Изобретение относится к робототехнике и может быть использовано при создании гибких автоматизированных производств с универсальными или специализированными транспортными роботами и роботами-перегрузчиками, преимущественно для транспортирования, загрузки и выгрузки подвесных транспортных тележек.
Цель изобретения - расширение технологических возможностей за счет обеспечения ориентации захватываемых объектов, находящихся в подвещенном состоянии.
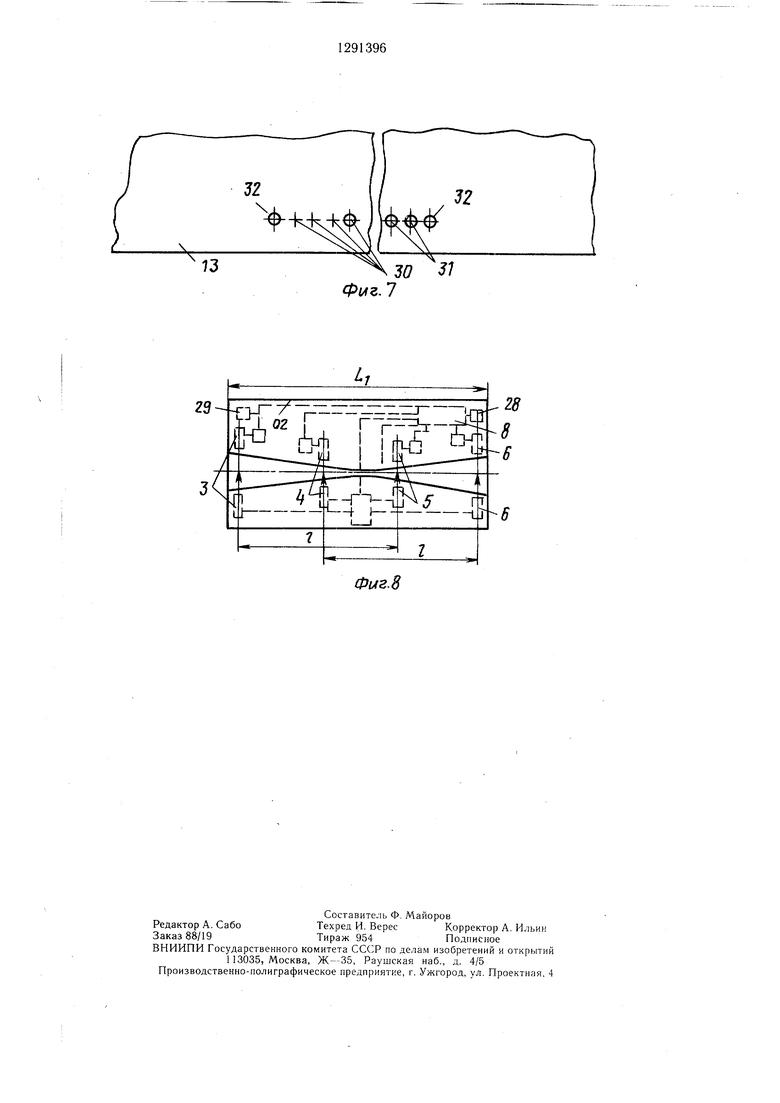
На фиг. 1 изображено электромагнитное захватное устройство, общий вид; на фиг. 2 - расположение паза и электромагнита на захватом устройстве; на фиг. 3 - электромагнит; на фиг. 4 - транспортная тележка с магнитопроводной пластиной; на фиг. 5,- схема расположения датчиков наличия объекта; на фиг. б - блок считывания кода; на фиг. 7 - кодирующее отверстие на магнитопроводной пластине; на фиг. 8 - схема расположения датчиков и блока управления.
Э. гектромагнитное захватное устройство содержит корпус 1, в котором выполнен су- | аю1цийся к центру продольный паз 2, в которо.м установлены датчики 3--6 наличия объекта манипулирования, и электромагнит 7 подпружиненный к корпусу 1, в котором также расположен блок 8 управления.
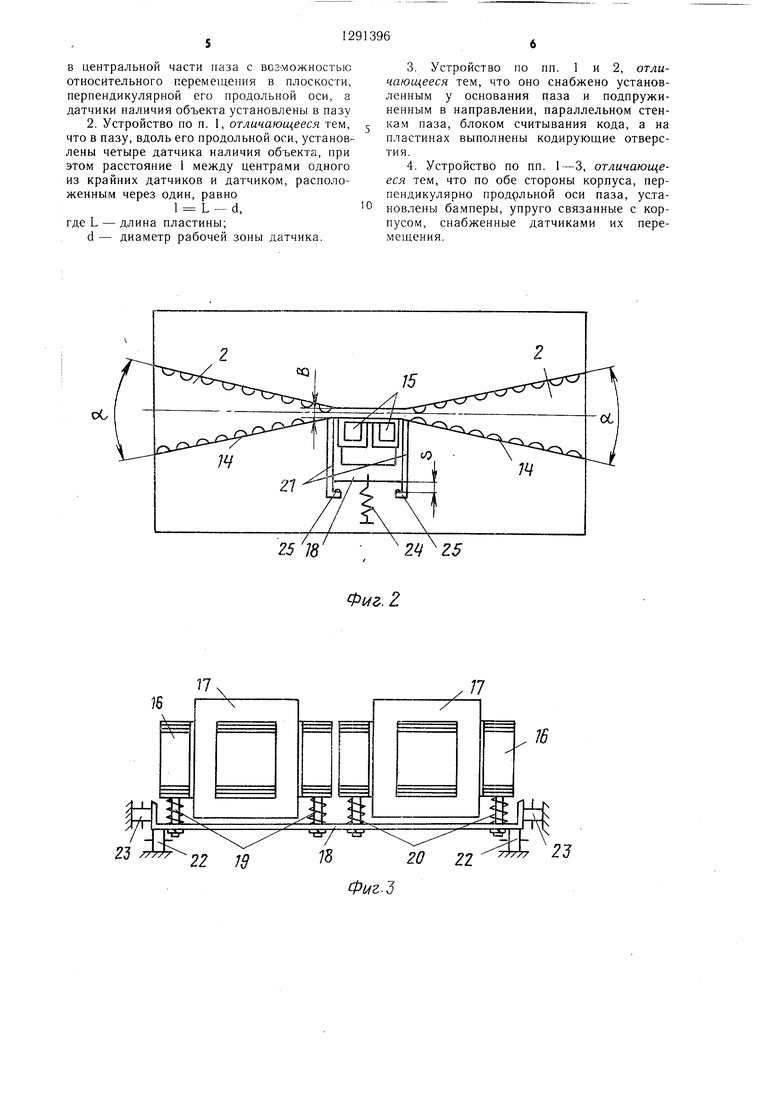
Устройство предназначено для манипулирования объектами, находящимися в подве- пенном состоянии, например, транспортной тележкой 9 с рамой 10, на которой закреплены 1птыри-паковкодержатели 11 с канавками 12. На раме 10 закреплена пластина 13 из магнитопроводного материала. Длина пластины должна быть равна или меньше длины рамы, поскольку при расположенных в ряд вплотную друг к другу тележках 9 между пластинами 13 соседних тележек 9 должен быть достаточный зазор, превыщающий рабочую область одного из датчиков 3:-6 продольного паза 2. Это необходимо для надежного различении соседних тележек и их вертикалей загрузки (т.е. вертикальных рядов штырей). Ширина пластины 13 выбирается с учетом высоты электромагнита 7 и разброса высоты нижней части рамы 10 от уровня пола.
Угол схождения паза, который является ориентирующим, зависит от коэффициента трения пластины 13 тележки о рабочую боковую поверхность паза, конструкции и технического состояния катков узла передвижения тележки 9 и т.д. BoKOBiaie поверхности паза 2 образованы телами качения, например, роликами 14. Обе боковые поверхности продольного паза 2 фактически представляют собой рабочие поверхности миниатюрного рольганга, где оси роликов установлены по выпуклым кривым и где предусмотрены карманы для установки датчиков и выдвигающегося в паз 2 при включении
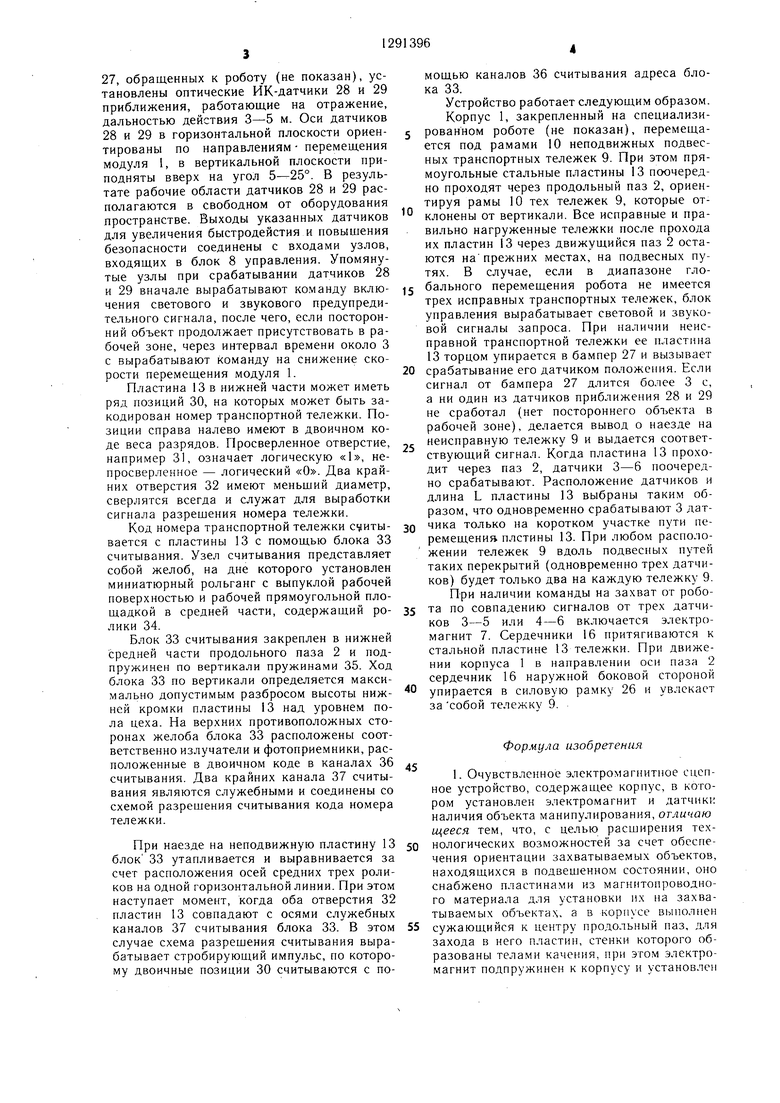
электромагнита 7, состоящего из двух частей 15, каждая из которых включает шихтованный ферромагнитный сердечник 16 и обмотки 17, установленные на подвижной
горизонтальной пластине 18 на подвижных стойках 19, на которые надеты пружины 20. Верхние концы стоек 19 закреплены на сердечниках 16, на нижних концах стоек 19, свободно вставленных в отверстия пластины 18, установлены клипсы. Подвижная пластина 18 установлена в направляющих 2 на роликах 22 и 23 к оттягивается пружиной 24 до упоров 25. Ход пластины 18 (фиг. 2) регулируется накладными упорами 25.
С противоположной стороны величина хо5 да ограничивается другими упорами (не показаны), расноложенпыми па направляющих 21. .Однако в рабоче.м положении пластина 18 пе доходит до других упоров, так как рабочая иоверхность сердечиикоз при этом прижата к пластине 13 тележки, ,чаве0 денной в паз 2. Окно в канале 2, предназначенное для прохода 5лектрома1-пита 7 обрамлено силовой рамкой 26 из стально-о уголка, восгфинимающей усилия, наирав. К н- ные вдоль паза 2 через боковые поверхности сердечника 16. Датчики 3--6 установлены таким образом, чтобь их рабочие области находились в верхней части ,оль- ного паза 2. Расстоян.ие между ос.чми датчиков 3 и 4, а также л.атчиков 5 и 6 приблизительно равно расстоянию между вертиQ калями загрузки, по которым закреплены штыри-паковкодержатели 1 тележки 9. 1Паг установки крайних 3 и 5 а также датчиков 4 и 6 идшя ; вертикали . ки при этом равен L--d, где L --- длича пластины 13, закрепленной на раме 10 траьс
портной тележки 9, Л - -- диаметр рабочей зоны одного из датикон 3- 6. При :эт;-.; .- ,-о- виях в момент перекрьггкя пластиной J3 :;л- новременно трех датчике 3- -5 мли 4---6 -:о- тикаль погрузки трйнспортной гележки 9 находится напротив рабочего органа робота
0 (не показан) при любоу ко, ;ичестр;е i снобом размещении транспорт|)х t . От.ча.ч- ка позиционирования производится едви:ч;м осей датчиков вдоль паза . и последующей проверкой погрешностей после спепки с тележкой 9 на хо.ау.
Для исключения поломок при наезде на препятствие, повышения оперативности, быстродействия и повьппе1П1я безопасности персонала, на торцах модуля 1 установлены пол,- пружиненные бамперы 27, замыкаю11и:е э..1ект0 рическую цепь при легком на иих ажа- тии. При этом перемещение робота связя - ного с ним корпуса 1 мгновенно .- п,ается.
При отпускании бампера движение возобновляется автоматически то,лько че|1ез 1,5
5 3 с.
Кроме того, для повьп1 ения безопасности персонала при перемещении устройства с большой скоростью над концами бамперов
5
27, обращенных к роботу (не показан), установлены оптические ИК-датчики 28 и 29 приближения, работающие на отражение, дальностью действия 3-5 м. Оси датчиков 28 и 29 в горизонтальной плоскости ориен- тированы по направлениям перемещения модуля 1, в вертикальной плоскости приподняты вверх на угол 5-25°. В результате рабочие области датчиков 28 и 29 располагаются в свободном от оборудования пространстве. Выходы указанных датчиков для увеличения быстродейстия и повыщения безопасности соединены с входами узлов, входящих в блок 8 управления. Упомянутые узлы при срабатывании датчиков 28 и 29 вначале вырабатывают команду вклю- чения светового и звукового предупредительного сигнала, после чего, если посторонний объект продолжает присутствовать в рабочей зоне, через интервал времени около 3 с вырабатывают команду на снижение скорости перемещения модуля 1.
Пластина 13 в нижней части может иметь ряд позиций 30, на которых может быть закодирован номер транспортной тележки. Позиции справа налево имеют в двоичном коде веса разрядов. Просверленное отверстие, например 31, означает логическую «1, непросверленное - логический «О. Два крайних отверстия 32 имеют меньщий диаметр, сверлятся всегда и служат для выработки сигнала разрещения номера тележки.
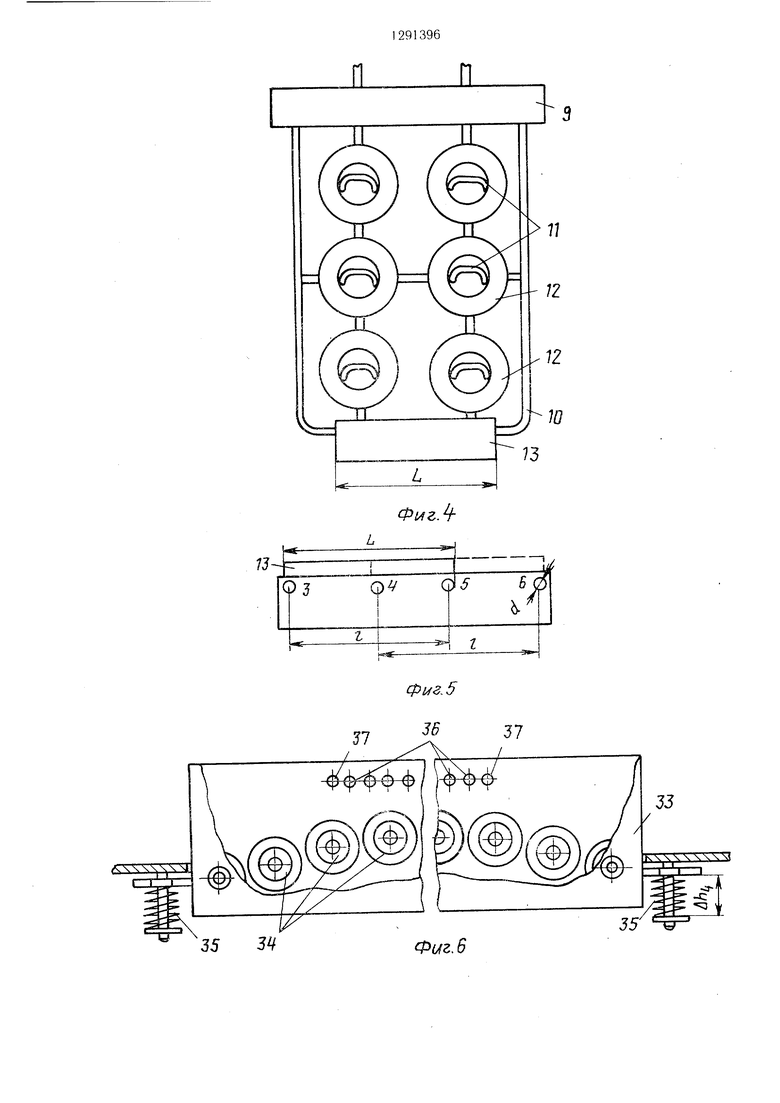
Код номера транспортной тележки вается с пластины 13 с помощью блока 33 считывания. Узел считывания представляет собой желоб, на дне которого установлен миниатюрный рольганг с выпуклой рабочей поверхностью и рабочей прямоугольной площадкой в средней части, содержащий ро- лики 34.
Блок 33 считывания закреплен в нижней средней части продольного паза 2 и подпружинен по вертикали пружинами 35. Ход блока 33 по вертикали определяется максимально допустимым разбросом высоты ниж- ней кромки пластины 13 над уровнем пола цеха. На верхних противоположных сторонах желоба блока 33 расположены соответственно излучатели и фотоприемники,расположенные в двоичном коде в каналах 36 считывания. Два крайних канала 37 считывания являются служебными и соединены со схемой разрешения считывания кода номера тележки.
При наезде на неподвижную пластину 13 блок 33 утапливается и выравнивается за счет расположения осей средних трех роликов на одной горизонтальной линии. При этом наступает момент, когда оба отверстия 32 пластин 13 совпадают с осями служебных каналов 37 считывания блока 33. В этом случае схема разрещения считывания вырабатывает стробирующий импульс, по которому двоичные позиции 30 считываются с по
мощью каналов 36 считывания адреса блока 33.
Устройство работает следующим образом.
Корпус 1, закрепленный на специализированном роботе (не показан), перемещается под рамами 10 неподвижных подвесных транспортных тележек 9. При этом прямоугольные стальные пластины 13 поочередно проходят через продольный паз 2, ориентируя рамы 10 тех тележек 9, которые отклонены от вертикали. Все исправные и правильно нагруженные тележки после прохода их пластин 13 через движущийся паз 2 остаются на прежних местах, на подвесных путях. В случае, если в диапазоне глобального перемещения робота не имеется трех исправных транспортных тележек, блок управления вырабатывает световой и звуковой сигналы запроса. При наличии неисправной транспортной тележки ее пластина 13 торцом упирается в бампер 27 и вызывает срабатывание его датчико.м положения. Если сигнал от бампера 27 длится более 3 с, а ни один из датчиков приближения 28 и 29 не сработал (нет постороннего объекта в рабочей зоне), делается вывод о наезде на неисправную тележку 9 и выдается соответствующий сигнал. Когда пластина 13 проходит через паз 2, датчики 3-6 поочередно срабатывают. Расположение датчиков и длина L пластины 13 выбраны таким образом, что одновременно срабатывают 3 датчика только на коротком участке пути перемещения, плстины 13. При любом расположении тележек 9 вдоль подвесных путей таких перекрытий (одновременно трех датчиков) будет только два на каждую тележку 9.
При наличии команды на захват от робота по совпадению сигналов от трех датчиков 3-5 или 4-6 включается электромагнит 7. Сердечники 16 притягиваются к стальной пластине 13 тележки. При движении корпуса 1 в направлении оси паза 2 сердечник 16 наружной боковой стороной упирается в силовую рамку 26 и увлекает за собой тележку 9.
Формула изобретения
. Очувствленное электромагнитпое сцепное устройство, содержащее корпус, в котором установлен электромагнит и датчики наличия объекта манипулирования, отличаю щееся тем, что, с целью расщирения технологических возможностей за счет обеспечения ориентации захватываемых объектов, находящихся в подвещенном состоянии, оно снабжено пластинами из магнитопроводно- го материала для установки их на захватываемых объектах, а в корпусе выполнен сужающийся к центру продольный паз, для захода в него пластин, стенки которого образованы телами качения, при этом электромагнит подпружинен к корпусу и установлен
в центральной части паза с воз можностыс относительного перемещения в плоскости, перпендикулярной его продольной оси, а датчики наличия объекта установлены в пазу
2. Устройство по п. 1, отличающееся тем, что в пазу, вдоль его продольной оси, установлены четыре датчика наличия объекта, при этом расстояние 1 между центрами одного из крайних датчиков и датчиком, расположенным через один, равно
1 т Н
1 JL« U,
где L - длина пластины;
d - диаметр рабочей зоны датчика.
3.Устройство по пп. 1 и 2, отличающееся тем, что оно снабжено установленным у основания паза и подпружиненным в направлении, параллельном стенкам паза, блоком считывания кода, а на пластинах выполнены кодирующие отверстия.
4.Устройство по пп. 1-3, отличающееся тем, что по обе стороны корпуса, перпендикулярно продрльной оси паза, установлены бамперы, упруго связанные с корпусом, снабженные датчиками их перемещения.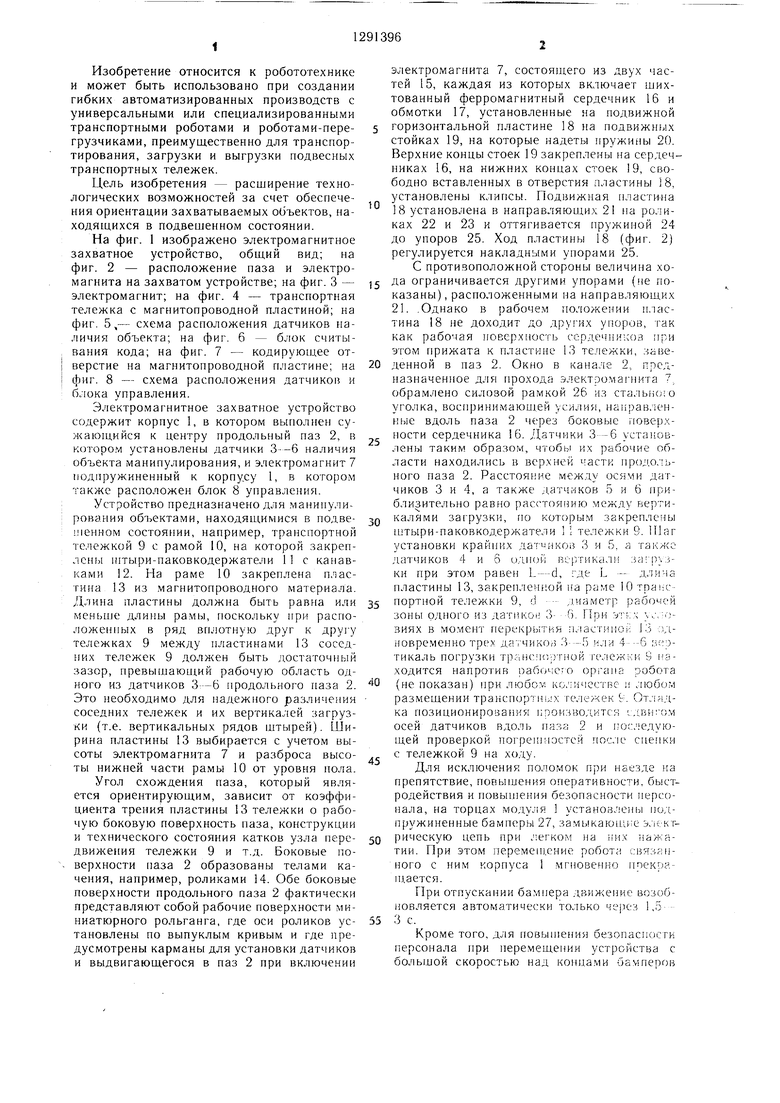
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для съема паковок на машине для формования химических волокон | 1980 |
|
SU895874A1 |
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ ТРАНСПОРТНОГО РОБОТА ПОДВЕСНОЙ МОНОРЕЛЬСОВОЙ ДОРОГИ | 1992 |
|
RU2032607C1 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРА, ХАРАКТЕРИЗУЮЩЕГО СОСТОЯНИЕ СИСТЕМЫ КОЛЕСО - РЕЛЬС, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2061610C1 |
| Устройство приема-передачи объектов манипулирования | 1988 |
|
SU1523492A1 |
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |
| УСТАНОВКА ДЛЯ ВСКРЫТИЯ И ОПОРОЖНЕНИЯ МЕТАЛЛИЧЕСКИХ БАРАБАНОВ С РЕАГЕНТОМ | 2009 |
|
RU2399566C1 |
| СИСТЕМА ЦЕНТРАЛИЗОВАННОГО УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ НАКОПЛЕНИЕМ И РАСПРЕДЕЛЕНИЕМ ПОДВЕСНЫХ СИДЕНИЙ ПОДВЕСНОГО УСТРОЙСТВА ДЛЯ ПОСАДКИ ПАССАЖИРОВ | 2019 |
|
RU2719057C1 |
| ТЕПЛИЧНАЯ АГРОСИСТЕМА | 1993 |
|
RU2050087C1 |
Изобретение относится к робототехнике и может быть использовано при создании гибких автоматизированных производств с универсальными или специализированными транспортными роботами, преимущественно для транспортирования, загрузки и выгрузки подвесных транспортных тележек. 21 Целью изобретения является расширение технологических возможностей за счет ориентации захватываемых объектов, находящихся в подвешенном состоянии. Устройство содержит корпус 1, в котором выполнен сужающийся к центру паз 2, боковые стороны которого образованы телами 14 качения, а в центральной части паза установлен подпружиненный к корпусу электромагнит 7. При перемещении корпуса 1 вместе с роботом в паз 2 заходят пластины, выполненные из магнитопроводного материала, закрепленные на тележках, находящихся в подвешенном состоянии. С помощью датчиков 3-6 происходит определение положения пластины и их фиксация электромагнитом 7. 3 з.п. ф-лы, 8 ил. 27 (О Ю со со ;о 05 Фиг.1
.2
Л
фцг.
/
/7
ю
73
7J
Фиг.
фиг. 5
Ф(Аг.В
73
Фиг. 7
f Т-Г 7 -HirjnziL-Z- -
гм:
л
LJ
-2
8 6
Фыг.в
| Манипулятор для захвата ферромагнитных деталей с ферромагнитных поверхностей | 1976 |
|
SU649566A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
