Изобретение относится к технике нанесения покрытия, в частности к автоматическим установкам для нанесения покрытий методом безвоздушного распыления, и может быть использовано в любой отрасли промышленности.
Цель изобретения - обеспечение работы с широкой номенклатурой изделий и повышение качества очистки сопла распылителя.
На фиг.1 изображена автоматическая установка для нанесения покрытия, обш,ий ю вид; на фиг.2 - узел I на фиг.1 (взаимодействия держателя сопла с поворотным устройством в начальный момент программы «Промывка); на фиг.З - то же, при проведении программы «Промывка.
робота 4 включает программу «Промывка. При этом держатель 2 сопла 3 вводится в паз пространственного кулачка 10 (фиг.1, положение «б и фиг.2). При нажатии на кулачок усилием руки робота в направлении его продольной оси он разворачивается в подшипниковой опоре 11, сжимая при этом пружину 13. При этом происходит продольное перемещение кулачка 10 относительно подшипниковой опоры 11.
Разворот и продольное перемеш,ение кулачка 10 происходит за счет скольжения спиралеобразного паза кулачка 10 относительно упора 14, и кулачок 10 совместно с держателем 2 сопла 3 разворачивается отАвтоматическая установка для нанесе- 5 носительно своей продольной оси на 180°. ния покрытия включает распылитель 1 с При этом сопло 3 своей расширяющейся поворотным держателем 2 сопла 3, уста- частью устанавливается наружу и, кроме того, оказывается ориентированным над емкостью 22 для сбора Л КМ. Затем распы20
литель 1 включается и «пробка или сгустки Л КМ выталкиваются наружу в емкость 22.
При последуюш,ем сигнале датчика о наличии рабочего давления в краскоподаю- ш,ей магистрали 6 или по истечении опреновленный на роботе 4, имеющем систему 5 управления, краскоподающую магистраль 6 с установленными на ней насосом 7 высокого давления и баком 8 для лакокрасочного материала (ЛКМ), систему 9 подачи растворителя и блок очистки распылителя. Последний состоит из поворотного устройства, выполненного в виде пространственного кулачка 10, закрепленного в под- 25 деленного времени (отработка программы шипниковой опоре 11 с крышкой 12, на ко-«Промывка) распылитель 1 отключается, и
торый насажена пружина 13, а в спира-робот 4 совершает обратное перемещение
леобразном пазу кулачка установлен упор 14,распылителя на величину паза кулачка 10.
неподвижно закрепленный в опоре 11, ем-При этом кулачок 10 вместе с держателем 2
кости 15 с откидной крышкой 16, имеющей пневмопривод 17 с рычагом 18 и возвратной пружиной 19 и взаимодействующей с конечным выключателем 20, функционально связанным с системой 5 управления робота 4. Блок очистки распылителя 1 смонтирован на опоре 21, на которой установлена также емкость 22 для сбора ЛКМ.
Уст аНовка для нанесения покрытия размещена в камере 23, оборудованной конвейером 24 и датчиками 25 системы слежения за изделием 26. 40 ля 20 дается команда на дальнейшее проУстановка работает следующим образом.ведение программы .«Промывка. Робот 4
Изделия 26, перемещаемые на конвейе- опускает распылитель 1 соплом 3 в емкость 15 ре 24, вводятся в камеру 23, в которойс растворителем. При совершении рукой рораспылитель 1, установленный на роботе 4,бота 4 качательных движений происходит
наносит на изделие покрытие, распыляя очистка наружной поверхности сопла от на- ЛКМ, поступающий по краскоподающей 45 липших частиц ЛКМ за счет их растворе- магистрали 6 из бака 8 с помощью насо- ния (фиг.З, положение «а). Затем робот 4 са 7 высокого давления (фиг.1, положение выводит распылитель 1 из емкости 15. По «а).окончании программы «Промывка емкость
Сигнал о наличии изделия 26 и его ха-15 закрывается вследствие отключения
рактере поступает от датчика 25 системы еле- пневмопривода 17, так как растянутая воз- жения за изделием 26 на систему 5 управ- вратная пружина 19, сжимаясь, вытягивает
сопла 3 разворачивается на 180° усилием 30 пружины 13, жесткость которой регулируется положением подшипника в подшипниковой опоре 11, определяемого размерами выступа крышки 12. Исходное положение пространственного кулачка 10 соответствует исходному положению сопла 3.
35
В этот момент по программе «Промывка включается пневмопривод 17, поворачивающий откидную крышку 16 в положение «Открыто. От конечного выключателения робота 4.
В случае образования «пробки в сопле 3 распылителя 1 по сигналу датчика давления, установленного на выходе насоса 7 (не показан), или профилактически при отсутствии изделий продолжительное время по сигналу датчика 25 системы слежения за изделием система 5 управления
55
шток пневмопривода, разворачивая при этом рычаг 18, закрепленный на оси откидной крышки 16, а робот 4 возвращается в положение «а для проведения операции «Нанесение покрытия.
В дальнейшем, по мере необходимости, операция очистки сопла распылителя повторяется согласно программе.
робота 4 включает программу «Промывка. При этом держатель 2 сопла 3 вводится в паз пространственного кулачка 10 (фиг.1, положение «б и фиг.2). При нажатии на кулачок усилием руки робота в направлении его продольной оси он разворачивается в подшипниковой опоре 11, сжимая при этом пружину 13. При этом происходит продольное перемещение кулачка 10 относительно подшипниковой опоры 11.
литель 1 включается и «пробка или сгустки Л КМ выталкиваются наружу в емкость 22.
При последуюш,ем сигнале датчика о наличии рабочего давления в краскоподаю- ш,ей магистрали 6 или по истечении определенного времени (отработка программы «Промывка) распылитель 1 отключается, и
При этом кулачок 10 вместе с держателем 2
сопла 3 разворачивается на 180° усилием пружины 13, жесткость которой регулируется положением подшипника в подшипниковой опоре 11, определяемого размерами выступа крышки 12. Исходное положение пространственного кулачка 10 соответствует исходному положению сопла 3.
ля 20 дается команда на дальнейшее проВ этот момент по программе «Промывка включается пневмопривод 17, поворачивающий откидную крышку 16 в положение «Открыто. От конечного выключате
шток пневмопривода, разворачивая при этом рычаг 18, закрепленный на оси откидной крышки 16, а робот 4 возвращается в положение «а для проведения операции «Нанесение покрытия.
В дальнейшем, по мере необходимости, операция очистки сопла распылителя повторяется согласно программе.
Формула изобретения Автоматическая установка для нанесения покрытия, содержащая краскоподающую магистраль, распылитель, включающий поворотный держатель с соплом, систему управления и поворотное устройство сопла распылителя, отличающаяся тем, что, с целью обеспечения работы с щирокой номенклатурой изделий и повышения качества очистки сопла,
она снабжена емкостью для растворителя с приводной крышкой, привод которой функционально связан с системой управления, а поворотное устройство сопла распылителя выполнено в виде пространственного подпружиненного кулачка, взаимодействующего с держателем сопла, причем емкость и поворотное устройство установлены на отдельной опоре.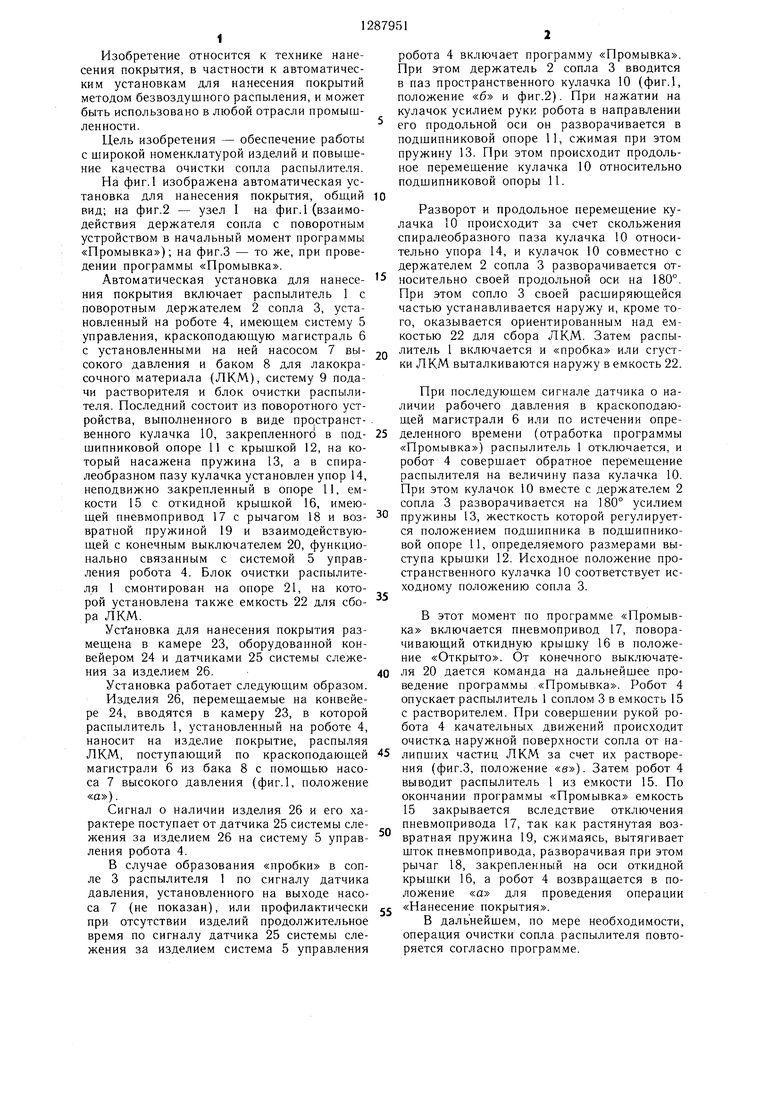
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для нанесения покрытия | 1983 |
|
SU1153999A1 |
| Установка для окраски изделий | 1985 |
|
SU1297928A1 |
| Автоматическая окрасочная линия | 1985 |
|
SU1269850A1 |
| Распылительное устройство для автоматической окраски изделий | 1985 |
|
SU1331584A1 |
| Устройство для нанесения покрытия на внутреннюю поверхность труб | 1982 |
|
SU1063475A1 |
| Установка тупикового типа для очистки изделий | 1990 |
|
SU1824245A1 |
| Пневматический распылитель | 1979 |
|
SU803983A1 |
| Устройство для маркировки изделий | 1991 |
|
SU1794807A1 |
| Устройство для окраски | 1977 |
|
SU626822A1 |
| Устройство для нанесения покрытий | 1978 |
|
SU806140A1 |


Изобретение относится к автоматическим установкам для нанесения покрытия методом безвоздушного распыления и может быть использовано в любой отрасли промышленности. Цель изобретения - обеспечение работы с широкой номенклатурой изделии и улучшение качества очистки сопла. Для этого установка содержит распылитель 1 с поворотным держателем 2 сопла 3, установленный на роботе 4 с системой управления, и блок очистки распылителя, состояший из пространственного подпружиненного кулачка 10, взаимодействую- ш,его с поворотным держателем 2 сопла 3, и емкости 15 с растворителем, откидная крышка 16 которой функционально связана с системой управления робота 4. При образовании пробки в сопле 3 распылителя 1 система управления включает программу «Промывка. При этом держатель 2 сопла 3 нажимает на кулачок 10 и совместно с ним разворачивается на 180°, а сопло 3 своей расширяюш,ейся частью устанавливается наружу. Затем включают распылитель 1 и «пробка выталкивается наружу. Очистка наружной поверхности сопла проис.ходит в емкости 15 при совершении качательных движений рукой робота 4. После промывки согласно программе робот возвращается в рабочее положение для нанесения покрытия. 3 ил. (Л ю 00 со СП 20 ФигЗ
(Pu.f
v)
cvi
vl
CSI
«Nj
| Краскораспылительная установка | 1971 |
|
SU476730A3 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
| Устройство для нанесения покрытия | 1983 |
|
SU1153999A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для окраски | 1977 |
|
SU626822A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
