Изобретение относится к устройствам для . кантования и может быть использовано в любой отрасли машиностроения, в частности в атомном машиностроении и котлостроении, при изготовлении и сборке узлов теплооб- менной аппаратуры.
Цель изобретения - повышение надежности закрепления изделия и безопасности труда.
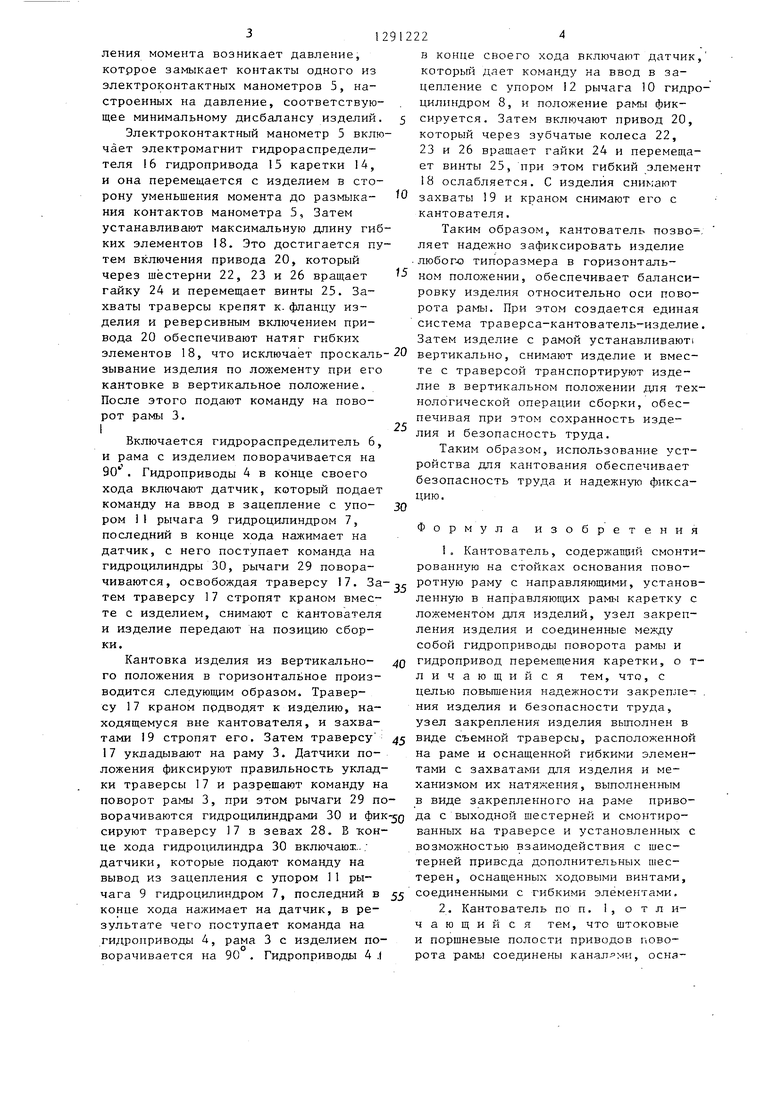
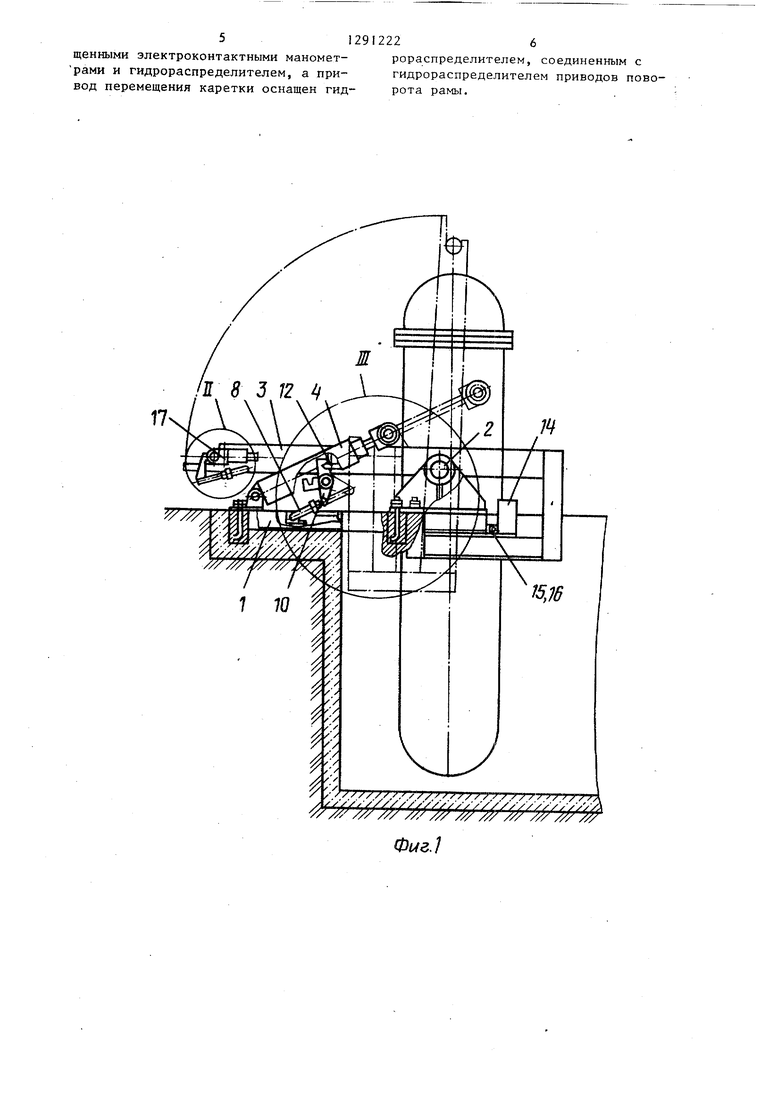
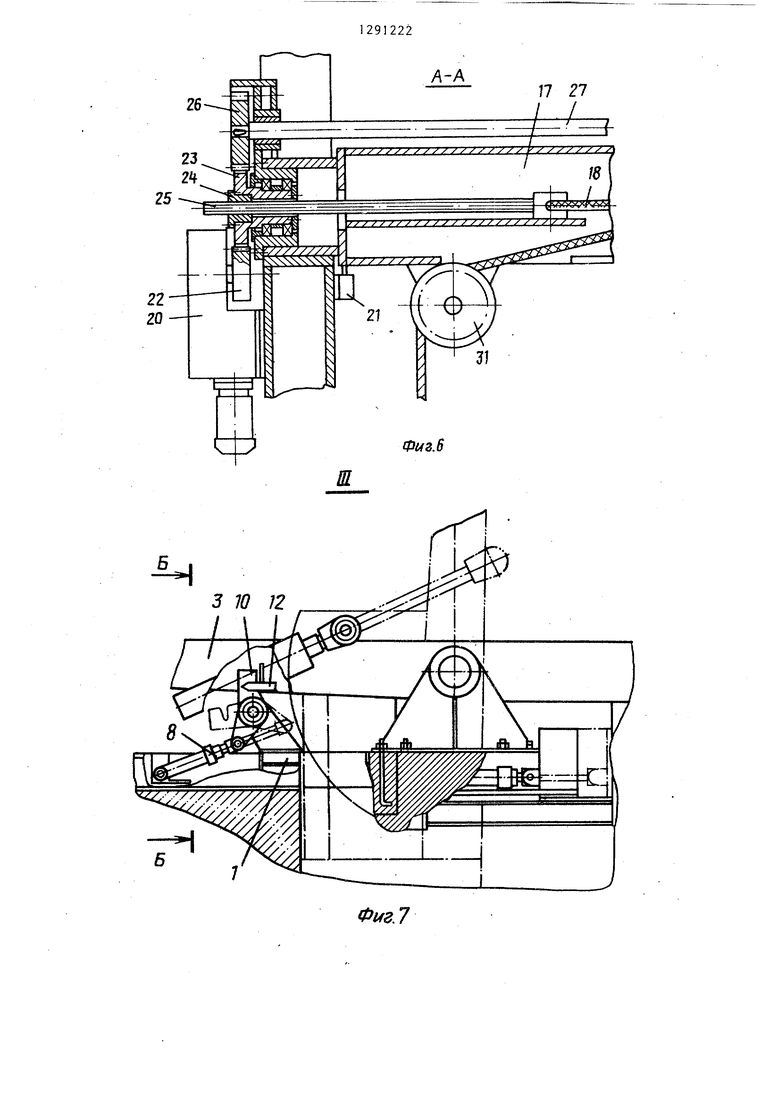
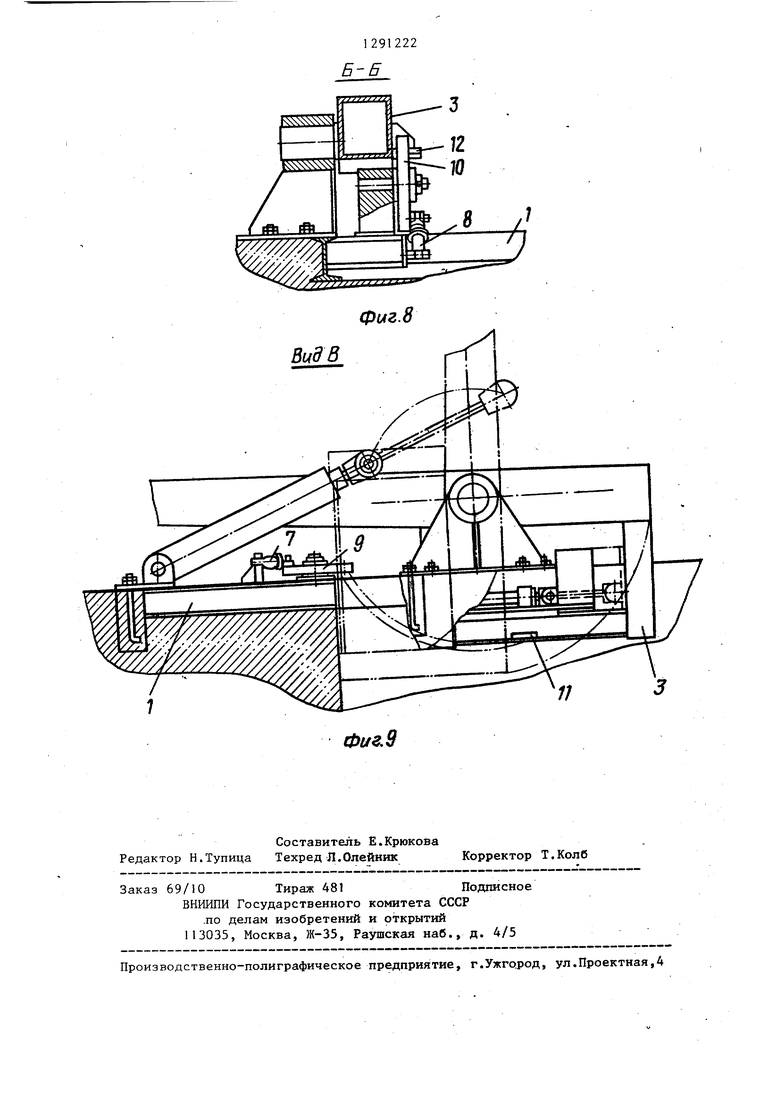
На фиг.1 изображен кантователь, общий вид; на фиг.2 - то же, вид сверху; на фиг.З - гидравлическая схема соединения гидроприводов поворота рамы; на фиг.А - узел I на фиг.2; на фиг.З - узел II на фиг.1; на фиг.6 - сечение А-А на фиг. 5; на фиг.7 - увел III на фиг.1; на фиг. 8 - сечение Б-Б на фиг.7; на фиг.9 - вид В на фиг.2.
Кантователь содержит основание 1, на стойках которого закреплены цапфы 2, в которых установлены оси поворота выполненной в виде П-образ- ной платформы рамы 3. Приводом поворота рамы 3 являются расположенные по ее краям гидроприводы (гидроцилиндры) 4, каждый из которых шарнир- но связан с основанием 1 и с рамой 3. Штоковые Г и поршневые Д полости гидроцилиндров Д гидравлически соединены между собой и с электроконтактными манометрами 5 и гидрораспределителем 6. Манометры предназначены для контроля балансировки рамы с изделием по центру тяжести относительно оси поворота рамы. На основании 1 смонтированы приводные от гидроцилиндров 7 и 8 рычаги 9 и Ю, взаимодействующие с упорами 11 и 12, размеЙ1енными на раме 3. Рычаги предназначены для фиксации вертикального и горизонтального положения рамы.
На направляющих 13 рамы установлена с возможностью перемещения каретка 14 с ложементом для изделия.
Перемещение каретки 14 производится гидроприводом (гидроцилиндром) 15, щток которого шарнирно соединен с кареткой 14.
Поршневая и штоковая полости гидропривода I5 соединены между собой и связаны с гидрораспределителем 16, электромагниты которого электрически связаны с гидрораспределителем 6 и манометрами 5.
Кантователь оснащен узлом закрепления изделия, выполненным в виде с
5
0
5
съемной грузоподъемной траверсы I7 с гибкими элементами 18, оснащенными захватами 19 для изделия и механизма натяжения гибких элементов. Механизм натяжения выполнен в виде смонтированного на раме привода 20 с датчиком 21 и выходной шестерней 22 и смонтированных на траверсе 17 дополнительных шестерен 23 с запрес- сованными в них гайками 24 и ходовых винтов 25, соединенных с гибкими элементами 18.
Для синхронизации поворота шестерен 23, расположенных по обе стороны траверсы, на ней смонтированы синхронизирующие шестерни 26 с валом 27.
Траверса I7 устанавливается в зеве 28 рамы 3 и закрепляется рычагами 29, соединеннь ми с гидроцилиндрами 30 их поворота.
На траверсе 17 смонтированы также блоки 31 для гибких элементов 18.
В начале и в конце ходов всех гидроприводов установлены датчики их положения для осуществления полуавтоматического режима работы и блокировок (не показаны).
Кантователь работает следующим образом.
При кантовке изделия из горизонтального положения в вертикальное раму 3 устанавливают в горизонталь- - ное положение гидроцилиндрами 4 и фиксируют рычагом 10 за упор 12 гидроцилиндром 8., Каретку 14, перемещая по направляющим 13 гидроприводом I5, устанавливают в середине его хода. На раму 3 краном устанавливают траверсу 17, рычагами 29 вводят ее в зевы 28. При этом шестерня 22 привода 20 входит в зацепление с шестерней 23,срабатывает датчик, указывающий, что траверса правильно установлена, т.е. что она вошла в зацепление с шестерней 22 привода 20 и привод подготовлен к включению. На каретку 14 укладывают краном изделие, грубо совмещая его центр тяжести с осью поворота,рамы 3.
После этого дрдают команду на устранение дисбаланса, которая передается на вывод гидроцилиндра 8 ры- 5 чага 10 из зацепления с упором 12. Ввиду того, что гидрораспределитель 6 в закрытом СОСТОЯН11И работает на запор в одной из полостей гидро- цилиндров 4, в зависимости от направ0
5
0
5
0
3
ления момента возникает давление, котррое замыкает контакты одного из электроконтактных манометров 5, настроенных на давление, соответствующее минимальному дисбалансу изделий
Электроконтактный манометр 5 вклчает электромагнит гидрораспределителя 16 гидропривода 15 каретки 14, и она перемещается с изделием в сторону уменьшения момента до размыкания контактов манометра 5, Затем устанавливают максимальную длину гиких элементов 18. Это достигается птем включения привода 20, который через шестерни 22, 23 и 26 вращает гайку 24 и перемещает винты 25. Захваты траверсы крепят к. фланцу изделия и реверсивным включением привода 20 обеспечивают натяг гибких
элементов 18, что исключает проскаль-20 вертикально, снимают изделие и вмесзывание изделия по ложементу при его кантовке в вертикальное положение. После этого подают команду на поворот рамы 3. I
Включается гидрораспределитель 6,
и рама с изделием поворачивается на 90 . Гидроприводы 4 в конце своего хода включают датчик, который подает команду на ввод в зацепление с упором П рычага 9 гидроцилиндром 7, последний в конце хода нажимает на датчик, с него поступает команда на гидроцилиндры 30, рычаги 29 поворачиваются, освобождая траверсу 17. За-эг ротную раму с направляющ11ми, установтем траверсу 17 стропят краном вместе с изделием, снимают с кантователя и изделие передают на позицию сборки.
Кантовка изделия из вертикального положения в горизонтальное производится следующим образом. Траверсу 17 краном подводят к изделию, находящемуся вне кантователя, и захватами 19 стропят его. Затем траверсу 17 укладывают на раму 3. Датчики положения фиксируют правильность укладки траверсы 17 и разрешают команду на поворот рамы 3, при этом рычаги 29 по40
ленную в направляющих рамы каретку с ложементом для изделий, узел закрепления изделия и соединенные между собой гидроприводы поворота рамы и гидропривод перемещения каретки, о т- л и ч а ю щ и и с я тем, что, с целью повышения надежности закрепле- ния изделия и безопасности труда, узел закрепления изделия вьтолнен в 45 виде съемной траверсы, расположенной на раме и оснащенной гибкими элементами с захватами для изделия и механизмом их натяжения, выполненным в виде закрепленного на раме привоворачиваются гидроцилиндрами 30 и фик-5о да с выходной шестерней и смонтиросируют траверсу 17 в зевах 28. В конце хода гидроцилиндра 30 включаюх,, ; датчики, которые подают команду на вывод из зацепления с упором 11 рычага 9 гидроцилиндром 7, последний в конце хода нажимает на датчик, в результате чего поступает команда на гидроприводы 4, рама 3 с изделием поворачивается на 90 . Гидроприводы 4 .(
55
ванных на траверсе и установленных с возможностью взаимодействия с шестерней привода дополнительных шестерен, оснащенных ходовыми винтами, соединенными с гибкими элементами,
2. Кантователь по п. 1, о т л и- чающийся тем, что штоковые и поршневые полости приводов поворота рамы соединены канал- ми, осна
в конце своего хода включают датчик, который дает команду на ввод в зацепление с упором 12 рычага 10 гидроцилиндром 8, и положение рамы фиксируется. Затем включают привод 20, который через зубчатые колеса 22, 23 и 26 вращает гайки 24 и перемещает винты 25, при этом гибкий элемент 18 ослабляется. С изделия снимают захваты 19 и краном снимают его с кантователя.
Таким образом, кантователь позво-; ляет надежно зафиксиро;вать изделие любого типоразмера в горизонтальном положении, обеспечивает балансировку изделия относительно оси поворота рамы. При этом создается единая система траверса-кантователь-изделие. Затем изделие с рамой устанавливают
те с траверсой транспортируют изделие в вертикальном положении для технологической операции сборки, обеспечивая при этом сохранность изделия и безопасность труда.
Таким образом, использование устройства для кантования обеспечивает безопасность труда и надежную фиксацию.
Формула изобретения
1, Кантователь, содержап(ий смонтированную на стойках основания пово0
ленную в направляющих рамы каретку с ложементом для изделий, узел закрепления изделия и соединенные между собой гидроприводы поворота рамы и гидропривод перемещения каретки, о т- л и ч а ю щ и и с я тем, что, с целью повышения надежности закрепле- . ния изделия и безопасности труда, узел закрепления изделия вьтолнен в 5 виде съемной траверсы, расположенной на раме и оснащенной гибкими элементами с захватами для изделия и механизмом их натяжения, выполненным в виде закрепленного на раме приво5
ванных на траверсе и установленных с возможностью взаимодействия с шестерней привода дополнительных шестерен, оснащенных ходовыми винтами, соединенными с гибкими элементами,
2. Кантователь по п. 1, о т л и- чающийся тем, что штоковые и поршневые полости приводов поворота рамы соединены канал- ми, осна512912226
щенными электроконтактными маномет- рораспределителем, соединенным с рами и гидрораспределителем, а при- гидрораспределителем приводов пово- вод перемещения каретки оснащен гид- рота рамы.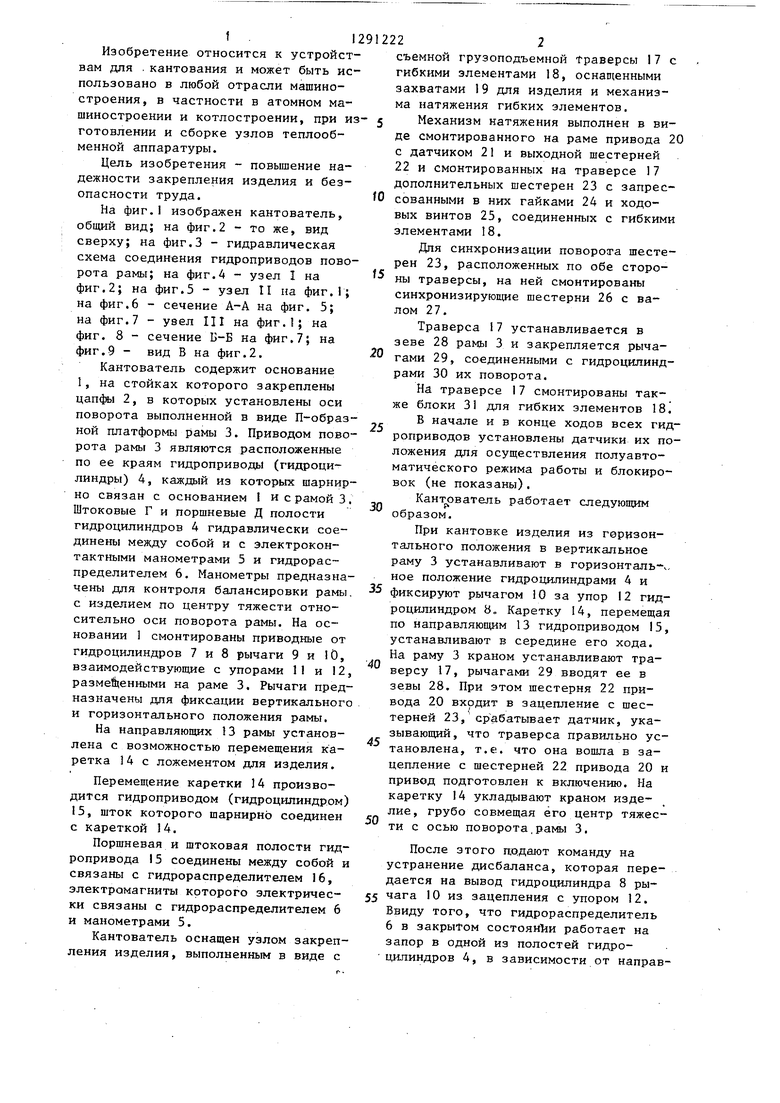
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| СТЕНД ДЛЯ СБОРКИ И ДВУСТОРОННЕЙ СВАРКН ЛИСТОВОГО МАТЕРИАЛА В ПОЛОТНИЩА | 1973 |
|
SU366951A1 |
| Устройство для перегрузки изделий | 1982 |
|
SU1065316A1 |
| Стенд для испытания рукавов высокого давления | 1989 |
|
SU1670459A1 |
| Установка для сварки изделий | 1989 |
|
SU1794616A1 |
| КАНТОВАТЕЛЬ-МАНИПУЛЯТОР | 1991 |
|
RU2063372C1 |
| Устройство для загрузки изделий в тару | 1990 |
|
SU1724519A1 |
| УСТРОЙСТВО ДЛЯ ПРЕССОВАНИЯ ЗАГОТОВОК ОБОЛОЧКИ | 2007 |
|
RU2340445C1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Кантователь длинномерных изделий | 1987 |
|
SU1465389A1 |
Устройство относится к области машиностроения, в частности к устройствам для квантования изделий при сборке и изготовлении узлов теплооб- менной аппаратуры. Цель изобретения повышение надежности закрепления изделия в безопасности труда. Кантователь содержит поворотную раму 3 с установленной в ее направляющих кат- реткой 14, при перемещении которой производится совмещение центра тяжести изделия с осью .поворота рамы. Узел закрепления изделия включает грузоподъемную траверсу 17 с гибкими элементами 18, оснащенными захватами 19. После установки на раму траверсу закрепляют, на изделие устанавливают захваты 19 и осуществляют натяжение гибких элементов путе м поворота соединенных с ними ходовых винтов 25. Поворот винтом производят приводом, смонтированным на раме. 1 3.п. ф-лы, 9 ил. Q (Л 18 7 фиг.2 +ч4
Фиг.1
Ai
л-Д
H
V
A
фиг.
Фие.З
28
30
Фиг.5
тгН
Фиг.7
Б-Б
Фиг.8
ВидВ
11
Фиг.9
| Зажимное приспособление для копировальной рамы | 1949 |
|
SU94470A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
