Изобретение относится к технике автоматического управления и может быть использовано в автоматизированных системах для управления линиями автооператорного типа.
Целью изобретения является расширение функциональных возможностей устройства.
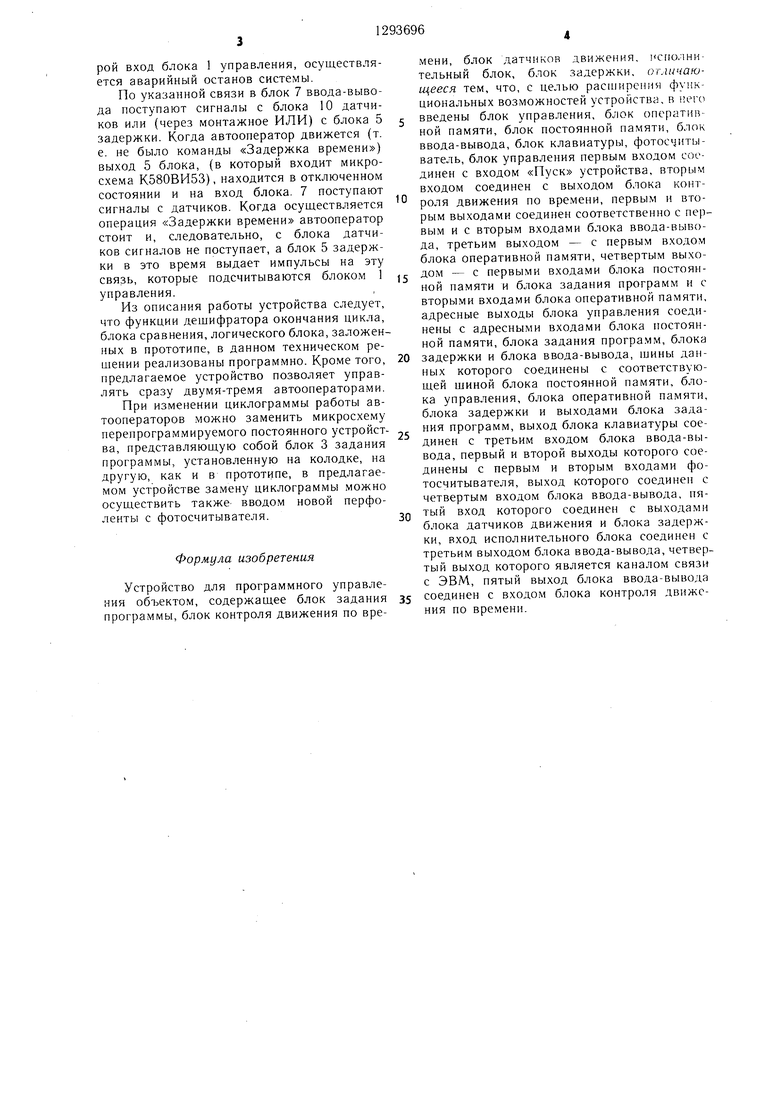
На фиг. 1 изображена структурная схема предлагаемого устройства; на фиг. 2 - обш,ий алгоритм выполнения основной программы.
Устройство содержит блок 1 управления, блок 2 постоянной памяти (ПЗУ), блок 3 задания программы, блок 4 оперативной памяти (ОЗУ), блок 5 задержки, блок 6 кла- виатуры, блок 7 ввода-вывода, фотосчитыватель 8, блок 9 контроля движения по времени, блок 10 датчиков движения , исполнительный блок 11.
Устройство работает следующим образом.
При пуске устройства блок управления, выполненный на микропроцессоре К580 и К80 выставляя на шине адреса ячеек блока постоянной памяти, по команде «Считывание памяти на своем четвертом выходе последовательно выбирает ячейки блока постоян- ной памяти, где записана основная программа работы устройства, содержащая программы-загрузчики и собственно управляющую программу.
В блоке 2 задания программы или на перфоленте содержится прикладная прог- рамма движения одного-трех автооператоров.
В начале выполнения основной программы в блок 1 управления вводится слово- состояние блока 6 клавиатуры, анализируя которое блок 1 управления выбирает вид работы: работа с блоком 3 задания прог- раммы, работа с фотосчитывателем 8, работа с внещней ЭВМ и циклическая или не циклическая работа. Канал связи с ЭВМ построен на устройстве последовательного обмена К580ИК51 и ИРПС канале. Скорость обмена информацией определяется частотой генератора передачи, частота которого синхронизирована с подобным генератором в ЭВМ. В первых двух случаях под управлением программ-загрузчиков осуществляется загрузка содержимого блока 3 задания программы или содержимого перфоленты в блок 4 оперативной памяти. Далее блок 1 управления ожидает запуска управляющей программы кнопкой «Старт на блоке 6 клавиатуры. Если эта кнопка нажата, то продолжается работа основной программы. Осу- ществляется чтение первой ячейки блока 4 оперативной памяти, т.е. первой команды прикладной программы, управляющей движением автооператоров, в которой содержится пять команд «Вперед, «Назад, «Вверх, «Вниз, «Задержка времени. Причем стар- щие четыре разряда блока 3 задания программы используются для команд, а младшие для количественной информации (на0
j
0 .
о
5 , 0 5
сколько «Вперед, «Назад, какая «Задержка).
После чтения ячейки блока 4 оперативной памяти блок 1 управления производит распознавание ко.манды «Задержка времени и, если это оказалась она, то производит запуск блока 5 задержки, если нет, то осу- пхествляется вывод команды через блок 7 ввода-вывода на исполнительный блок. В любом случае информация записывается блоком 1 управления в свои внутренние регистры.
Коды команд представляют собой следующее;
0000-- Пуста я
операция 0100-«Вперед
0001- «Вверх 1000 - «Назад 0010 - «Вниз 1 111 - «Задержка
времени
Как видно коды команд па движение выбраны таким образом, что уровень логической «1 возникает только иа из выводов, каждый из которых подключен к своему исполнительному устройству исполнительного блока.
Далее производится периодический ввод сигналов с датчиков движения и.ли из блока 5 задержки через блок 7 ввода-вывода в зависимости от адреса, выставленного блоком 1 управления, и по его команде «Чтение ввода-вывода на первом его выходе. По .мере поступления сигналов с этих блоков, блок 1 управления осуществляет декремент инфор.мации в своих внутренних регистрах. При достижении нулевого результата через блок 7 ввода-вывода производится остановка автооператора (вывод на исполнительный блок кода 0000 по команде «Запись ввода-вывода на втором Biji- ходе блока 1 управления.
После окончания цикла прикладная программа содержит «пустые команды (код 0000). Эти команды считываются и выводятся на исполнит(льный блок, как и обычные, но соответствуют отсутствию движется. Таким образом, осуществляется ожидание автооператорами с коротким циклом работы автооператора с самым длинным циклом. При наличии «пустых команд у всех автооператоров блок 1 управления, распознавая эту ситуацию, производит остапов выполнения всей программы, если вид работы был не циклический. Дальше работа продолжается повторным запуском всего устройства. Если вид работы был циклическим, то блок 1 управления возвращается к выполнению операции чтения первой ячейки блока оперативной памяти, т.е. к началу прикладной программы, и цикл повторяется снова.
Блок 9 контроля движения по времени осуществляет контроль правильности вьтол- нения программы движения по времени и в случае несоответствия выдает сигнал на второй вход блока 1 управления, осуществляется аварийный останов системы.
По указанной связи в блок 7 ввода-вывода поступают сигналы с блока 10 датчиков или (через монтажное ИЛИ) с блока 5 задержки. Когда автоонератор движется (т. е. не было команды «Задержка времени) выход 5 блока, (в который входит микросхема К580ВИ53), находится в отключенном состоянии и на вход блока. 7 поступают сигналы с датчиков. Когда осуществляется операция «Задержки времени автооператор стоит и, следовательно, с блока датчиков сигналов не поступает, а блок 5 задержки в это время выдает импульсы на эту связь, которые подсчитываются блоком 1 управления.
Из описания работы устройства следует, что функции дещифратора окончания цикла, блока сравнения, логического блока, заложенных в прототипе, в данном техническом решении реализованы программно. Кроме того, предлагаемое устройство позволяет управлять сразу двумя-тремя автооператорами.
При изменении циклограммы работы автооператоров можно заменить микросхему перепрограммируемого постоянного устройст- ва, представляющую собой блок 3 задания программы, установленную на колодке, на другую, как и в прототипе, в предлагаемом устройстве замену циклограммы можно осуществить также вводом новой перфоленты с фотосчитывателя.
Формула изобретения
Устройство для программного управления объектом, содержащее блок задания 35 программы, блок контроля движения по времени, блок датчиков движения, I cno. iHH- тельный блок, блок задержки, отличающееся тем, что, с целью расширения функ циональных возможностей устройства, в него введены блок управления, блок оперативной памяти, блок постоянной памяти, блок ввода-вывода, блок клавиатуры, фотосчитыватель, блок управления первым входом соединен с входом «Пуск устройства, вторым входом соединен с выходом блока контроля движения по времени, первым и вторым выходами соединен соответственно с первым и с вторым входами блока ввода-вывода, третьим выходом - с первым входом блока оперативной памяти, четвертым выходом - с первыми входами блока постоянной памяти и блока задания программ и с вторыми входами блока оперативной памяти, адресные выходы блока управления соединены с адресными входами блока постоянной памяти, блока задания программ, блока задержки и блока ввода-вывода, шины данных которого соединены с соответствующей шиной блока постоянной памяти, блока управления, блока оперативной памяти, блока задержки и выходами блока задания программ, выход блока клавиатуры соединен с третьим входом блока ввода-вывода, первый и второй выходы которого соединены с первым и вторым входами фотосчитывателя, выход которого соединен с четвертым входом блока ввода-вывода, пятый вход которого соединен с выходами блока датчиков движения и блока задержки, вход исполнительного блока соединен с третьим выходом блока ввода-вывода, четвертый выход которого является каналом связи с ЭВМ, пятый выход блока ввода-вывода соединен с входом блока контроля движения по времени.
CHavajto
fdSod f/TfOA uA (M af a:/77 /f6//
a 3adaHij/r
т
ДеА:/)
ё/уу/П/7. /OSf.fJCтаоб
.2
Состанитель H. Швец
Редактор Ю. СередаТехред И. ВересКорректор Я. MVCKH
Заказ 385/52Тираж 864I одпиоискВНИИПИ Государственного комитета ССС1 по ло. Ьчм ii:ioC:H iciiiiH и OTK;)miii
1 13035, Москва, Ж-35, Раушскля H;i6., л. 4;Г, Производстве11мо-11о;1игр;1фнческое предприятш , i , Уж|-ор 1л, y.i, I (гюектна:.;. 1
( , 1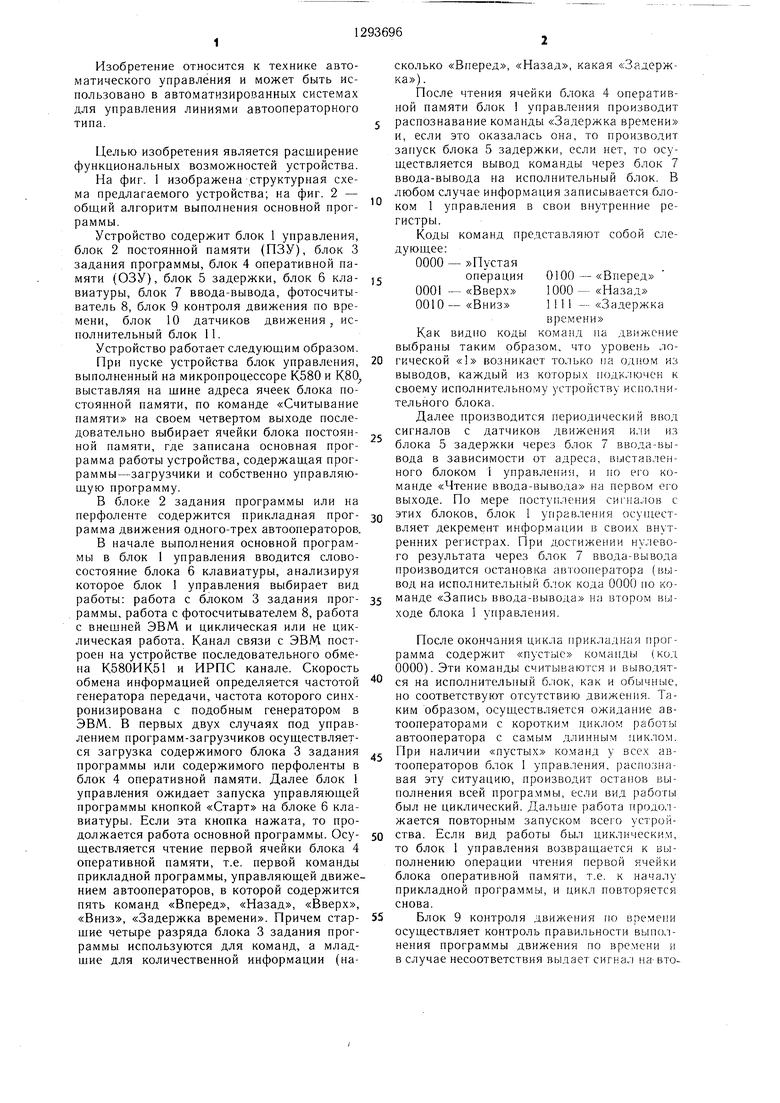
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1987 |
|
SU1476435A1 |
| Устройство для программного управления объектом | 1984 |
|
SU1208535A1 |
| Устройство для числового программного управления станками | 1975 |
|
SU732813A1 |
| Устройство контроля и управления технологическим комплексом для намотки изделий | 1989 |
|
SU1661721A1 |
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
| Устройство для программного управления станком | 1985 |
|
SU1352458A1 |
| Устройство для формирования управляющих программ | 1985 |
|
SU1257616A1 |
| Устройство для сопряжения ЭВМ с кассетным магнитофоном | 1982 |
|
SU1084777A1 |
| Устройство для записи и коррекции программ | 1982 |
|
SU1149268A1 |
| Устройство для обмена информацией | 1987 |
|
SU1497619A1 |

Изобретение относится к технике автоматического управления и может быть использовано Б автоматизированных системах для управления линиями автоонераторного типа. Цель изобретения - рас1иирение функциональных возможностей устройства, flocтавленная цель достигается тем, что в известное устройство, содержащее блок 3 задания программы, блок 9 контроля движения по времени, блок 5 задержки, исполнительный блок 1 1, блок 10 датчиков движения, введены блок 1 управления, блок 2 постоянной памяти, блок 4 оперативной памяти, блок 7 ввода-вывода, блок 6 клавиатуры, фотосчитыватель 8. Функции дешифратора окончания цикла, блока сравнения, логического блока, заложенные в прототипе, реализованы программно. Данное устройство позволяет управлять одновременно двумя-тремя автооператорами, обеспечивает замену программы работы сменой блока постоянной памяти либо вводом перфоленты с фотосчитывателя. 2 ил. ю сл N3 (Г) оо О5 со 05
| Устройство для программного управления объектом | 1978 |
|
SU678464A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления объектом | 1984 |
|
SU1208535A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
