Изобретение относится к маихинострое- нию, а именно к манипуляторам для механизации и автоматизации технологических процессов, включающих подъемно-транспортные и другие операции.
Целью изобретения является повышение точности позиционирования за счет выборки зазоров в звеньях.
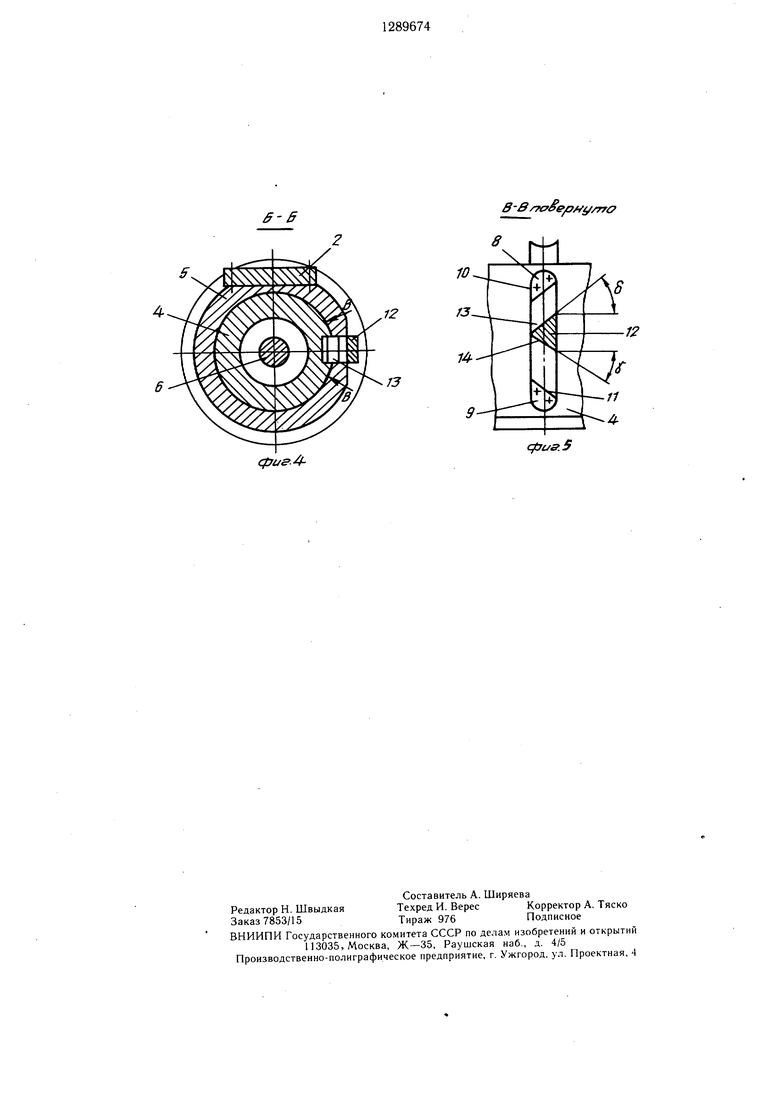
На фиг. 1 представлен манипулятор, общий вид; на фиг. 2, - то же, план; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - разрез В-В на фиг. 4.
Манипулятор состоит из основания 1 и установленных на нем подредством кронш- теинов 2 последовательно соединенных звеньев 3, причем конечное звено 3 несет рабочий орган (не показан). Каждое звено 3 содержит корпус 4, каретку 5 и привод, выполненный в виде силового цилиндра, шток 6 которого связан с кареткой 5, а корпус 4 звена является корпусом силового цилиндра. На цилиндрической поверхности корпуса 4 выполнен продольный паз 7, расположенный вдоль оси корпуса 4, в обоих концах которого установлены вставки 8 и 9 со скосами 10 и 11. На каретке 5 закреплена шпонка 12, установленная в продольном пазу 7 корпуса 4 с гарантированным зазором. На торцовых поверхностях шпонки 12 выполнены скосы 13 и 14, направленные в разные стороны под углом Т. Скосы 10 и 11 на вставках 8 и 9 соответственно параллельны близлежащим скосам 13 и 14 шпонки 12. Угол У скоса больше угла трения.
Каретки 5 последовательно установленных звеньев расположены в трех взаимно перпендикулярных плоскостях (фиг. 1 и 2). Корпус 4 каждого последующего звена 3 жестко связан с кареткой 5 предыдущего звена 3 посредством кронштейна 2. Количество установленных в трех взаимно перпендикулярных плоскостях звеньев 3 опре- деляется технологическим процессом.
0
5 0
0
5
Манипулятор работает следующим образом,.
При подаче рабочего тела в порщневую полость корпуса 4 поршень со штоком 6 выдвигается из корпуса 4 и перемещает связанную с ним каретку 5. Шпонка 12 предотвращает проворот каретки 5 относительно корпуса 4.
В крайнем положении скос 13 шпонки 12 взаимодействует со скосом 10 вставки 8, проскальзывая по нему, благодаря чему шпонка 12 поджимается к правой (фиг. 5) стороне продольного паза 7, выбирая зазор в щпоночном соединении. При подаче рабочего тела под давлением в штоковую полость корпуса 4 шток 6 вдвигается, скос 14 шпонки 12 взаимодействует в крайнем нижнем положении каретки 5 со скосом 11 вставки 9, проскальзывая по нему, и шпонка 12 поджимается также к правой (фиг. 5) стороне продольного паза 7, выбирая зазор в шпоночном соединении в ту же сторону.
Формула изобретения
Манипулятор, содержащий основание, установленные на нем последовательно соединенные звенья с приводами их перемещения, выполненными в виде силовых цилиндров, и рабочим органом, установленным на конечном звене, причем каждое звено состоит из корпуса и каретки, установленной на корпусе с возможностью перемещения относительно него, отличающийся тем, что, с целью повышения точности позиционирования за счет выборки зазора, на корпусе каждого з)зена выполнен продольный паз, в концах которого установлены дополнительно введенные вставки со скоса.ми, а каретка каждого звена снабжена шпонкой, имеющей скосы, соответствующие скосам вставок, угол наклона которых больше угла трения, при этом шпонка установлена в продольном пазу корпуса с возможностью поочередного взаимодействия со скоса.ми вставок.
(pasf
ffJu.Z
&-В
В З/7 7oep/ i /(y
фиа4фи&.5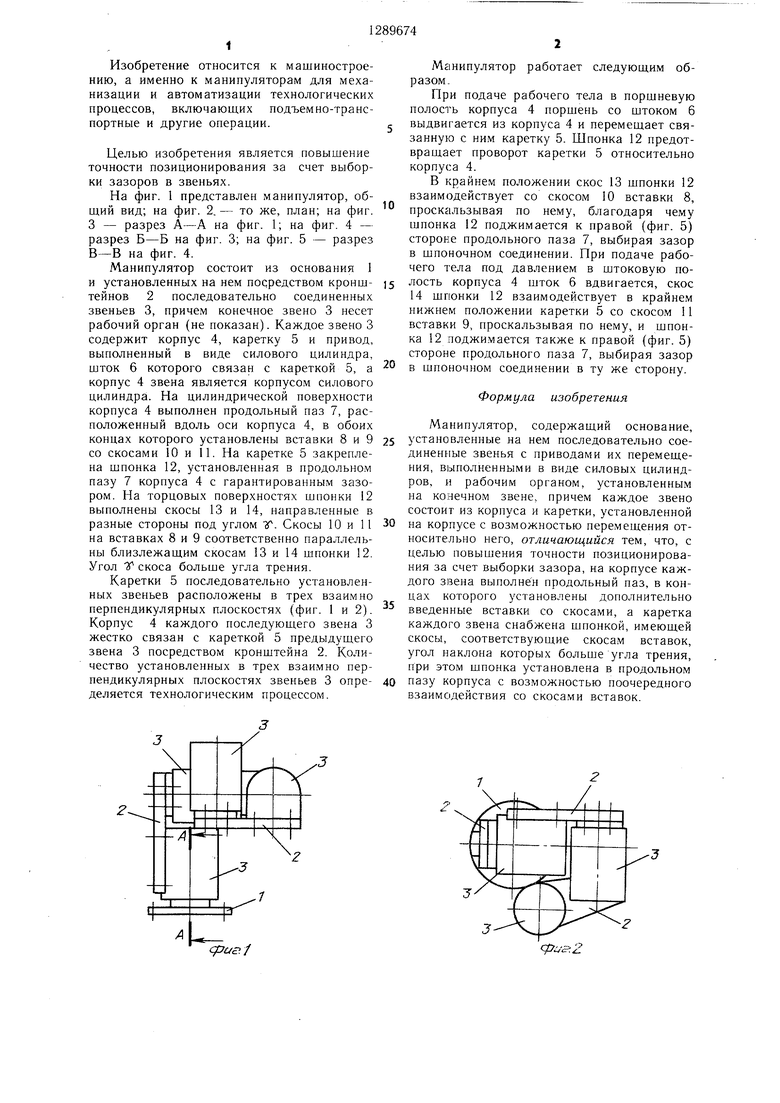
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1657369A1 |
| Устройство для выталкивания червяка из корпуса червячного пресса | 1977 |
|
SU713696A1 |
| ОФСЕТНАЯ РЕЗИНОТКАНЕВАЯ ПЛАСТИНА КОНТРВАЛА ШТАНЦЕВАЛЬНОЙ МАШИНЫ И ПРОЦЕСС ЕЕ ИЗГОТОВЛЕНИЯ | 2016 |
|
RU2708185C1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Устройство для сборки листов магнитопровода | 1989 |
|
SU1737636A1 |
| Расширитель скважин | 1983 |
|
SU1129319A1 |
| Захват промышленного робота | 1986 |
|
SU1316816A1 |
| Инструмент для резки миниатюрных деталей на универсально-гибочных автоматах | 1987 |
|
SU1505622A1 |
| МНОГОЦИЛИНДРОВАЯ ТУРБИНА | 1999 |
|
RU2186990C2 |
| Исполнительное устройство манипулятора | 1986 |
|
SU1366383A2 |
Изобретение относится к машиностроению, а именно к манипуляторам для механизации и автоматизации технологических процессов, включающих подъемно-транспортные и другие операции. Целью изобретения является повышение точности позиционирования исполнительного органа за счет уменьшения зазоров в звеньях. Манипулятор состоит из последовательно соединенных звеньев 3 с приводами их перемещений, установленных на основании и связанных между собой кронштейнами 2. Каждое звено 3 выпонено в виде корпуса 4 и каретки 5, установленной с возможностью перемещения относительно корпуса 4 и удерживаемой от проворота при помощи шпонки 12, установленной с гарантированным зазором в продольном пазу 7, выполненном в корпусе 4. - В концах продольного паза 7 установлены вставки 8 и 9 со cкoca и, а на торцовых поверхностях шпонки 12 также вьп1олне п 1 скосы 13 и 14, соответствующие скосам шпонки 12. Причем угол скосов больше угла трения. При работе силового цилиндра шпонка 12 взаимодействует поочередно с вставками 8 и 9, выбирая зазоры в шпоночном соединении. 5 ил. & 1/// /У//У///////уул o 00 л .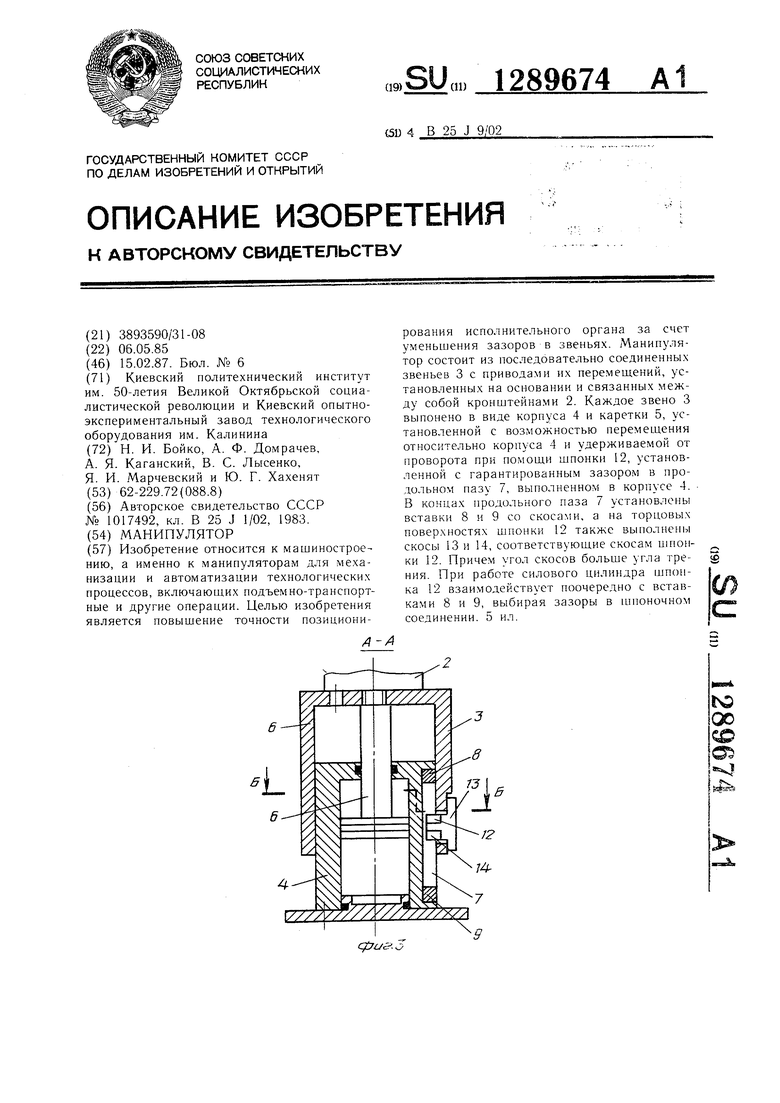
| Исполнительный орган манипулятора | 1982 |
|
SU1017492A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
