11
Изобретение относится к машиностроению, в частности к промьшшенным роботам и манипуляторам для автоматизации технологически} процессов, например в горячеитамповочном производстве.
Целью изобретения является повышение надежности захвата заготовок неправильной геометрической формьз за счет ориентации зажимных губок относительно заготовки и повьшения площади контакта между ними
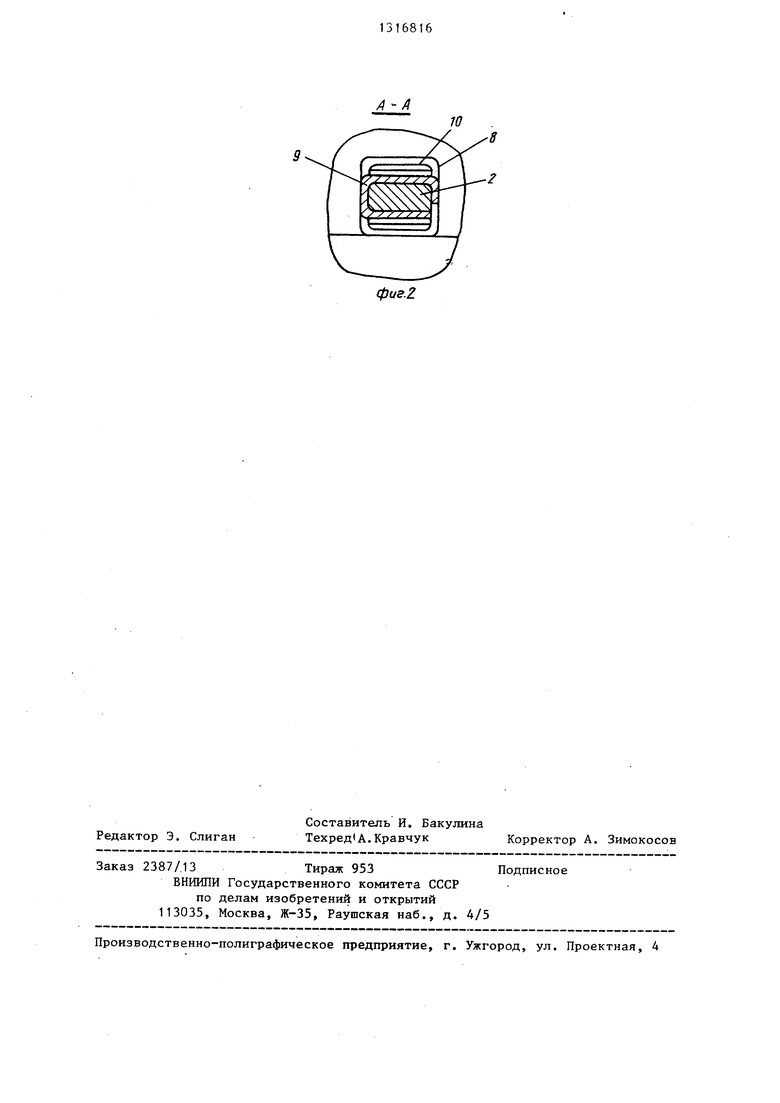
На фиг. 1 схематически изображен захват промьшшенного робота,, общий вид; на фиг, 2 - сечение А-А на фиг,1,
Захват промышленного робота содержит корпус 1, зажимные губки 2, шарнирно установленные на корпусе посредством параллелограммных меха- низмов, каждый из которых состоит из рычагов 3 и 4. Параллелограммные механизмы осуществляют кинематическую связь зажимных губок 2 со штоком силового цилиндра 5. Рычаги 4 своими направляющими пазами 6 вза- имодействуют с элементами 7 сколь-, жения соединительного звена, связанного со штоком силового цилиндра 5. Зажимные губки 2 снабжены гибким элементом 8j выполненным в виде пружины с витками прямоугольной формы, имеющими разные диаметры навивки, при этом часть витков 9 с меньшим диаметром навивки плотно охватывает зажимную губку 2. В пружине 8 витки с разным диаметром навивки чередуются , Зажимные губки 2 посредством гибких элементов 8, а именно витков 10 с большим радиусом навив- ки, осуществляют контакт с облоем 11 заготовки 12 при захвате последней.
Захват промьшшенного робота работает следующим образомо
162
В пространстве между зажимными губками 2 располагается заготовка 12 с облоем 11. При позиционировании захвата относительно заготовки облой
11 расположен на разных расстояниях от оси захвата. Под действием усилия привода шток силового цилиндра 5 перемещается в направлении от заготовки. Движение штока силового цилиндра 5 через, элементы 7 скольжения соединительного звена передается механизму параллелограмма, обеспечивающему равномерное сближение зажимных губок 2, Гибкие элементы 8, установленные на губках 2, взаимодействуют с облоем 11 заготовки 12 поверхностью витков, имеющих больший диаметр навивки. Благодаря их гибкости в радиальных направлениях, а также выполнению витков прямоугольной формы обеспечивается многократное взаимодействие с поверхностью облоя 11 по наибольшей площади. Это приводит
к надежному охватьюанию и гарантированному загкиму заготовки 12,
Режим зажимных губок 2 происходит при движении штока силового цилиндра 5 по направлению к заготовке 12,
Формуле изобретения
Захват промьшшенного робота, содержащий корпус, зажимные губки, кинематически связанные со штоком сило- вог О цилиндра посредством паралле„чограммного механизма, отличающийся тем, что, с целью повышения надежности зажима заготовки, каждая зажимная губка снабжена гибким элементом, вьтолненным в виде
пружины с витками прямоугольной формы, имеющими разные диаметры навивки, при этом часть витков с меньшим диаметром навивки плотно охватывает зажимную губку, и витки с разнът диаметром навивки чередуются.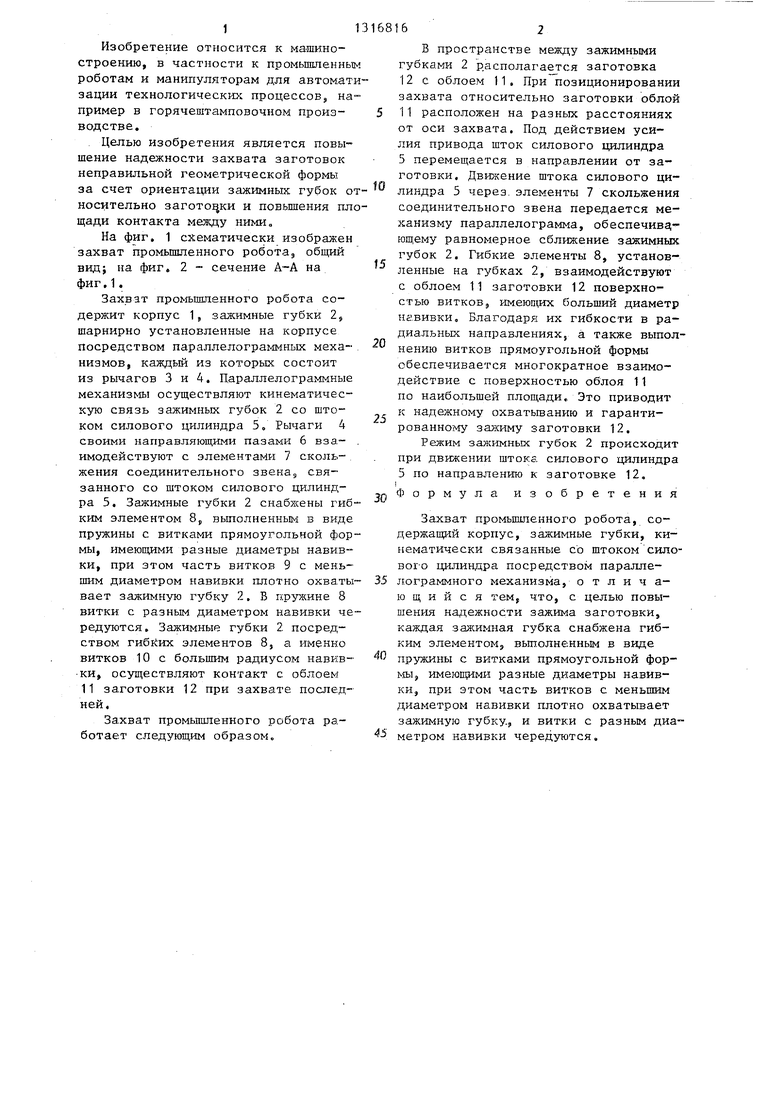
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота Саблина В.П. | 1982 |
|
SU1060470A1 |
| Захват | 1981 |
|
SU984862A1 |
| Схват промышленного робота | 1984 |
|
SU1225782A2 |
| Захват промышленного робота | 1985 |
|
SU1315300A1 |
| Захватное устройство | 1985 |
|
SU1316814A1 |
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| МАШИНА ДЛЯ ПРОИЗВОДСТВА ВЫДУВНЫХ ИЗДЕЛИЙ ИЗ ТЕРМОПЛАСТОВ | 1973 |
|
SU378324A1 |
| Схват промышленного робота | 1985 |
|
SU1310204A1 |
| Автоматическая линия горячей штамповки | 1981 |
|
SU996037A1 |
| Устройство для загрузки и удаления деталей | 1982 |
|
SU1015995A1 |
Изобретение относится к области машиностроения, в частности к промьш- ленным роботам и манипуляторам для автоматизации технологических процессов, например в горячештамповочном производстве. Целью изобретения явля- ется повышение надежности захвата заготовок неправильной геометрической формы за счет ориентации зажимных губок относительно заготовки и повышения площади контакта между ними. Для этого зажимные губки 2 снабжены гибкими элементами 8, вьшолненными в виде пружины с витками прямоугольной формы, имеющими разные диаметры навивки. Часть витков 9 пружины с меньшим диаметром навивки плотно охватывает зажимную губку 2, и витки с разным диаметром навивки чередуются. При позиционировании захвата относительно заготовки 12 облой 11 от оси захвата расположен на разных расстояниях.Движение штока силового цилиндра 5 обеспечивает равномерное сближение зажимных губок 2. Гибкие элементы 8 зажимных губок 2 вваймодействуют с обло- ем 11 заготовки 12 поверхностью витков 10, имеющих больший диаметр навивки, и благодаря их гибкости в радиальных направлениях, а также выполнению витков прямоугольной формы обеспечивают многократное воздействие с поверхностью облоя 11 по наибольшей площади. 2 ил. i (Л
Редактор Э. Слиган
Составитель И. Бакулина
Техред А.Кравчук Корректор А. Зимокосов
Заказ 2387/.13Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Грузозахватное устройство | 1979 |
|
SU812571A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
