Изобретение относится к машиностроению и может быть использовано в различных отраслях промышленности при механизации работ.
Цель изобретения - расширение технологических возможностей путем расширения зоны обслуживания.
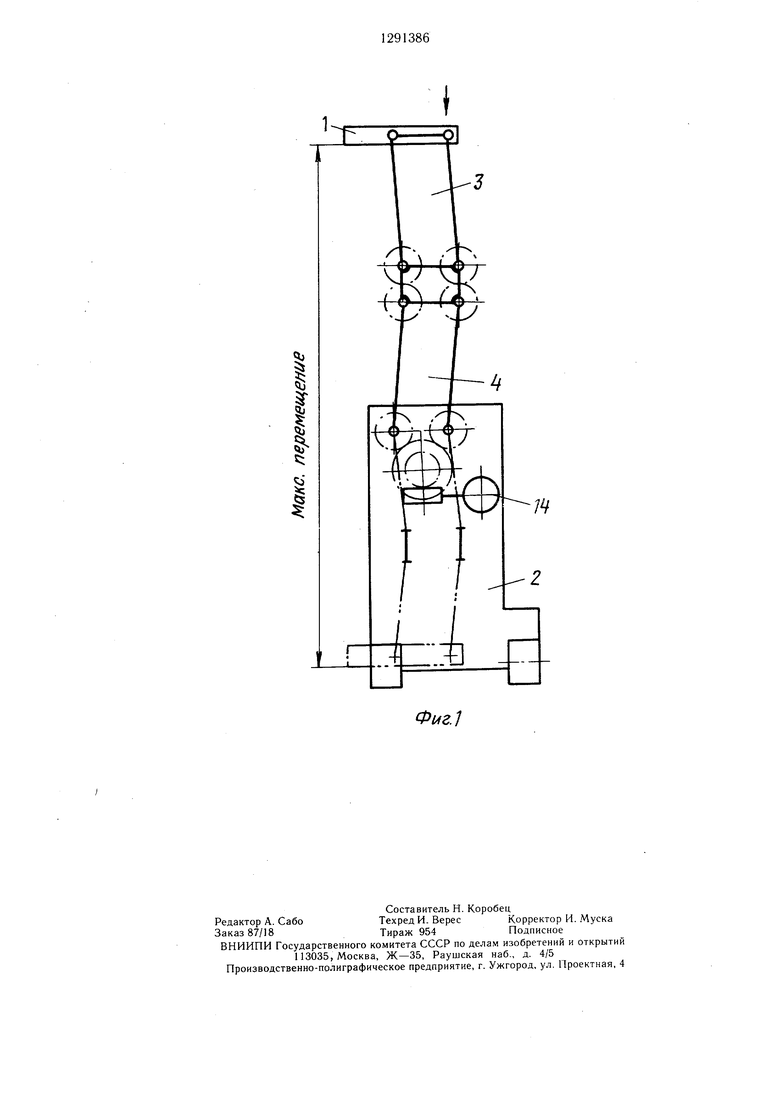
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - вид А на фиг.1.
Манипулятор содержит свободное основное звено 1 с размеш,енным на нем рабо- чим органом (не показан). Свободное основное звено соединено с основанием 2 двумя шарнирно связанными параллелограммными механизмами: ведомым 3 и ведуш,им 4.
Боковые звенья 5 и 6 ведомого парал- лелограммного механизма 3 образованы кри- вошипами с закрепленными на них неподвижно зубчатыми колесами 7 и 8 соответственно. На боковых звеньях 9 и 10 веду- ш,его параллелограммного механизма 4, образованных кривошипами, также неподвижно закреплены зубчатые колеса 11 и 12, сцепленные с зубчатыми колесами 7 и 8 соответственно (передаточное число равно единице). Оси зубчатых колес 7,8,11 и 12 установлены в подшипниках, закрепленных в корпусе 13, боковые звенья 9 и 10 соеди- нены с двигателем 14 посредством закрепленных также на них зубчатых колес 15 и 16 соответственно, которые сцеплены между собой колесом 17, сидящим на одном валу с червячным колесом 18, сцепленным с червяком 19, находящимся на одном валу с двигателем 14.
Боковые звенья 9 и 10, 5 и 6 парал- лелограммных механизмов 3 и 4 смещены друг относительно друга в направлении оси вращения, например, за счет того, что оси зубчатых колес 7 и 8, 11 и 12, представ- ляющие собой часть кривошипов каждой пары звеньев 5 и 6 и 9 и 10 парал- лслограммных механизмов, выполнены различной длины, причем разница выбрана из
условия обеспечения свободного прохождения звеньев друг относительно друга.
Манипулятор работает следующим образом.
Электродвигатель 14 через червяк 19, червячное колесо 18, зубчатые колеса 15 и 16 приводит в движение боковые звенья 9 и 10, на которых неподвижно закреплены зубчатые колеса 11 и 12, сцепленные соответственно с зубчатыми колесами 7 и 8, соедин н- ными неподвижно, соответственно с боковыми звеньями 5 и 6, которые поворачиваются на тот же угол, что и звенья 9 и 10, но в обратном направлении, поэтому свободное основное звено 1 перемещается всегда только по вертикали.
Формула изобретения
Манипулятор, содержащий установленные на основании и последовательно соединенные между собой два параллелограм- мных механизма, одно из боковых звеньев первого из них кинематически связано с приводом его поворота, пр.ичем одни из смежных боковых звеньев параллелограммных механизмов кинематически связаны между собой с помощью зубчатых колес, а свободное основное звено второго параллелограммного механизма снабжено рабочим органом, отличающийся тем, что, с целью расширения технологических возможностей путем расширения зоны обслуживания, другое боковое звено первого параллелограммного механизма также кинематически связано с йри- водом, при этом другие смежные боковые звенья параллелограммных механизмов кинематически связаны между собой дополнительно введенными зубчатыми колесами, а каждое боковое звено параллелограммных механизмов выполнено в виде кривошипа, причем основные звенья параллелограммных механизмов в плане параллельно смещены относительно друг друга.
.1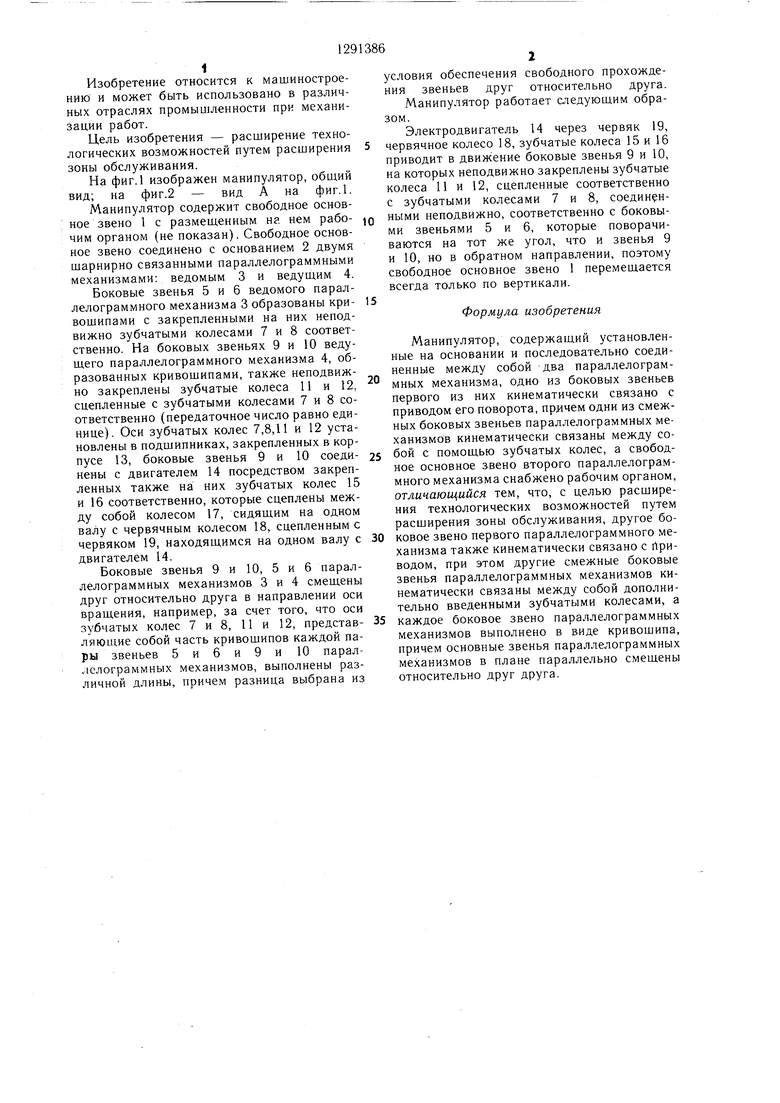
| название | год | авторы | номер документа |
|---|---|---|---|
| Сменное захватное устройство | 1988 |
|
SU1618649A1 |
| Манипулятор | 1984 |
|
SU1192969A1 |
| Летучие ножницы | 1987 |
|
SU1461588A1 |
| Устройство для перегрузки кассет | 1987 |
|
SU1569169A1 |
| Манипулятор | 1986 |
|
SU1454684A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2020 |
|
RU2750997C1 |
| Самосвальное транспортное средство | 1986 |
|
SU1423439A1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| Электромагнитно-акустический преобразователь для контроля тонколистовых материалов | 1976 |
|
SU581427A1 |
| Промышленный робот | 1978 |
|
SU837851A1 |
Изобретение относится к машиностроению и может быть использовано в разработках с целью расширения технологических возможностей. Манипулятор содержит свободное основное звено 1 с размещенным на нем рабочим органом, основание 2, шарнирп 16 но связанные между собой параллелограм- мные механизмы: ведомый и ведущий, причем боковые звенья 9 и 10 ведущего парал- лелограммного механизма кинематически связаны с приводом, при этом смежные боковые звенья 5 и 9, 6 и 10 кинематически связаны между собой зубчатыми колесами, а каждое боковое звено выполнено в виде кривошипа, причем основные звенья парал- лелограммных механизмов в плане параллельно смещены относительно друг друга. Поворот боковых звеньев 9 и 10 через зубчатые колеса передается звеньям 5 и 6, которые поворачиваются на тот же угол, что и звенья 9 и 10, но в противоположном направлении. При этом звено 1 перемещается всегда только по вертикали. 2 ил. Вид А ;к , & (Л с |С ( ОС а о:
| Манипулятор | 1975 |
|
SU601154A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
