каналами управления гидрораспределителя 26 насоса 27, обеспечивающего ускорения отстающей гусеничной тележки 1, сообщена
1
Изобретение относится к горной промыщ- ленности, в частности может быть использовано в проходческо-добычных комбайнах с роторным исполнительным органом и гусеничными тележками с гидравлическим приводом, и предназначено для разработки полезных ископаемых при камерном способе, а также для проведения горизонтальных подготовительных выработок и очистных работ.
Цель изобретения - стабилизация движения комбайна на забой.
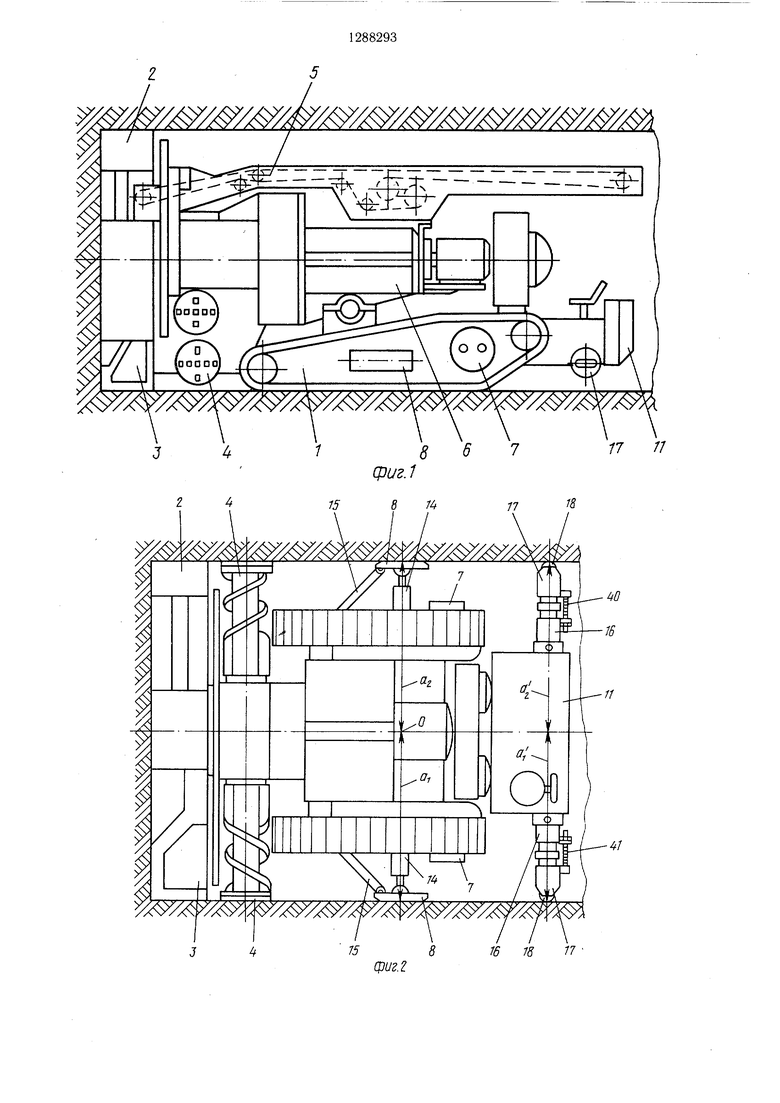
На фиг.1 изображен предлагаемый комбайн, вид сбоку; на фиг.2 - то же, вид в плане; на фиг.З - то же, вид сзади (датчики контактируют с калибровочными дорожками боковых стенок выработки); на фиг.4 - боковая лыжа с калибрующим ножом; на фиг.5 - комбайн, вид сзади (датчики контактируют с боковыми стенками); на фиг.6 - гидромеханическая схема комбайна.
Проходческо-добычный комбайн содержит гусеничные тележки 1, роторный отбойный орган 2, ковщовый погрузочный орган 3, бермовые фрезы 4, перегрузочный конвейер 5, основную раму 6, опирающуюся на гусеничные тележки 1 с приводными гидромоторами 7, боковые лыжи 8, установленные на гусеничных тележках 1 ходовой части с возможностью распора в прямолинейные участки (фиг.З) боковых стенок 9, сформированных бермовыми фрезами 4 выработки 10, маслобак-буфер 11, закрепленый на хвостовой части комбайна.
Гусеничные тележки 1 служат для подачи комбайна на забой при прохождении горной выработки 10, а также для транспортировки комбайна по выработкам. Привод гусениц гидравлический от высокомоментно- го гидромотора через двухскоростной редуктор с зубчатыми передачами. Отбойный роторный орган 2 предназначен для раз- рущения горного массива, ковщовый погрузочный орган 3 - для подборки разрущен - ного массива и перегрузки на перегрузочный конвейер 5. Бермовые фрезы 4 служат для придания нижней части боковых стенок 9 выработки 10 прямолинейности, а всему сечению - арочной формы.
Перегрузочный конвейер 5 предназначен для транспортировки разрушенного массива в бункер-перегружатель, установленный в
магистралями 28 и 29. Для ограничения выдвижения щупов 17 предусмотрены ограничители. I з.п.ф-лы, 6 ил.
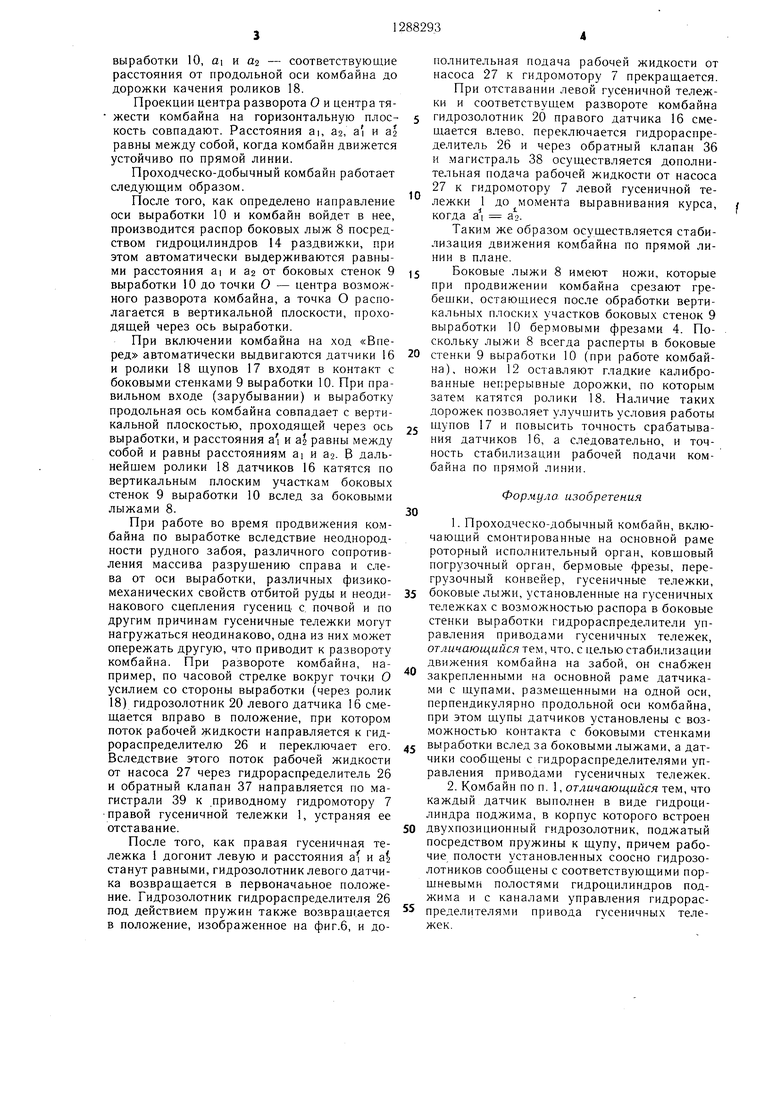
выработке за комбайном, или в иные средства транспортировки руды из выработки 10. Боковые лыжи 8 (фиг.4) имеют ножи 12 для срезания гребешков, оставляемых бермовыми фрезами 4, и формирования гладких дорожек 13 (фиг.З) на прямолинейных участках боковых стенок 9 выработки 10. Лыжи 8 прикреплены к гусеничным тележкам 1 посредством гидроцилиндров 14 раздвижки и
тяг 15 с шарнирным сочленением.
К маслобаку-буферу 11 слева и справа по ходу комбайна прикреплены датчики 16 с щупами 17, причем их продольные оси совпадают и перпендикулярны продольной оси комбайна. Щупы 17 датчиков 16 выполнены
5 с роликами 18, установленными с возможностью контакта с прямолинейными участками боковых стенок 9 выработки 10, сформированных бермовыми фрезами 4 по дорожке 13 вслед за боковыми лыжами 8. Каждый из датчиков 16 (фиг.6) выполнен в виде гидроцилиндра поджима, в корпусе 19 которого встроен двухпозиционный гидрозолотник 20, поджатый посредством пружины 21 к щупу 17. Рабочие полости золотников 20 сообщены с поршневыми по5 лостями гидроцилиндров 22 поджима магистралями 23, с каналами управления гидрораспределителей 24 приводных гидромоторов 7 на ход «Вперед - магистралями 25, с каналами управления гидрораспределителя 26 дополнительного насоса 27, предназ0 наченного для ускорения отстающей гусеничной тележки, магистралями 28 и 29. Приводные гидромоторы 7 гусеничных тележек 1 сообщены с насосами 30 и 31 через каналы управления гидрораспределителей 24 магистралями 32-35.
5 Для подачи дополнительного потока рабочей жидкости к гидромоторам 7 при вращении последних на ход «Вперед в случае их отставания предусмотрено сообщение насоса 27 через гидрораспределитель 26, обд ратные клапаны 36 и 37, магистрали 38 и 39 с магистралями 32 и 34.
Для ограничения выдвижения щупов 17
предусмотрены ограничители 40 и 41.
Центр возможного разворота комбайна
в плане, лежащий на пересечении проек5 Ций оси гидроцилиндров 14 и продольной оси комбайна, обозначен через О (фиг.2 и 6). Кроме того, на фиг.2 обозначены а a-i - расстояния от центра до боковых стенок 9
выработки 10, ai и 02 - соответствующие расстояния от продольной оси комбайна до дорожки качения роликов 18.
Проекции центра разворота О и центра тяжести комбайна на горизонтальную плоскость совпадают. Расстояния ai, а, а и а равны между собой, когда комбайн движется устойчиво по прямой линии.
Проходческо-добычный комбайн работает следующим образом.
После того, как определено направление оси выработки 10 и комбайн войдет в нее, производится распор боковых лыж 8 посредством гидроцилиндров 14 раздвижки, при этом автоматически выдерживаются равными расстояния а и а от боковых стенок 9 выработки 10 до точки О - центра возможного разворота комбайна, а точка О располагается в вертикальной плоскости, проходящей через ось выработки.
При включении комбайна на ход «Вперед автоматически выдвигаются датчики 16 и ролики 18 щупов 17 входят в контакт с боковыми стенками 9 выработки 10. При правильном входе (зарубывании) и выработку продольная ось комбайна совпадает с вертикальной плоскостью, проходящей через ось выработки, и расстояния а и al равны между собой и равны расстояниям ai и ао. В дальнейшем ролики 18 датчиков 16 катятся по вертикальным плоским участкам боковых стенок 9 выработки 10 вслед за боковыми лыжами 8.
При работе во время продвижения комбайна по выработке вследствие неоднородности рудного забоя, различного сопротивления массива разрушению справа и слева от оси выработки, различных физико- механических свойств отбитой руды и неодинакового сцепления гусениц, с, почвой и по другим причинам гусеничные тележки могут нагружаться неодинаково, одна из них может опережать другую, что приводит к развороту комбайна. При развороте комбайна, например, по часовой стрелке вокруг точки О усилием со стороны выработки (через ролик 18) гидрозолотник 20 левого датчика 16 смещается вправо в положение, при котором поток рабочей жидкости направляется к гидрораспределителю 26 и переключает его. Вследствие этого поток рабочей жидкости от насоса 27 через гидрораспределитель 26 и обратный клапан 37 направляется по магистрали 39 к .приводному гидромотору 7 правой гусеничной тележки 1, устраняя ее отставание.
После того, как правая гусеничная тележка 1 догонит левую и расстояния а и ai станут равными, гидрозолотник левого датчика возвращается в первоначаьное положение. Гидрозолотник гидрораспределителя 26 под действием пружин также возвраш.ается в положение, изображенное на фиг.6, и до0
5
0
5
0
0
5
0
5
полнительная подача рабочей жидкости от насоса 27 к гидромотору 7 прекращается.
При отставании левой гусеничной тележки и соответствущем развороте комбайна гидрозолотник 20 правого датчика 16 смещается влево, переключается гидрораспределитель 26 и через обратный клапан 36 и магистраль 38 осуществляется дополнительная подача рабочей жидкости от насоса 27 к гидромотору 7 левой гусеничной тележки 1 до момента выравнивания курса, когда а а9.
Таким же образом осуществляется стабилизация движения комбайна по прямой линии в плане.
Боковые лыжи 8 имеют ножи, которые при продвижении комбайна срезают гребешки, остающиеся после обработки вертикальных плоских участков боковых стенок 9 выработки 10 бермовыми фрезами 4. По- . скольку лыжи 8 всегда расперты в боковые стенки 9 выработки 10 (при работе комбайна), ножи 12 оставляют гладкие калиброванные непрерывные дорожки, по которым затем катятся ролики 18. Наличие таких дорожек позволяет улучшить условия работы щупов 17 и повысить точность срабатывания датчиков 16, а следовательно, и точность стабилизации рабочей подачи комбайна по прямой линии.
Формула изобретения
1.Проходческо-добычный комбайн, включающий смонтированные на основной раме роторный исполнительный орган, ковшовый погрузочный орган, бермовые фрезы, перегрузочный конвейер, гусеничные тележки, боковые лыжи, установленные на гусеничных тележках с возможностью распора в боковые стенки выработки гидрораспределители управления приводами гусеничных тележек, отличающийся тем, что. с целью стабилизации движения комбайна на забой, он снабжен закрепленными на основной раме датчиками с щупами, размещенными на одной оси, перпендикулярно продольной оси комбайна, при этом щупы датчиков установлены с возможностью контакта с боковыми стенками выработки вслед за боковыми лыжами, а датчики сообщены с гидрораспределителями управления приводами гусеничных тележек.
2.Комбайн по п. 1, отличающийся тем, что каждый датчик выполнен в виде гидроцилиндра поджима, в корпус которого встроен двухпозиционный гидрозолотник, поджатый посредством пружины к щупу, причем рабочие полости установленных соосно гидрозолотников сообщены с соответствующими поршневыми полостями гидроцилиндров поджима и с каналами управления гидрораспределителями привода гусеничных тележек.
.
.JSV.Nr.N.V..X.V . V.Axv,.X.,..X.,........Л V..N..
17 Л
4J
16 78 77
fO
/б 777 75
фиг.З
777 /- 77 7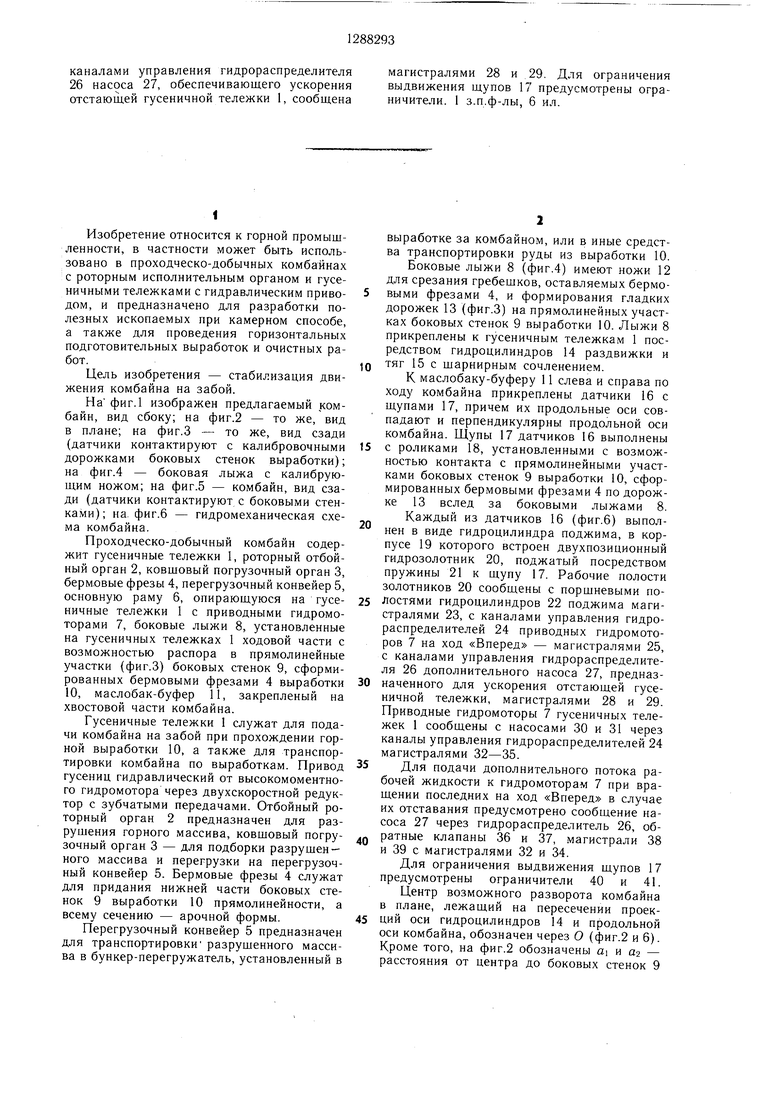
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБАЙН ПРОХОДЧЕСКО-ОЧИСТНОЙ | 2018 |
|
RU2688711C1 |
| КОМБАЙН ШАХТНЫЙ ПРОХОДЧЕСКИЙ | 2006 |
|
RU2324051C1 |
| Проходческий комбайн | 1978 |
|
SU815285A1 |
| Проходческий комбайн | 1975 |
|
SU576407A1 |
| Проходческо-добычной комбайн | 1991 |
|
SU1831572A3 |
| Устройство для управления горнымКОМбАйНОМ | 1979 |
|
SU840351A1 |
| Проходческо-добычной комбайн | 1966 |
|
SU194712A1 |
| Устройство для управления проходческим комбайном | 1977 |
|
SU720155A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЗАГРУЗКИ, ПЕРЕВОЗКИ И ВЫГРУЗКИ СЫПУЧИХ МАТЕРИАЛОВ | 2015 |
|
RU2593308C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА КОМБАЙНА ШАХТНОГО ПРОХОДЧЕСКОГО | 2006 |
|
RU2324053C1 |

Изобретение относится к горной промышленности и может быть использовано при проведении горизонтальных подготовительных выработок и очистных работ. Цель - стабилизация подачи комбайна на забой. Для этого на основной раме, опирающейся на гусеничные тележки 1, на одной оси, перпендикулярной продольной оси комбайна, расположены датчики (Д) 16 со щупами 17. Щупы 17 Д 16 выполнены с роликами 18 для возможности контакта с боковыми стенками выработки. Каждый из Д 16 выполнен в виде гидроцилиндра, в корпусе 19 которого встроен двухпозиционный гидрозолотник (ГЗ) 20. Магистралями 25 рабочая полость ГЗ 20 сообщена с каналами управления гидрораспределителей 24 приводных гидромоторов 7 гусеничных тележек 1 и с $ (Л to СХ) 00 ю ) оо
75
7
/
фигА
10
78 л 1 16
1 16 77
фиг. 5
| Проходческий комбайн | 1978 |
|
SU815285A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Гидропривод механизма подачи горного комбайна | 1973 |
|
SU473823A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| 0 |
|
SU297773A1 | |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Лоханин К | |||
| А | |||
| и др | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
