Изобретение относится к машиностроению и может быть использовано для манипуляторов и робототехнических устройств.
Целью изобретения является повышение быстродействия за счет быстрого подвода губок захватного устройства к объекту и повышение надежности удержания объекта за счет увеличения зажимного усилия.
На чертеже изображена кинематическая схема захватного устройства.
Захватное устройство содержит корпус 1 с фланцем 2 и крышкой 3. Внутри корпуса 1 установлен приводной вал 4, на котором жестко укреплена центральная шестерня 5 планетарного механизма, в состав которого входит водило 6, сателлит 7 и центральное зубчатое колесо 8, свободно посаженное на приводной вал 4. Сателлит 7 состоит из блока зубчатых колес 9 и 10. Центральное колесо 8 жестко соединено с коническим зубчатым колесом 11, которое находится в зацеплении с б.током конических зубчатых колес 12 и 13, жестко укрепленных на оси 14, установленной в крышке 3. Зубчатое коническое колесо 13 находится в зацеплении с зубчатым коническим колесом 15, подвижно укрепленным на крышке 3. С колесом 15 жестко соединен рычаг 16. К крышке 3 ишрнирно присоединен рычаг 17. К рычагам 16 и 17 шарнирно присоединен рычаг 18, на котором укреплена губка 19. Система рычагов-16-18 и крышка 3 образуют шарнирный-параллелограмм.
К фланцу 2 прикреплена неподвижная полумуфта 20,,на торце которой имеются мелкие зубцы 21. На приводном валу 4 установлена подвижная полумуфта 22 со шпонкой 23, вместо шпонки можно выполнить шлице- вое или какое-либо другое соединение, поз- воляюшее продольное перемещение полумуфты с мелкими зубцами на торце 24. Палец 25, являющийся толкателем, закреплен на приводном валу 4 и входит в паз со скосом, являющимся профилем кулачка подвижной полумуфты 22. Пружина 26, насаженная на приводной вал 4, одним концом упирается в неподвижный фланец 2, а другим - в подвижную полумуфту 22.
На шпонке 27, укрепленной в приводном валу 4, подвижно установлен корпус 28. Нружина 29, насаженная на приводной вал 4, одним концом упирается в центральную шестерню 5, а другим - в конус 28.
Захватное устройство работает следующим образом.
При приложении крутящего момента Мц к приводному валу 4 центральная шестерня 5, водило 6 с подвижной нолумуфтой 22, сателлит 7, центральное зубчатое колесо 8 с конусом 28 и коническая шестерня 11 вращаются с валом как одно целое. Пружина 26 обеспечивает силовое замыкание поВНИИПИ Заказ 7756/15 Произвол.-полиграф, пред-с
5
0
5
лумуфты 22 и пальца 25. Уси,1ие пружины должно быть таким, чтобы не было относительного движения между подвижной полумуфтой 22 и пальцем 25 при их совместном вращении. Пружина 29 обеспечивает поджатие конуса 28 к центральному зубчатому колесу 8, в результате чего конус с приводным валом 4 и зубчатое колесо 8 вращаются с одинаковой скоростью.
Вращение с конического зубчатого колеса 11 передается на блок конических зубчатых колес 12 и 13. От колеса 13 движение передается на коническое зубчатое колесо 15, которое поворачивается вокруг своей оси вместе с рычагом 16. Последний передает ДВИЖ1 ние рычагам 18 и 17, а рычаг 18 совершает плоскопараллельное движение. Губки 19 тыстро сходятся и захватывают объект.
В моме Т захвата губками объекта рычаг 18 зат Jpмaживaeтcя, в результате чего прекращай т свое движение конические зубчатые КОЛ1 са 11 -13 и 15, а также центральное зу Зчатое колесо 8. При дальнейшем вращении i риводного вала 4 образуется планетарная гередача, состоящая из водила 6, центральнь X зубчатых колес 5 и 8 и сателлита 7, npiчем конус 28 начинает проскальзывать отн зсительно шестерни 8. Дв1 жение с центральнс и щестерни 5 передавается на водило 6 с п федаточным отно1иением
0
0
5
0
.(6) где 158 - П
%, Is
Zs, Zio
редаточное отно иение от колеса ) к колесу 8 при неподвижном солесе 6; ZB, ZB, / ч, Zio - числа зубьев колес 5.8.9
10.
Переда -очное о Г110шен);е isc зависит от чисел зуб jCB колес 5,8,9 и 10. причем i.is 1,следовательно, i56 0. Таким образом, водило 6 начинает вращаться в сторону, обратную фащенню приводного вала 4, со скоростью в 156 раз мепыме, чем приводной вал 4. Как только водило 6 с подвижной полумуфтой 22 начнут движение в сторону, обратную приводному валу, палец 25 начинает ;вижение по скосу паза подвижной полумуфты 22, тем самым сдвигая ее в сторону не юдвижной полумуфты 20. Происходит сцепление полумуфт и останов водила 6. КРУ ящий момент на вод|1. 6, равный ;Vff, Мц 15н, передается на корпус 1. Момент, П(редаваемый с приводного вала 4 на затормсженное центральное зубчатое колесо 8, р. вен MS MKI SK, соответственно уси.тия, пр 1ложенные к губкам 19, увеличиваются в iss раз. Величина момента Mi.. зависит от подбора величин чисел зубьев колес 5,8,9 и 10.
Ти раж 976Подписное
Ужгород, ул. Г роектная, 4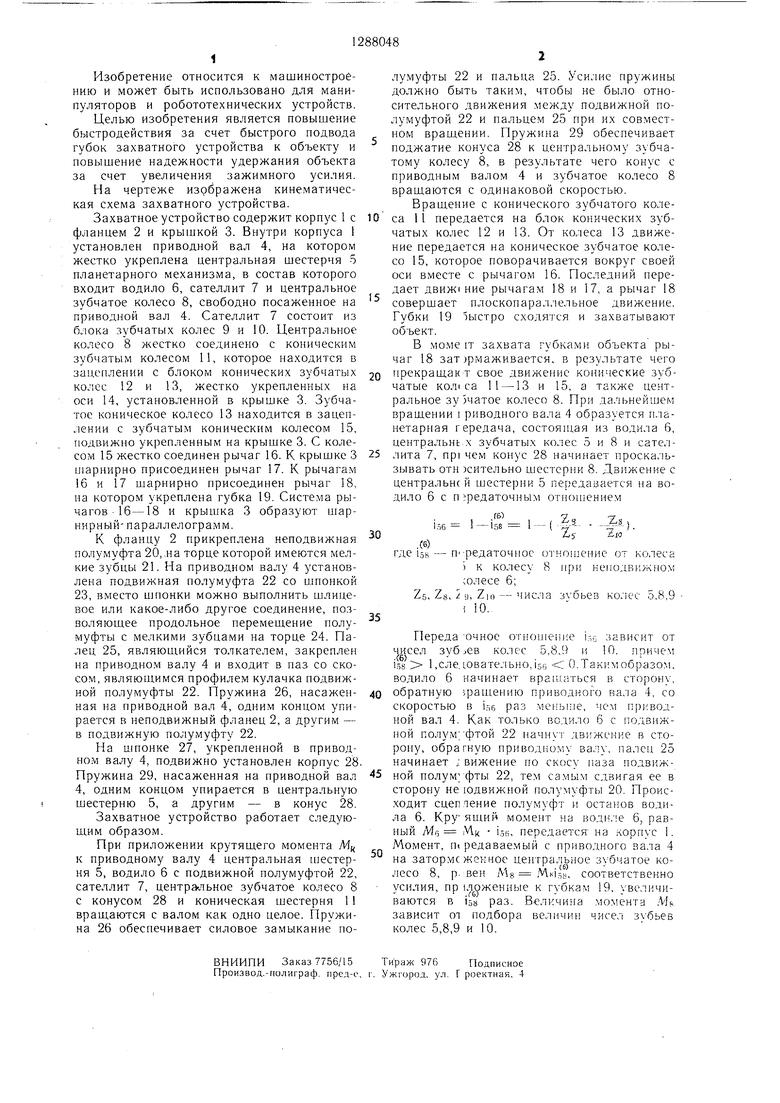
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1255425A1 |
| Револьверная головка | 1990 |
|
SU1787697A1 |
| УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 2006 |
|
RU2307278C1 |
| Захватное устройство манипулятора | 1985 |
|
SU1306711A1 |
| Привод арматуры | 1992 |
|
SU1807278A1 |
| Адаптивное захватное устройство | 1986 |
|
SU1399114A1 |
| РЕЖУЩИЙ ИНСТРУМЕНТ | 2002 |
|
RU2215617C2 |
| Электромеханический привод | 1989 |
|
SU1764850A1 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
| Автомат универсально-гибочный, штамповочный, модульного типа | 1989 |
|
SU1813585A1 |

| Козырев Ю | |||
| Г | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - М.: Машиностроение, 1983, с | |||
| Способ получения суррогата олифы | 1922 |
|
SU164A1 |
