Изобретение относится к обработке материалов и может быть использовано в гибких производственных системах (ГПС) для оснащения промышленных роботов и манипуляторов.
Целью изобретения является расширение технологических возможностей:
На фиг.1 изображено захватное устройство, общий вид; на фиг.2 - то же, вид
Исходное положение губок 6 и 8, разведенное на максимальное расстояние для зажима максимального диаметра деталей - D. При подаче жидкости в нештоковую полость гидроцилиндра 2 шток переместится влево вместе с шарнирно сочлененной с ним рейкой 3 и правой губкой 8, шарнирно закрепленной на рейке 3 с помощью пальца 7. Шестерня 5, проворачиваясь по часовой стрелке, на такую же линейную величив плане; на фиг.З - сечение А-А на фиг.1; ю ну переместит вправо рейку 4, несущую на
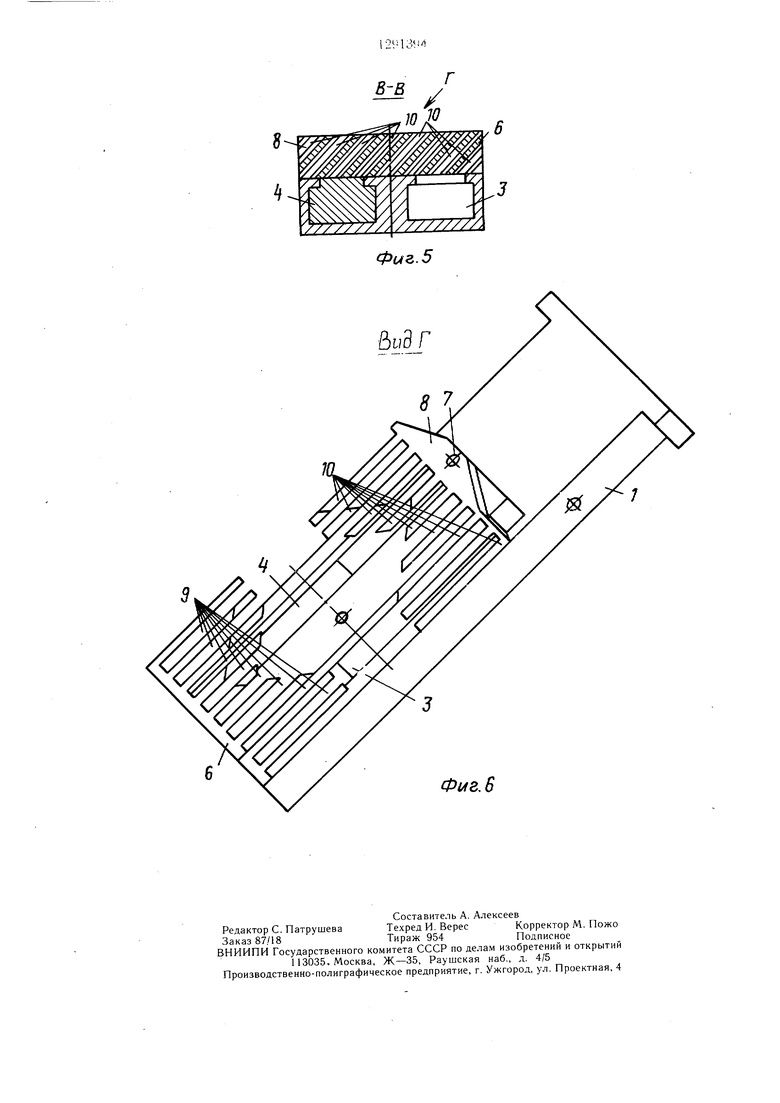
на фиг.4 - сечение Б-Б на фиг.1; на фкг.5 - сечение В-В на фиг.1; на фиг.6 - Bii:i Г на фиг.5.
Захватное устройство включает в себя несущий корпус 1, в котором расположен привод, например гидроцилиндр 2, сочлененный с рейкой 3 суммирующего механизма. Рейка 3 кинематически связана с рейкой 4 через шестерню 5, установленную в корпусе 1. На рейке 4 жестко за- креп.чена левая губка 6, а на рейке 3 шарнирно с помопгью пальца 7 - правая губка 8. Губки 6 и 8 выполнены в виде сопряженных гребенок, профили которых смещены в шахматном порядке, т. е. пазы 9 губки 6 совмещены с выступами 10 губки 8 и, наоборот, пазы губки 8 совмещены с выступами губки 6. А плоскости пазов гребенок расположены наклонно к плоскости перемещения губок.
Захватное устройство работает следующим образом.
15
20
25
себе губку 6. При встрече губок 6 и 8 они зайдут друг за друга в связи с тем, что выступы 10 губки 8 расположены напротив пазов 9 губки 6 и, наоборот, пазы губки 8 совмещены с выступами губки 6. Это позволяет зажимать минимальный диаметр D де- тали.
При зажиме деталь базируется на призмах губки 6 и прижимается встречной самоустанавливающейся губкой 8.
Формула изобретения
Захватное устройство, содержащее корпус, на котором установлены с возможностью плоскопараллельного перемещения зажимные губки с призматическими рабочими поверхностями, отличающееся тем, что, с целью расширения технологических возможностей, губки вЕлполнены в виде гребенок, выступы которых расположены наклонно к плоскости перемещения губок, при этом выступы одной гребенки имеют возможность расположения во впадинах другой.
Исходное положение губок 6 и 8, разведенное на максимальное расстояние для зажима максимального диаметра деталей - D. При подаче жидкости в нештоковую полость гидроцилиндра 2 шток переместится влево вместе с шарнирно сочлененной с ним рейкой 3 и правой губкой 8, шарнирно закрепленной на рейке 3 с помощью пальца 7. Шестерня 5, проворачиваясь по часовой стрелке, на такую же линейную величину переместит вправо рейку 4, несущую на
ну переместит вправо рейку 4, несущую на
5
0
5
себе губку 6. При встрече губок 6 и 8 они зайдут друг за друга в связи с тем, что выступы 10 губки 8 расположены напротив пазов 9 губки 6 и, наоборот, пазы губки 8 совмещены с выступами губки 6. Это позволяет зажимать минимальный диаметр D де- тали.
При зажиме деталь базируется на призмах губки 6 и прижимается встречной самоустанавливающейся губкой 8.
Формула изобретения
Захватное устройство, содержащее корпус, на котором установлены с возможностью плоскопараллельного перемещения зажимные губки с призматическими рабочими поверхностями, отличающееся тем, что, с целью расширения технологических возможностей, губки вЕлполнены в виде гребенок, выступы которых расположены наклонно к плоскости перемещения губок, при этом выступы одной гребенки имеют возможность расположения во впадинах другой.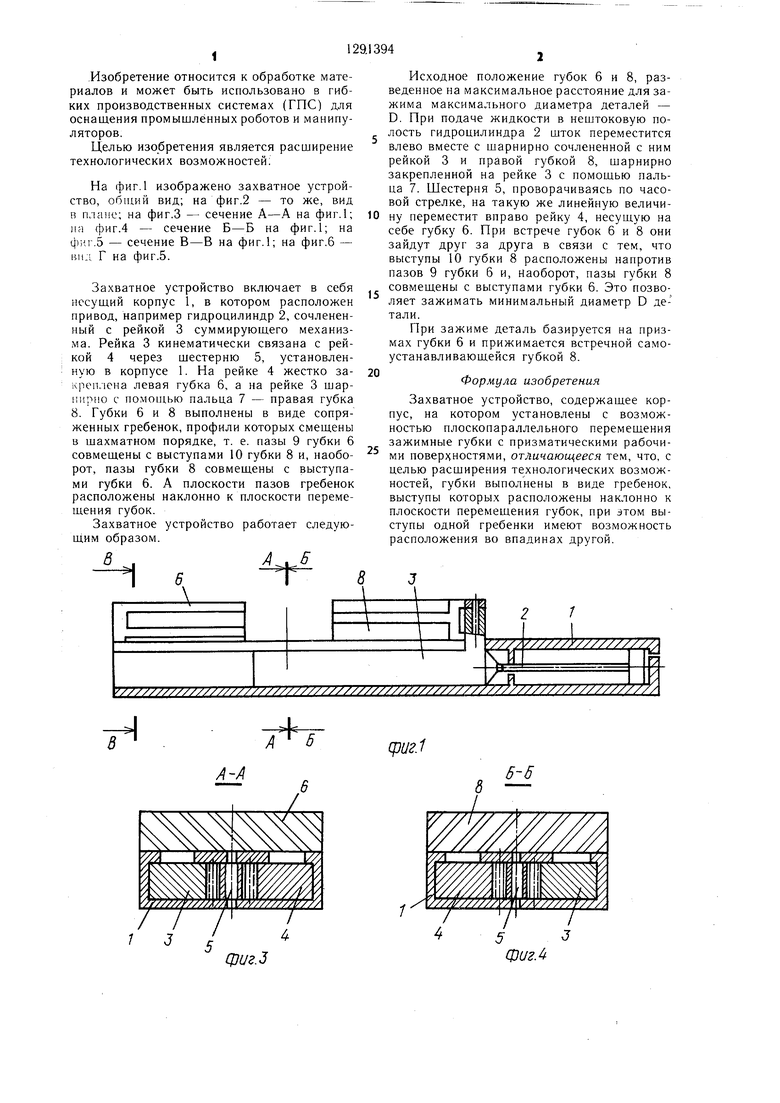
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для прижима балок | 1971 |
|
SU449869A1 |
| Станок для растяжки и формовки обмоток электрических машин из лодочки в секцию | 1989 |
|
SU1737637A1 |
| Захватное устройство | 1987 |
|
SU1444143A1 |
| Загрузочное устройство | 1985 |
|
SU1328146A1 |
| Автомат для ударно-стыковой сварки | 1971 |
|
SU442030A1 |
| МАШИНА ДЛЯ ОБВЯЗЫВАНИЯ ТЮКОВ ПОЛОСОВЫМ ЖЕЛЕЗОМ | 1930 |
|
SU38583A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
| Фиксатор для стирки обуви в стиральной машине (варианты) | 2021 |
|
RU2797026C1 |
| Устройство для изготовления замкнутых строповочных петель из мерного отрезка заготовки | 1990 |
|
SU1787618A1 |
Изобретение относится к обработке материалов и может быть использовано в гибких производственных системах для оснащения промышленных роботов и манипуляторов. Цель изобретения - расширение технологических возможностей. При подаче жидкости в нештоковую полость гидроцилиндра 2 шток переместится влево вместе с шарнирно сочлененной с ним рейкой 3 и правой губкой 8, шарнирно закрепленной на рейке 3 с помошью пальца 7. Шестерня, проворачиваясь по часовой стрелке, на такую же линейную величину переместит вправо рейку 4, несушую на себе губку 6. При встрече губок 6 и 8, так как выступы губки 8 расположены напротив пазов губки 6 и, наоборот, впадины губки 8 совмешены с выступами губки 6, выступы одной губки зайдут в пазы другой губки и наоборот. При зажиме деталь базируется на призмах губки 6 и прижимается встречно самоустанав- ливаюш,ейся губкой 8. 6 ил. (Л Is5 СО 00 со ери г. г
A-/I
фиг.З
фиг Л
В В
Фиг. 5
.В
| Схват промышленного робота | 1977 |
|
SU638462A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
