Изобретение относится к мапшиост-хг о нию, а именно к захватным устр() промышленных роботов.
Целью изобретения является расширение технологических возможностей устройства путем обеспечения поворота детали пос,:;е ее захвата.
/ На фиг. 1 изображено предлагаемое устройство, продольный разрез; на фиг. 2 вид А на фиг. 1.
Захватное устройство содержит корпус
I,привод 2 несилового исполиения поворотного типа, втулку 3, в отверстии которой размещен подпружиненный плавающий поршень 4, и хвостовик 5 рабочего органа 6 с встроенным в него подпружиненным, установленным с возможностью поворота фиксатором 7. Втулка 3 снабжена зубчатым полувенцом 8, кинематически связанным с зубчатым полувенцом 9 захвата - шайбы 10 с открытым радиальным пазом
II. Шайба 10 установлена в расточке Д головки рабочего органа 6 и зафиксирована
от выпадания штифтами 12. Осевая фиксация хвостовика 5 и втулки 3 обеспечивается стопорами 13. Во втулке 3 и корпусе 1 выполнены пазы 14, стенки которых пред- назначены для взаимодействия с фиксатором 7, а плавающий поршень 4 кинематически связан с фиксатором 7 посредством штыря 15.
Захватное устройство работает следующим образом.
В исходном состоянии захват находится в раскрытом состоянии: паз 11 шайбы 10 открыт наружу.
Захватное устройство подводится к детали 16 (показана условно), установленной, например, в шпинделе станка (не показан), и открытым радиальным пазом 11 вводится в кольцевую проточку детали 16 до их соосного совмещения. От привода 2 получает вращение втулка 3. При отсутствии давления воздуха на плавающий поршень 4 фиксатор 7 под действием пружины находится в зацеплении с пазом 14 корпуса 1 и стопорит от вращения хвостовик 5 рабочего органа 6. Втулка 3 поворачивается и через зубчатую пару 8 и 9 поворачивает щайбу 10 в расточке Д головки рабочего органа 6 на 180°. Радиальный паз 11 шайбы 10 поворачивается внутрь го ловки рабочего
5
0
5
о 5
органа 6 1 фиксирует в образовавшемся замкнутом гнезде деталь 16.
Движен.|ем рычага манипулятора (не пс;казаны) вдоль оси шпинделя деталь 16 освобожда тся из него и перемещается манипуляторе vi, например, к гнезду магазина деталей (н; показан). При необходимости пространст leHHoro переориентирования детали 16 производится подача воздуха в полость корпуса 1 i через имеющиеся во втулке 3 каналы во:.дух подводится к плавающему поршню -. Последний перемещается и через штьпь 15 поворачивает фиксатор 7 в положен: е, когда он фиксируется в пазу 14 втулки 3. Теперь от привода 2 втулка 3 поворач вается вместе с хвостовиком 5 рабочего органа 6 относительно корпуса 1 и, следовательно, поворачивается вся головка захват юго устройства вместе с деталью 16. Фиксация положения захвата 10 вместе с аеталью 16 по углу поворота обеспечива тся соответствуюшими устройствами на приводе 2 (не показаны).
, Расфиксация детали 16 в свободном гнезде магазин; деталей производится аналогичным образом в обратном порядке срабатывания эл ментов устройства.
Рормула изобретения
Захвати )е устройство, содержащее корпус, рабочий орган с хвостовиком и захватом и привод, отличающееся тем, что, с целью расши)ения технологических возможностей путем обеспечения поворота детали после ее захвата, в корпусе выполнен паз, а устройств ) снабжено установленной в корпусе с воз южностью поворота втулкой с зубчатым венцом и пазом и с размещенным в ее (тверстии подпружиненным плавающим по)щнем, при этом захват выполнен в виде установленной с возможностью поворота ц айбы с открытым радиальным пазом и зуьчатым сектором, предназначенным для вз; имодействия с зубчатым венцом втулки, npt этом хвостовик рабочего органа размен ,ен в отверстии втулки и снабжен подпружине 1НЫМ установленным с возможностью поворота фиксаторо.м, предназначенным для взаимодействия с одной стороны со стенками пазов корпуса и втулки, а с другой - с под фужиненным плавающим поршнем.
ВидА
11
Фиг. 2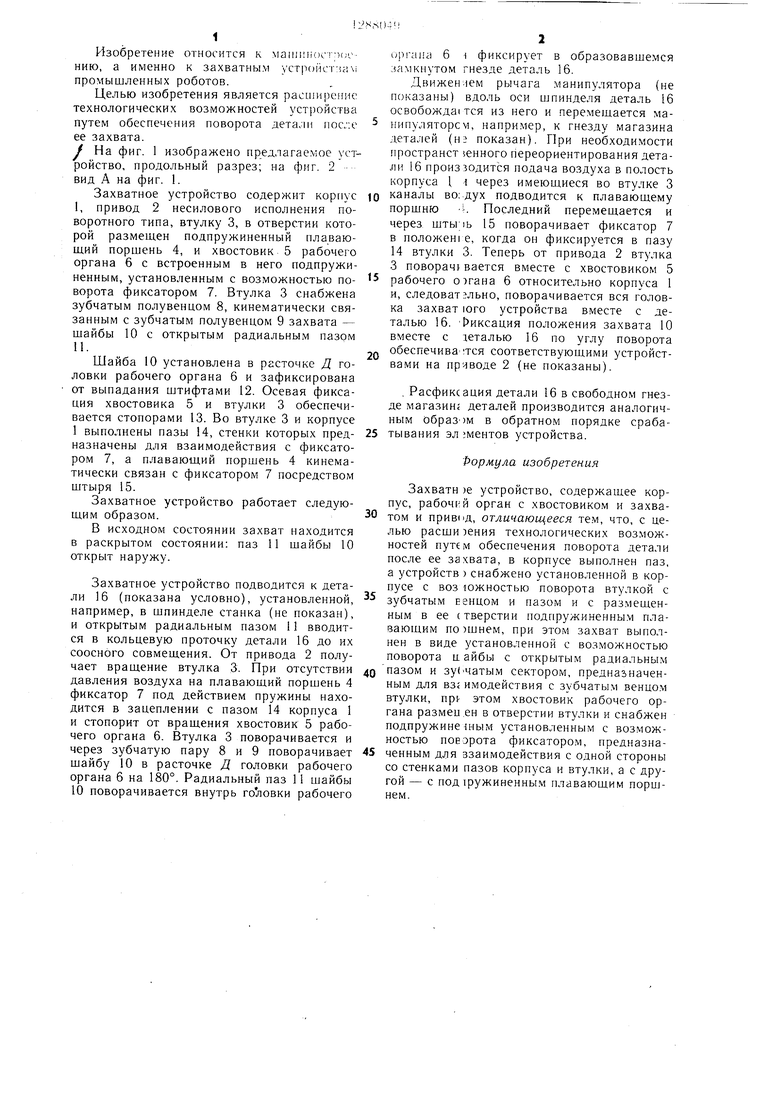
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической смены инструмента | 1985 |
|
SU1329942A1 |
| Устройство для подачи полосового материала к прессу | 1984 |
|
SU1279712A1 |
| Револьверная головка | 1988 |
|
SU1696158A1 |
| Планшайба | 1986 |
|
SU1371845A1 |
| Устройство для сборки корпусных деталей с комплектующими | 1988 |
|
SU1511042A1 |
| ГИДРОПРИВОД ДИСКРЕТНОГО УГЛОВОГО ХОДА | 2012 |
|
RU2497027C1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| УСТАНОВКА ДЛЯ ИЗМЕЛЬЧЕНИЯ ИЗНОШЕННЫХ ПОКРЫШЕК | 1993 |
|
RU2042510C1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Минипулятор | 1990 |
|
SU1743849A1 |
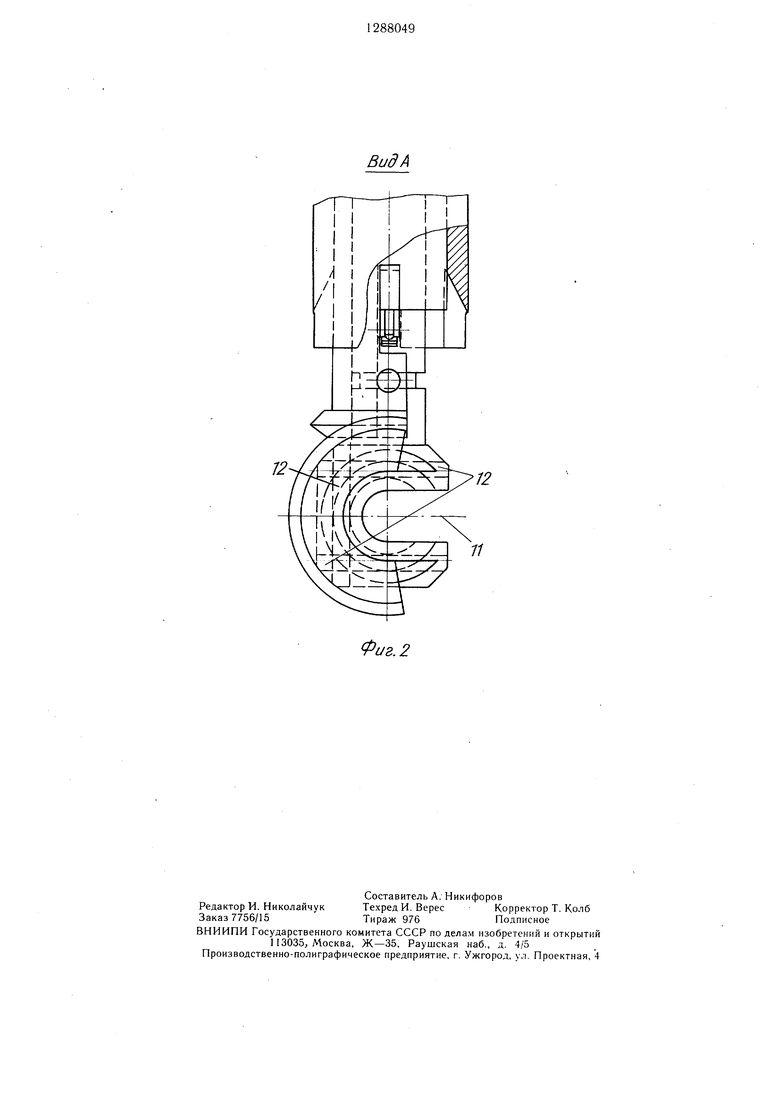
Изобретение относится к области машиностроения; а именно к захватным устройствам промышленных роботов, и позволяет расширить технологические возможности путем использования одного привода для захвата детали и ее поворота. Захватное устройство содержит корпус 1, привод 2, втулку 3, в отверстии которой размеп1еп подпружиненный плавающий 4, х-востовик 5 рабочего органа 6 с подпружиненным с возможностью поворота фиксатором 7. Втулка 3 имеет зубчатый венец 8, кинематически связанный с зубчатым полувенцом 9 захвата - И1айбы 10 с открытым радиальным пазом. Во втулке 3 и корпусе 1 выполнены пазы 14, стеики которых предназначены для взаимодействия с фиксатором 7, а плаваюи-1ий поршень 4 кинематически связан с фиксатором 7 посредством П1тыря 15. 2 ил. (Л г- to 00 оо о 4 О Фиг 1
| Схват промышленного робота | 1982 |
|
SU1021599A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
