Изобретение относится к технике автоматического управления и может быть использовано в автоматизированных системах для управления линиями автооператорного типа..
Цель устройства - повьшюние надежности и расширение технологических возможностей устройства.
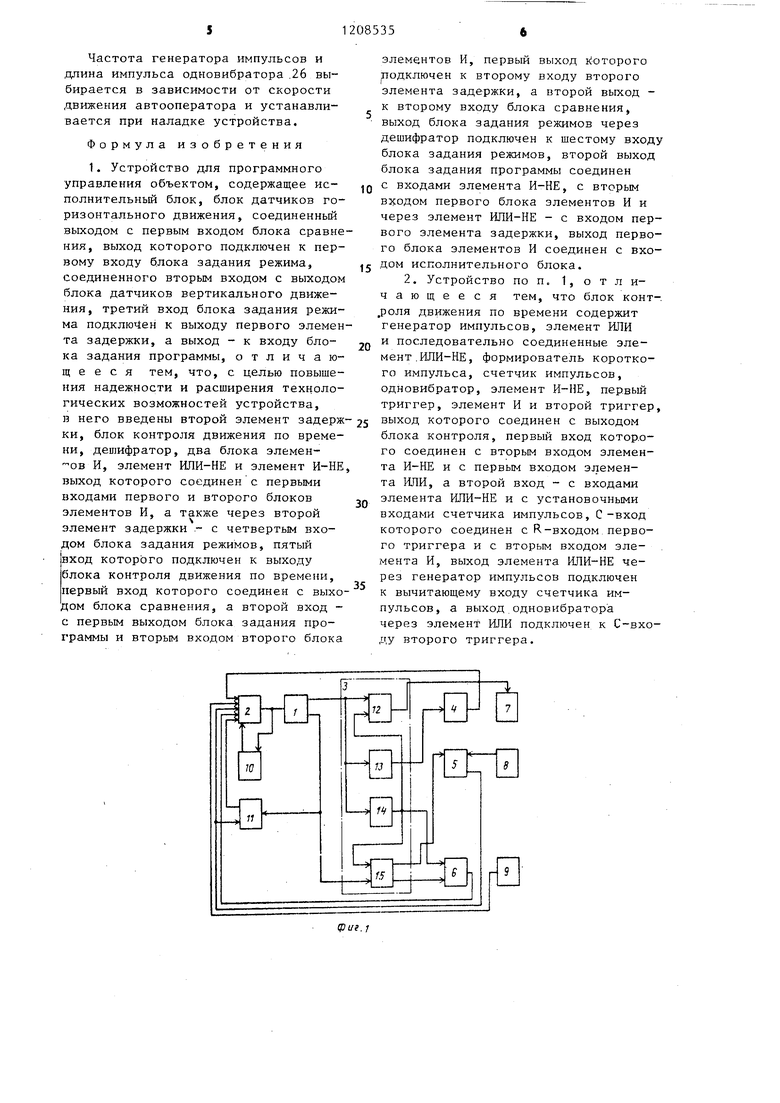
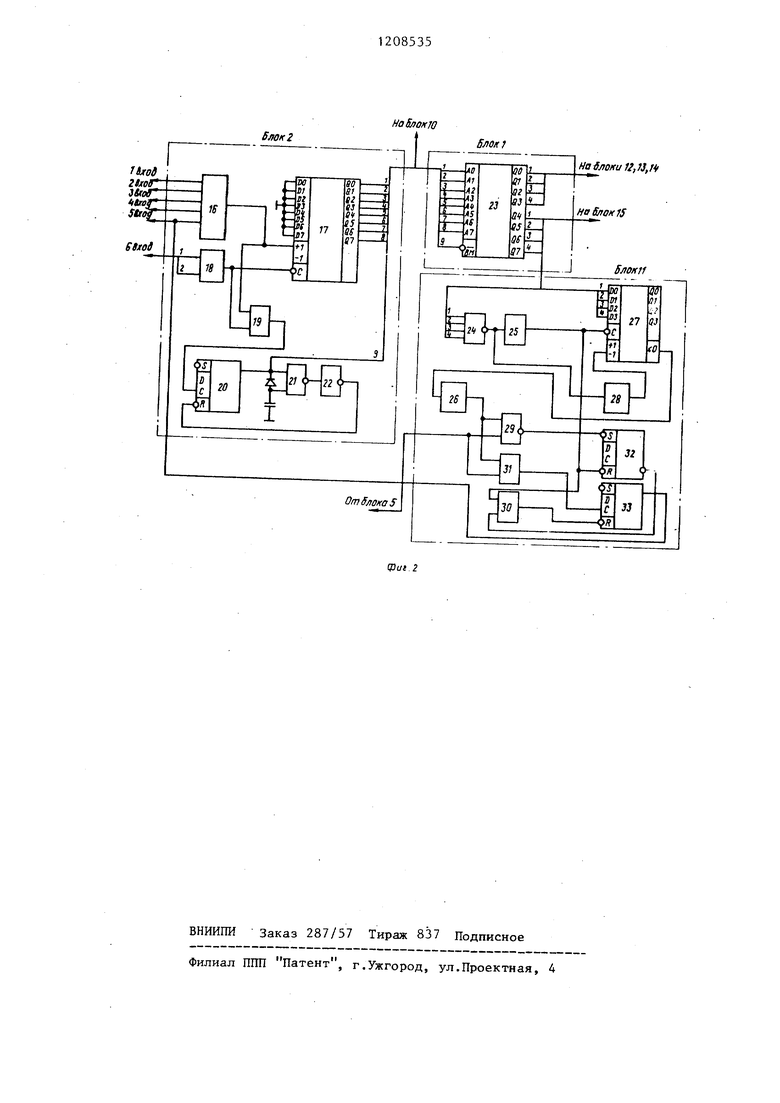
На фиг. 1 изображена структурная схема устройства; на фиг. 2 - схемы блока задания режима, блока задания программы, блока, контроля движения по времени.
Устройство содержит блок 1 задания программы, блок 2 задания режима, логический блок 3, первый элемент 4 задержки, блок 5 сравнения, второй элемент 6 задержки, исполнительный блок 7, блок 8 датчиков горизонтального движения, блок 9 датчиков вертикального движения, дешифратор 10, блок 11 контроля движения по времени, первый блок элементов И 12, элемент ИЛИ-ИЕ 13, элемент И-НЕ 14, второй блок элемен- тон И 15, элемент ИЛИ 16, счетчик 17 импульсов, элемент И 18, элемент ИЛИ 19 триггер 20, элемент И 21, элемент НЕ 22, блок 23 постоянной памяти, элемент ИЛИ-НЕ 24, формирователь 25 короткого импульса, одно- вибратор 26, счетчик 27 импульсов, генератор 28 импульсов, элемент И- НЕ 29, элемент И 30, элемент ИЛИ 31, триггеры 32 и 33.
Устройство работает следующим образом.
При пуске устройства блок 2 выставляет первую операцию, которую необходимо выполнить по циклограмме. По сигналу с блока 2 на первом выходе блока 1 задания программы, который представляет собой БИС ПЗУ, выставляется код команд Вверх, Вперед, Технологическая выдержка времени и т.д., а на втором выходе выставляется количественная информация, т.е., например, насколько вперед, какая выдержка времени. Элемент И-НЕ 14 предназначен для различия операций движения, т,е. Вверх, Вниз, Вперед, Назад и операции Технологическая выдержка времени.. Если с блока 1 снимается команда на дв1-1жение, то элемент И-НЕ 14 блокирует пpoxoж Ieниe количественной информации с второго выхода блока 1 на первый элемент 6 задержки и разрешает ее прохождение в блок 5 срав10
(5
20
25
2085352
нения, разрешает также через первый блок И 12 прохождение кодов команд движения с первого выхода блока 1 на исполнительнь1Й блок 7 и наоборот. Блок 5 сравнения записывает количественную информацию, т.е. число позиций, необходимых для перемещения, сравнивает ее с поступающей из блока 8 датчиков горизонтального движения и при совпадении вьщает команду на блок 2 задания режима для переключения на следующую операцию. Программа в блоке 1 задания программы записана таким образом, что обязательно после операций движения следует пустая операция, т.е. нулевой код, который через первьш блок эле- ментов И 12 снимает команду на движение с исполнительного блока 7 и распознается элементом ИЛИ-НЕ 13, который в свою очередь дает команду на запуск первого элемента 4 задержки. Этот блок вырабатывает выдержку времени порядка 2-5 с для исключения влияния раскачивания подвески, после чего выдает команду на блок 2 задания режима для переключения на следующую операцию. При движении подвески вверх или вниз записи количест30 венной информации в блок 5 сравнения не происходит, а переключение блока 2 задания режима на нулевую операцию производит непосредственно блок 9 датчиков вертикального движения. Если на первом выходе задания про- граммы 1 установился код команды Технологическая.выдержка времени, который представляет собой единичный код, т.е. разряд единицы, то он распознается элементом И-НЕ 14, который дает разрешение на запуск второго элемента 6 задержки, блокирует прохождение сигналов на исполнительный блок 7 и через второй блок элементов И 15 разрешает прохождение количественной информации, т.е. какая, именно вьщержка времени, во второй элемент задержки 6. После того, как второй элемент 6 задержки осуществит вьщержку времени, он дает команду на переключение блока 2 на следующую операцию. При достижении блоком 2 операции, которая является последней в цикле, срабатывает дешифратор 10 окончания цикла, которьй
переключает блок 2 задания режима на исходную операцию, причем в состав дешифратора 10 входит схема ожидания, которая блокирует сигнал
35
40
45
50
с дешифратора 10 до тех пор, пока не придут сигналы об окончании цикл с других автооператоров, что позволяет осуществить согласованную работу нескольких автооператоров. Блок контроля движения по времени осуществляет слежение за правильной отработкой движения в заданных интервалах времени и остановку линии при нарушении заданных интервалов, которая осуществляется через блокировку переключения блока 2 на следующую операцию.
Использование предложенного устройства позволяет осуществить согласованную работу нескольких автооператоров, что повышает производительность и надежность устройства за сче применения контроля по времени и блокировки движения на время выдержки при возникновении помех.
В устройстве осуществляется шесть команд: Вверх, Останов, Вниз, Вперед, Назад, Технологическая вьщержка времени.
Под коды команд в блоке 23 вьще- лены четыре младших разряда (выводы QO, Q1, Q2, Q3).
Коды команд следующие: 0000 - Останов ; 0001 - Вверх ; 0010 - 0100 - Вперед ; 1000 - Назад ; 1111 - Технологическая выдержка времени.
Как видно, коды команд на движение выбраны таким образом, что высокий уровень (уровень 1) возникает только на одном из вьгоодов блока 23. Эти же выводы через блокЭлементов И 12 подключены каждый к своему исполнительному устройству блока 7.
Использующиеся в блоке 1 микросхемы устанавливаются на разъемные колодки, что позволяет за счет перестройки микросхем быстро изменить программу функционирования при изменении технологического процесса. Вся остальная часть устройства при этом остается прежней.
Блок 11 контроля движения по времени производит контроль горизонтального движения, контроль вертикального движения осуществляют обычные аварийные выключатели.
Блок 11 работает следующим образом.
При возникновении любого кода, отличного от нулевого, на старших четырех разрядах блока 23 постоянной памяти (выводы Q4-Q7), что свидетельствует о горизонтальном движении, выход элемента ИЛИ-НЕ 24 переключается из состояния 1 в состояние О. По этому переключению на выходе формирователя 25 формируется короткий нулевой импульс и запускается генератор 28 импульсов. По импульсу записывается информация с выхода блока 23 постоянной
0 памяти (выводы Q4-Q7) в счетчик 27 импульсов через установочные входы ДО - ДЗ и производится сброс триггеров 32 и 33.
Выход генератора подключен к вы5 читающему входу счетчика 27 импульсов. При достижен1Ш счетчиком О он выдает импульс, который запускает одновибратор 26.
Если импульс с блока 5 сравнения,
0 который свидетельствует о достижении автооператором заданной позиции, приходит во время действия импульса с одновибратора 26, то элемент И- НЕ 29 формирует импульс, устанавли5 вающий инверсный выход триггера 32 в ноль. Этот импульс через элемент И 30 оказывается теперь входе триггера 33 и, следовательно, информация по С-входу этого тригге0 ра не воспринимается. Выход этого триггера, который является выходом блока 11 контроля, остается в состоянии О и не мешает прохождению сигналов через элемент И 18 блока системы программы.
Если же импульс с блока 5 сравнения не попадает на импульс с одновибратора 26, то установки инверсного выхода триггера 32 в ноль не происходит и задние фронты импульсов с блока 5 сравнения (если раньше) или с одновибратора 26 .(если позже) через элемент ИЛИ 31 устанавливают прямой выход триггера 33 по его . С-входу в состояние 1, которая через элемент И 18 блока 2 поступает на вход +1 программного счетчика. В результате последует увеличение адреса на единицу, выбор следующей
ячейки блока постоянной памяти,
в которой записана команда Останов (нулевой код). Логическая единица на входе элемента И 18, поступающая с триггера 33, заблокирует также
5 дальнейшее прохождение информации на вход 1 программного счетчика 17, тем самым произведя аварийньш останов устройства.
0
Частота генератора импульсов и .цлина импульса одновибратора .26 выбирается в зависимости от скорости движения автооператора и устанавливается при наладке устройства.
Формула изобретения
1. Устройство для программного управления объектом, содержащее исполнительный блок, блок датчиков горизонтального движения, соединенньш выходом с первым входом блока сравнния, выход которого подключен к первому входу блока задания режима, соединенного вторым входом с выходом блока датчиков вертикального движения, третий вход блока задания режима подклю 1ен к выходу первого элемента задержки, а выход - к входу блока задания программы, отличающееся тем, что, с целью повышения надежности и расширения технологических возможностей устройства, в него введены второй элемент задерж ки, блок контроля движения по времени, дешифратор, два блока элемен- 03 И, элемент ИЛИ-НЕ и элемент И-НЕ выход которого соединен с первыми входами первого и второго блоков
элементов И, а также через второй элемент задержки - с четвертым входом блока задания режимов, пятый вход которого подключен к выходу блока контроля движения по времени, первый вход которого соединен с выходом блока сравнения, а второй вход - с первым выходом блока задания программы и вторым входом второго блока
10
15
25
20
0
5
элементов И, первый выход Которого родключен к второму входу второго элемента задержки, а второй выход - к второму входу блока сравнения, выход блока задания режимов через дешифратор подключен к шестому входу блока задания режимов, второй выход блока задания программы соединен с входами элемента И-НЕ, с вторым входом первого блока элементов И и через элемент ИЛИ-НЕ - с входом первого элемента задержки, выход первого блока элементов И соединен с входом исполнительного блока.
2. Устройство по п, 1, о т л и- чающееся тем, что блок конт- ,роля движения по времени содержит генератор импульсов, элемент ИЛИ и последовательно соединенные элемент.ИЛИ-НЕ, формирователь короткого импульса, счетчик импульсов, одновибратор, элемент И-ИЕ, первый триггер, элемент И и второй триггер, выход которого соединен с выходом блока контроля, первый вход котор.о- го соединен с вторым входом элемента И-НЕ и с первым входом элемента ИЛИ, а второй вход - с входами элемента ИЛИ-НЕ и с установочными входами счетчика импульсов, С-вход которого соединен с R-входом.первого триггера и с вторым входом элемента И, выход элемента ИЛИ-НЕ через генератор импульсов подключен к вычитающему входу счетчика импульсов, а выход одновибратора через элемент ИЛИ подключен к С-вхо- ду второго триггера.
наВдокю
Б док 2
rtxod
3itoff
titioj
StioT
eixod
SMxf
HafjtOKu12,J3,} f
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1173393A1 |
| Устройство для программного управления | 1987 |
|
SU1476435A1 |
| Устройство для программного управления объектом | 1985 |
|
SU1293696A1 |
| Устройство для управления автооператорами гальванических линий | 1986 |
|
SU1327061A1 |
| Устройство для управления автоматическими линиями | 1983 |
|
SU1149223A1 |
| Устройство для управления автооператорами гальванических линий | 1979 |
|
SU877474A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1981 |
|
SU1003023A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для программного управления | 1981 |
|
SU1029145A1 |
| Устройство для отладки и контроля хода программ | 1989 |
|
SU1691843A2 |
Изобретение относится к технике автоматического управления и может быть использовано в автоматизированных системах .для управления линиями автооператорного типа. Цель изобретения - повьшение надежности и расширение технологических возможностей устройства. Устройство для программного управления объектом содержит блок задания программы, блок задания режима, логический блок, два элемента задержки, блок сравнения, ис- полнительный блок, блок датчиков вертикального и горизонтального движения, дешифратор, блок контроля движения по времени, два блока элементов И, элемент ИЛИ-НЕ и И-НЕ. Использование данного устройства позволяет осуществить согласованную работу нескольких автооператоров, что повьшает производительность и надежность устройства за счет применения контроля по времени и блокировки движения на время выдержки при возникнд- вении помех. 1 з,п. ф-лы. 2 ил. I (Л 00 СП СА СП
| Устройство для управления автоматическими линиями | 1978 |
|
SU750440A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Устройство для программного управления объектом | 1978 |
|
SU678464A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
