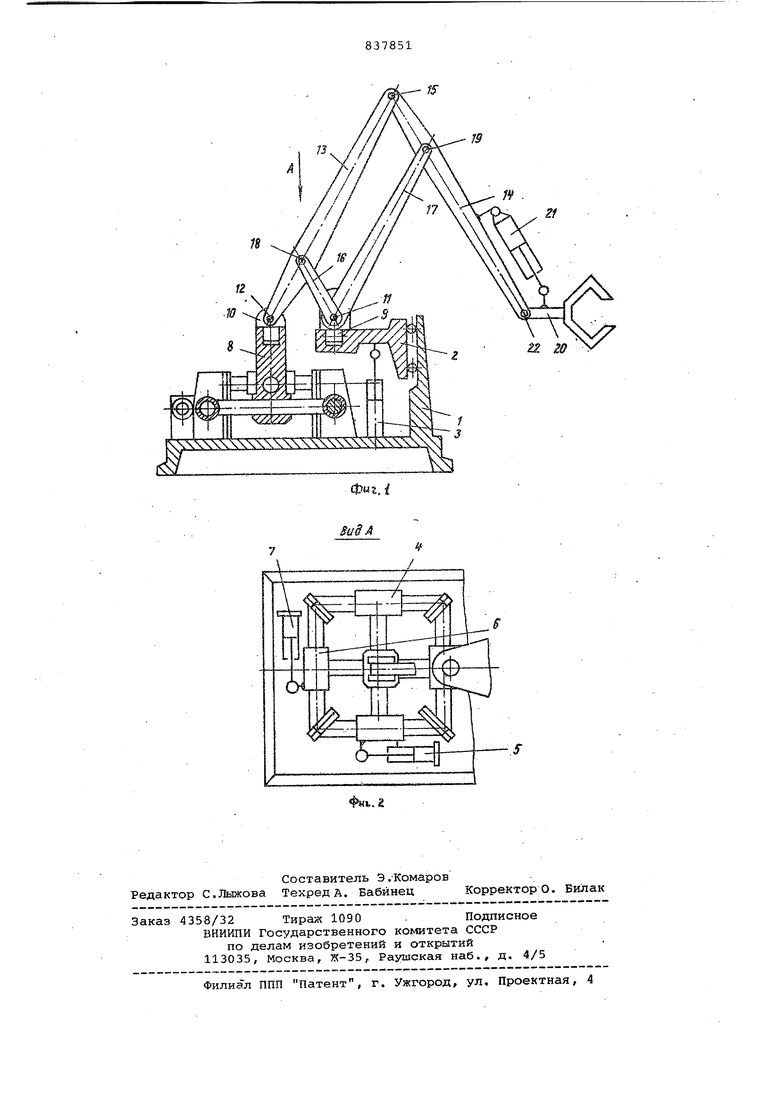
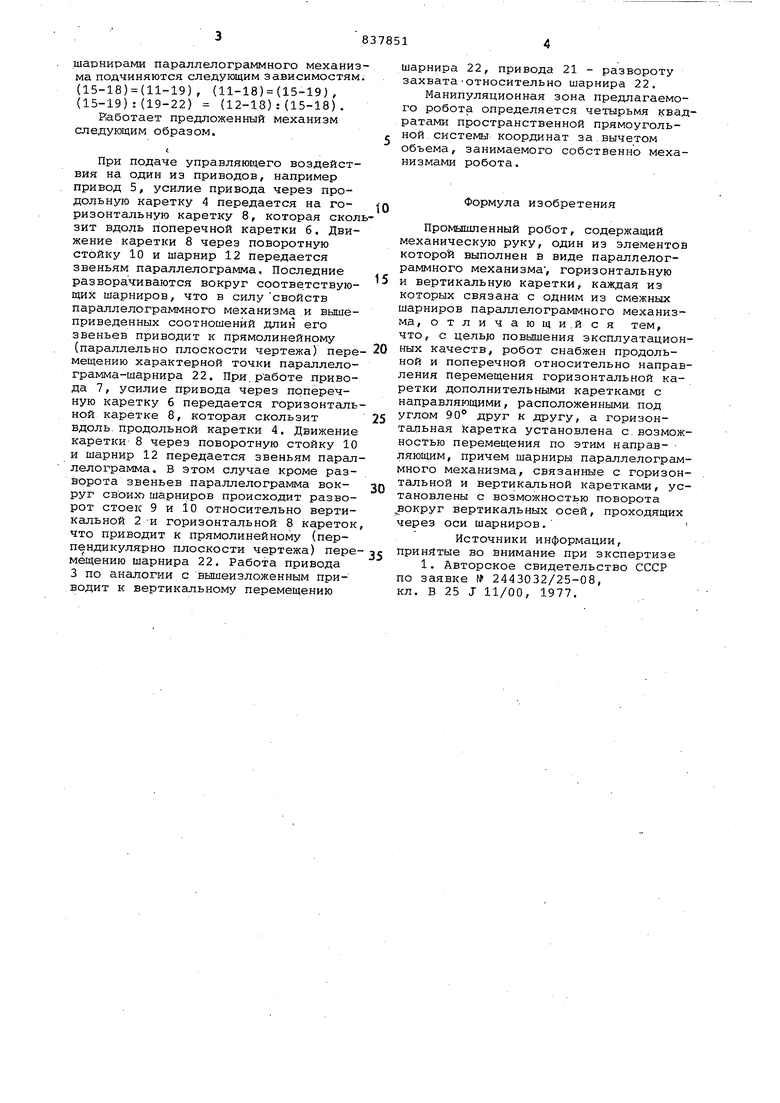
Изобретение относится к машиност роению, а именно к манипуляторам с программным или ручным управлением для механизации вспомогательных и основных технологических операций. Известен промышленный робот, сод жащий механическую руку, один из эл ментов которой выполнен в виде пара лелограммного механизма, горизонтал ную и вертикальную каретки, каждая из которых связана с одним из смежных шарниров параллелограммного механизма l-f. Недостатком этой конструкции роб та являются низкие эксплуатационные качества. Цель изобретения - повышение экс луатационных качеств. Указанная цель достигается тем, что робот снабжен продольной и поперечной относительно направления перемещения горизонтальной каретки дополнительными каретками с направляющими, расположенными под углом 90° друг к другу, а горизонтальная каретка установлена с возможностью перемещения по этим направляющим, причем шарниры параллелограммного м ханизма, связанные с горизонтальной и вертикальной каретками, установле ны с возможностью поворота вокруг вертикальных осей, проходящих через оси шарниров. На фиг. 1 дана принципиальная схема промышленного робота; на фиг. 2 вид А на фиг. 1. Промышленный робот содержит основание 1, на котором установлены вертикальная каретка 2 с приводом 3, продольная каретка 4 с приводом 5, поперечная каретка 6 с приводом 7 и горизонтальная каретка 8, имеющая возможность прямолинейного, перемещения по направляющим продольной и поперечной кареток. На вертикальной 7 и горизонтальной 8 каретках установлены поворотные стойки 9 и 10 соответственно. К стойкам 9 и 10 с помощью опорного 11 и ведущего 12 шарниров прикреплен параллелограммный механизм руки, содержащий ведущее 13 и ведомое 14 звенья, соединенные между собой шарниром 15, и два направляющих звена 16 и 17, соединенные с ведущим и ведомым звеньями параллелограммного механизма шарнирами 18 и 19 соответственно. Ведомое звено 14 несет захват 20 с приводом 21, имеющий возможность вращения относительно оси 22. При этом расстояния между шарнирами параллелограммного механиз ма подчиняются следующим зависимостям (15-18) (11-19) , {11-18) (15-19) , (15-19) ; (19-22) (12-18):(15-18) . Работает предложенный механизм следующим образом. При подаче управляющего воздействия на один из приводов, например привод 5, усилие привода через продольную каретку 4 передается на горизонтальную каретку 8, которая скол зит вдоль поперечной каретки б, Движение каретки 8 через поворотную стойку 10 и шарнир 12 передается звенья:м параллелограмма. Последние разворачиваются вокруг соответствующих шарниров, что в силу свойств параллелограммного механизма .и вышеприведенных соотношений длин его звеньев приводит к прямолинейному (параллельно плоскости чертежа) пере мещению характерной точки параллелограмма-шарнира 22. При, работе привода 7, усилие привода через поперечную каретку 6 передается горизонталь ной каретке 8, которая скользит вдоль, продольной каретки 4, Движение каретки 8 через поворотную стойку 10 и шарнир 12 передается звеньям парал лелограмма. В этом случае кроме разворота звеньев параллелограмма вокруг СВОИХ) шарниров происходит разворот стоек 9 и 10 относительно вертикальной 2-й горизонтальной 8 кареток что приводит к прямолинейному (перпендикулярно плоскости чертежа) пере мещению шарнира 22. Работа привода 3 по аналогии с вышеизложенным приводит к вертикальному перемещению шарнира 22, привода 21 - развороту захвата-относительно шарнира 22. Манипуляционная зона предлагаемого робота определяется четырьмя квадратами пространственной прямоугольной , системы координат за.вычетом объема, занимаемого собственно механизмами робота. Формула изобретения Промышленный робот, содержащий механическую руку, один из элементов которой выполнен в виде параллелограммного механизма , горизонтальную и вертикальную каретки каждая из которых связана с одним из смежных шарниров параллелограммного механизма, отличающи.йся тем, что, с цельно повышения эксплуатационных качеств, робот снабжен продольной и поперечной относительно направления перемещения горизонтальной каретки дополнительными каретками с направляющими, расположенными под углом 90° друг к другу, а горизонтальная баретка установлена с.возможностью перемещения по этим направ- ляющим, причем шарниры параллелограммного механизма, связанные с горизонтальной и вертикальной KapeTKaNm, установлены с возможностью поворота jBOKpyr вертикальных осей, проходящих через оси шарниров. Источники информации, принятые во внимание при зкспертизе 1. Авторское свидетельство СССР по заявке № 2443032/25-08, кл. В 25 J 11/00, 1977,
- 15
Г9
21
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1978 |
|
SU837852A1 |
| Промышленный робот | 1977 |
|
SU846267A1 |
| Промышленный робот | 1977 |
|
SU837850A1 |
| Манипулятор | 1980 |
|
SU1050863A1 |
| Промышленный робот | 1987 |
|
SU1407791A1 |
| РОБОТ, ВЫПОЛНЕННЫЙ С ИСПОЛЬЗОВАНИЕМ ПРИНЦИПА ПАРАЛЛЕЛОГРАММА | 2016 |
|
RU2663510C2 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2017 |
|
RU2674370C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С КРУГОВЫМ РЫЧАЖНЫМ ОСНОВАНИЕМ | 2017 |
|
RU2667236C1 |
| Промышленный робот | 1987 |
|
SU1481057A1 |