU96009A1 |