реверсивный счетчик 1 импульсов, второй блок 12 сравнения, RS-триг- гер 13. Введение первого элемента ИЛИ 3 и по числу координат узлов 4 исключения аварий указанной структуры и соответствующих функциональных
1
Изобретение отнбсится к автоматике и вычислительной технике и мо- жет быть использовано в системах числового программного управления станками.
Целью изобретения является расширение функциональных возможностей устройства за счет увеличения рабочей зоны станка на двойном участке разгона-торможения и обеспечения в ней максимальной скорости.
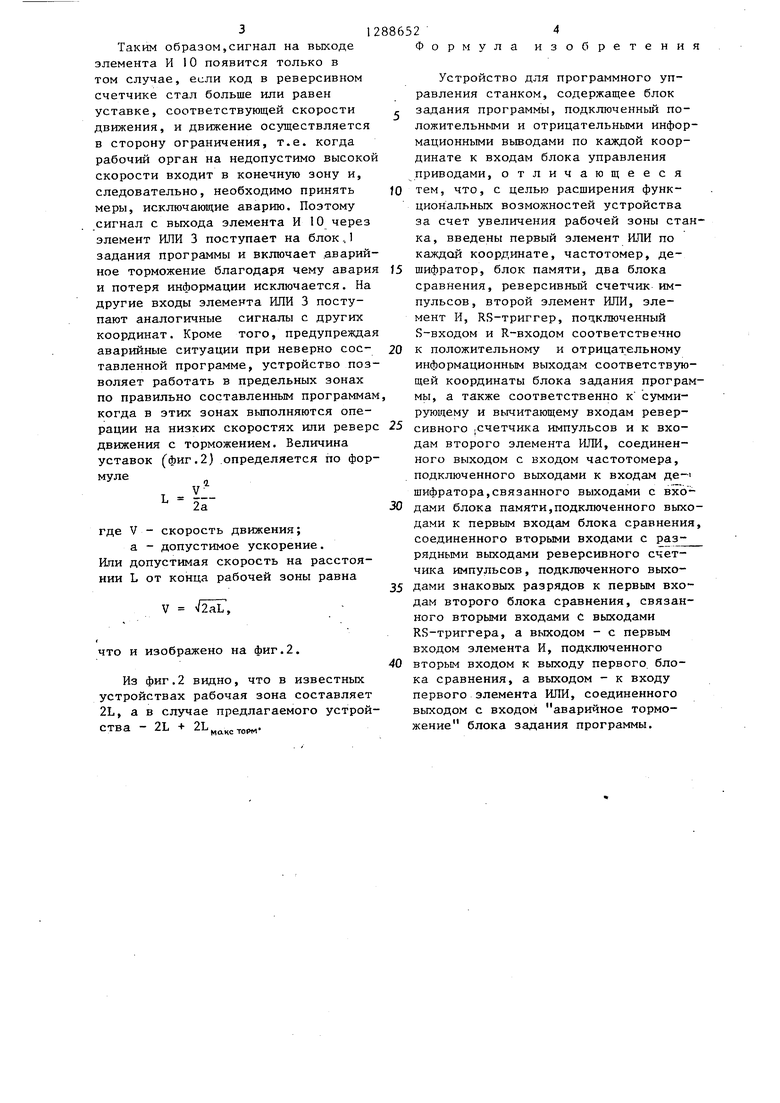
На фиг.1 представлена функцио- нальиая схема предлагаемого устройства; на фиг.2 - график изменения допустимой скорости станка в различных точках рабочей зоны.
Устройство содержит блок 1 задания программы, блок 2 управления приводами, первый элемент ИЛИ 3, по числу координат узлы 4 исключения аварий, каждый из которых содержит второй элемент ИЛИ 5, частотомер 6, дешифратор 7, блок 8 памяти, первый блок 9 сравнения, элемент И 10, реверсивный счетчик II импульсов, второй блок 12 сравнения, RS-триггер 13
Блок 1 задания программы (обработки деталей) может быть реализован на любой известной системе числового программного управления (ЧПУ), например Н22, СЦП-5. Контур 2ПТ с линейным или линейно-круговым интерполятором.
Устройство работает следующим образом.
Первоначально программа обработки .детали вводится в том или ином виде в блок 1 задания программы. В блок В памяти каждой координаты вво- Яятся соответствующие уставки. После чего устройство включают, и выходные сигналы с выхода блока 1 начинают поступать на входы блока 2 управления приводами и одновременно на
288652
связей позволяет обеспечить возможность работы станка на предельных скоростях в конечных зонах, а также повысить надежность за счет кон - тактов и упрощения электросхемы станка. 2 ил.
5
0
5
0
35
40
входы блока 4 исключения аварии, т.е. на входы реверсивного счетчика II импульсов, который определяет таким образом абсолютное положение текутцей точки с учетом знака перемещения, на входы RS-триггера 13, а через элемент ИЛИ 5 - на вход частотомера 6.
Если движение идет в направлении -, то первый же импульс, вьщанный блоком 1 в направлении -, установит RS-триггер 13 в состояние -, при движении в направлении +, наоборот.
Таким образом, триггер 13 как бы запоминает направление движения. Частотомер 6, поскольку он подключен через элемент ИЛИ 5 к выходам направления + и -, непрерывно определяет координатную скорость независимо от ее знака. Каждой скорости, измеренной с помощью частотомера 6, ставится в соответствие своя уставка, которая выбирается из запоминающего устройства 8 с помощью дешифратора 7. Код уставки, соответст- вующий измеренной скорости, воздействует на первый вход блока 9 сравнения, на второй вход которого воздействует код действительного положения рабочего органа с вькода реверсивного счетчика 11 импульсов.
При превышении кодом в реверсивном счетчике 11 импульсов кода устав- йи на выходе блока 9 сравнения фор- мируется сигнал, который поступает на вход элемента И 10, Блок 12 сравнения сравнивает знак движения, определенного триггером 13, со знаком кода в реверсивном счетчике. Если эти знаки совпадают, на выходе блока 12 сравнения появляется сигнал, воздействующий на вход элемента И 10.
312
Таким образом,сигнал на выходе элемента И 10 появится только в том случае, если код в реверсивном счетчике стал больше или равен уставке, соответствующей скорости движения, и движение осуществляется в сторону ограничения, т.е. когда рабочий орган на недопустимо высокой скорости входит в конечную зону и, следовательно, необходимо принять меры, исключающие аварию. Поэтому сигнал с выхода элемента И 10 через элемент ИЛИ 3 поступает на блок,1 задания программы и включает .аварийное торможение благодаря чему авария и потеря информации исключается. На другие входы элемента ИЛИ 3 поступают аналогичные сигналы с других координат. Кроме того, предупреждая аварийные ситуации при неверно сое- тавленной программе, устройство позволяет работать в предельных зонах по правильно составленным программам когда в этих зонах вьтолняются операции на низких скоростях или реверс движения с торможением. Величина уставок (фиг.2) .определяется по формуле
ь 1г
V - скорость движения;
а - допустимое ускорение. допустимая скорость на расстояL от конца рабочей зоны равна
что и изображено на фиг.2.
Из фиг.2 видно, что в известных устройствах рабочая зона составляет 2L, а в случае предлагаемого устройства - 2L + 2L
макс торм
JO J5 0 5
0
5
0
52 4
Формула изобретения
Устройство для программного управления станком, содержащее блок задания программы, подключенный положительными и отрицательными информационными вьшодами по каждой координате к входам блока управления приводами, отличающееся тем, что, с целью расширения функциональных возможностей устройства за счет увеличения рабочей зоны станка, введены первый элемент ИЛИ по каждой координате, частотомер, дешифратор, блок памяти, два блока сравнения, реверсивный счетчик импульсов, второй элемент ИЛИ, элемент И, RS-триггер, подключенный S-входом и R-входом соответственно к положительному и отрицательному информационным выходам соответствующей координаты блока задания программы, а также соответственно к суммирующему и вычитающему входам реверсивного ,счетчика импульсов и к входам второго элемента ИЛИ, соединенного выходом с входом частотомера, подключенного выходами к входам де- шифратора,связанного выходами с входами блока памяти,подключенного выходами к первым входам блока сравнения, соединенного вторыми входами с раз;; рядными выходами реверсивного счетчика импульсов, подключенного выходами знаковых разрядов к первым входам второго блока сравнения, связанного вторыми входами с выходами RS-триггера, а выходом - с первым входом элемента И, подключенного вторым входом к выходу первого, блока сравнения, а выходом - к входу первого элемента ИЛИ, соединенного выходом с входом аварийное торможение блока задания программы.
1/
WATC
Lj
(PLL2.2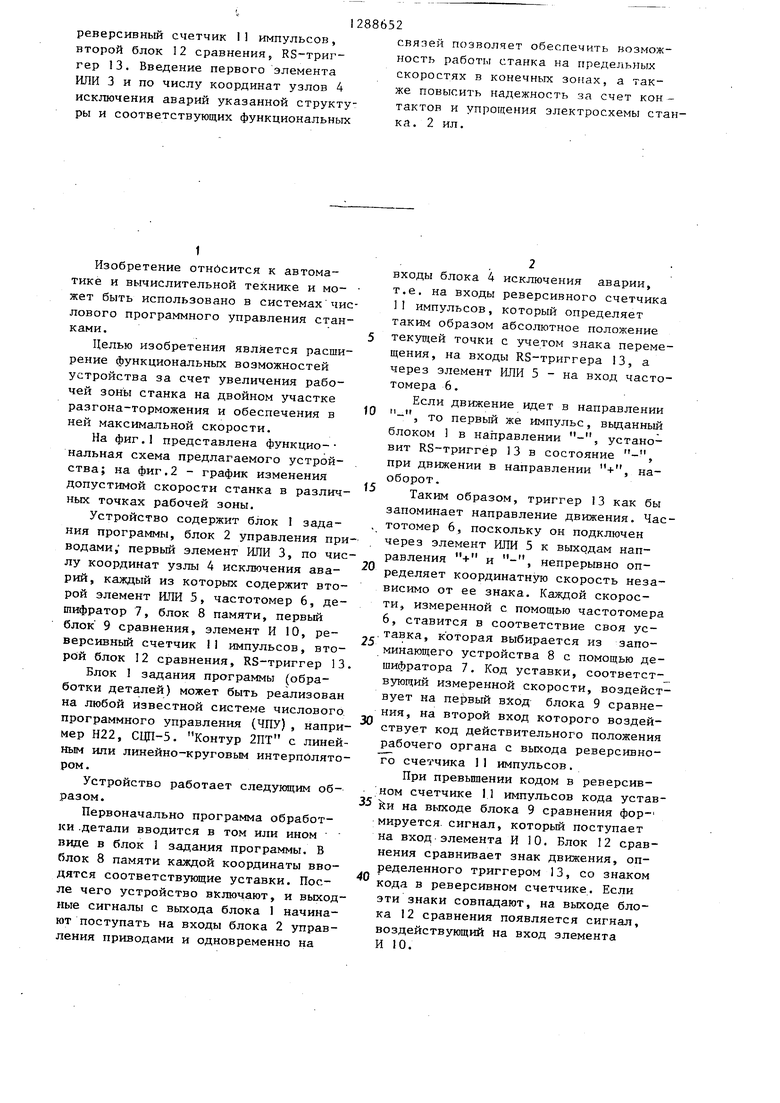
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления станком | 1985 |
|
SU1280573A1 |
| Устройство для программного управления | 1984 |
|
SU1255993A1 |
| Устройство для числового программного управления станками | 1985 |
|
SU1291928A1 |
| Устройство для дробления стружки | 1982 |
|
SU1103199A1 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| Устройство для программного управления станком | 1979 |
|
SU862119A1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Устройство для программного управления скоростью подачи | 1982 |
|
SU1067473A1 |
| Система для программного управления | 1986 |
|
SU1324011A1 |

Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах числового программного управления станками. Цель изобретения расширение функциональных возможностей устройства за счет увеличения рабочей зоны станка на двойном участке разгона-торможения и обеспечения в ней максимальной скорости. Устройство содержит блок 1 задания программы, блок 2 управления приводами, первый элемент ИЛИ 3, по числу координат узлы 4 исключения аварий, каждый из которых содержит второй элемент ИЛИ 5, частотомер 6, дешифратор 7, блок 8 памяти, первый блок 9 сравнения, злемент И 10, § (Л ю 00 00 О5 ел to
| Приводы и системы управления для автоматизации станков | |||
| Сборник, Спец.вьтуск, 1976, с.27 | |||
| Системы числового управления н перспективы их развития: Сборник ./Под ред.Э.Л.Тихомиров а, В.Г.Зусмана, А.Г.Розинова и др | |||
| Электроавтоматика станков, М.: Машиностроение, 1975, с.46. |
