to
Изобретение относится к робототехнике и предназначено для использования в конструкциях промышленных роботов и манипуляторов.
Целью изобретения является повыше- 5 ние надежности работы Захватного устройства.
На чертеже показано захватное устройство.
Захватное устройство состоит из корпуса 1, зажимных губок 2, посредством рычажного механизма 3 соединенных со штангой 4, которая, в свою очередь, сопрягается со штоком 5, расположенным внутри втулки 6 с установленным на ней упругим элементом, например, пружиной сжатия, Один конец упругого элемента 7 жестко закреплен в дополнительном зубчатом колесе 8, которое через .паразитное колесо 9, центральное колесо 10, сателлит 11, водило 12 и солнечную шестерню 13 зубчатого дифференциального механизма соединяется с приводом 14 перемещения губок, а другой конец - в подвижном штоке 5. Зажимные рычаги 15 снабжены зубчатыми cei :Topa- ми, входящими в зацепление с конической зубчатой шестерней 16, соединен15
20
2S
ками 2. Движущий момент привода ( таким образом, разделяется по дву направлениям: на скручивание упру элемента 7 (М ) и на сжатие губ (М,). После окончания переходног процесса деформации упругого элем та 7 момента на дополнительном зу том колесе 8, связанном с ним, до гает определенного предельного зн чения, и вращение этого колеса пр щается. Момент на сжатие губок пр ционален паспортной характеристик привода. Однако в связи с наличие штанги 4, посредством которой мен ся степень заневоливания упругого элемента 7, все устройство реагир на величину массы груза.
Когда губки 2 захватного устро ва сжаты и в них находится объект которого веса (т.е. произведено н Чсшьное зажатие), под действием в объекта губки 2 и рычажный механи стремятся провернуться вокруг оси крепления зубчатых секторов и шта ги 4, что вызывает смещение осей рычажного механизма 3 в пределах зов штанги 4. Реакция от взаимоде вия осей 18 со стенками пазов нап
ной с водилом 12. Для возможности пе- зо -перпендикулярно касательной
ремещения штанги 4 относительно корпуса 1, в ней выполнены дугообразные прорези, а для перемещения штока 5 во втулке 6 имеется горизонтальная проточка. Оси 18 рычажного механизма 3 жестко связаны со штангой 4.
Устройство работает следующим образом.
При получении сигнала с задающего устройства (не показано) привод 14 перемещения губок передает вращение на солнечную шестерню 13, а от нее на сателлит 11, центральное колесо 10 и водило 12. С центрального колеса 10 вращение передается через паразитное колесо 9 дополнительному зубчатому колесу 8, которым скручивается упругий элемент 7, закреплен11ьш в нем одним концом, и одновременно от води- ла 12 конической шестерне 16, которая вращает конические зубчатые секторы зажимных рычагов 15, связанные посредством рычажного механизма 3 с губ
ками 2. Движущий момент привода (М, таким образом, разделяется по двум направлениям: на скручивание упругого элемента 7 (М ) и на сжатие губок 2 (М,). После окончания переходного процесса деформации упругого элемента 7 момента на дополнительном зубчатом колесе 8, связанном с ним, достигает определенного предельного значения, и вращение этого колеса прекращается. Момент на сжатие губок пропорционален паспортной характеристике привода. Однако в связи с наличием штанги 4, посредством которой меняется степень заневоливания упругого элемента 7, все устройство реагирует на величину массы груза.
Когда губки 2 захватного устройства сжаты и в них находится объект некоторого веса (т.е. произведено на- Чсшьное зажатие), под действием веса объекта губки 2 и рычажный механизм 3 стремятся провернуться вокруг оси крепления зубчатых секторов и штанги 4, что вызывает смещение осей 18 рычажного механизма 3 в пределах пазов штанги 4. Реакция от взаимодействия осей 18 со стенками пазов направ
в точке контакта и вызывает смещение штанги 4 вправо (величина смещения зависит от длины пазов и веса объекта) . Смещение штанги 4 вправо, в свою очередь, вызывает движение штока 5 в горизонтальной проточке 17 втулки 6, деформацию пружины 7 сжатия, поворот дополнительного зубчатого колеса 9, центрального колеса 10, сателлита 11, водила 12, конической зубчатой шестерни 16 и зубчатых секторов зажимных рычагов 15 через ры- чгикный механизм 3, преобразующий вращательное движение зажимных рычагов 15 в поступательное движение губок 2, увеличивая тем самым усилие зажатия объекта. Чем больше вес объекта, тем больше смещение осей 18 в пазах, перемещение штока 5 и усилие зажатия объекта.
Изобретение позволяет обеспечить нгщежную работу захватного устрой- ста а.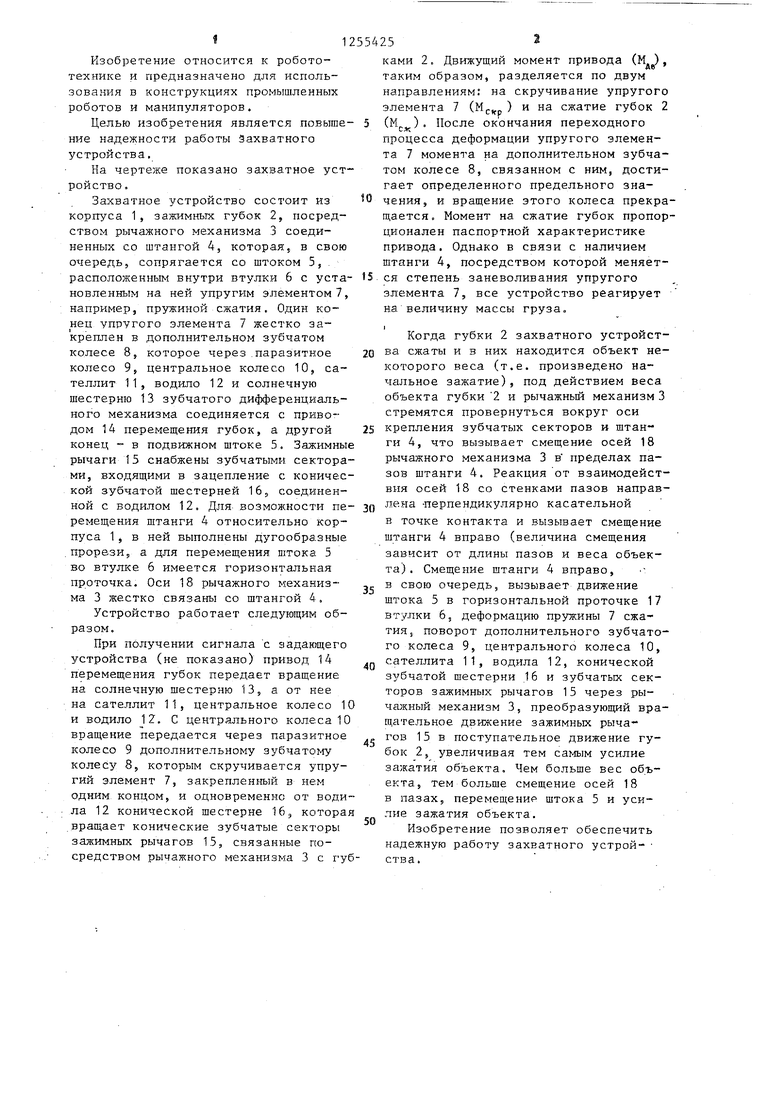
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивное захватное устройство | 1986 |
|
SU1399114A1 |
| Захватное устройство | 1984 |
|
SU1288048A1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| Многопозиционная машина для вставки книжных блоков в переплетные крышки | 1956 |
|
SU119170A1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Захватное устройство промышленного робота | 1985 |
|
SU1313697A1 |
| Устройство для правки горячего проката растяжением | 1975 |
|
SU570428A1 |
| Захватное устройство | 1986 |
|
SU1449340A1 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
| Захватное устройство | 1987 |
|
SU1444143A1 |

Редактор О.Юрковецкая
Составитель Л.Воскобойникова
Техред В.Кадар . Корректор В.Бутяга
Заказ 4764/18 Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва , Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Очувствленный схват манипулятора | 1979 |
|
SU804427A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
