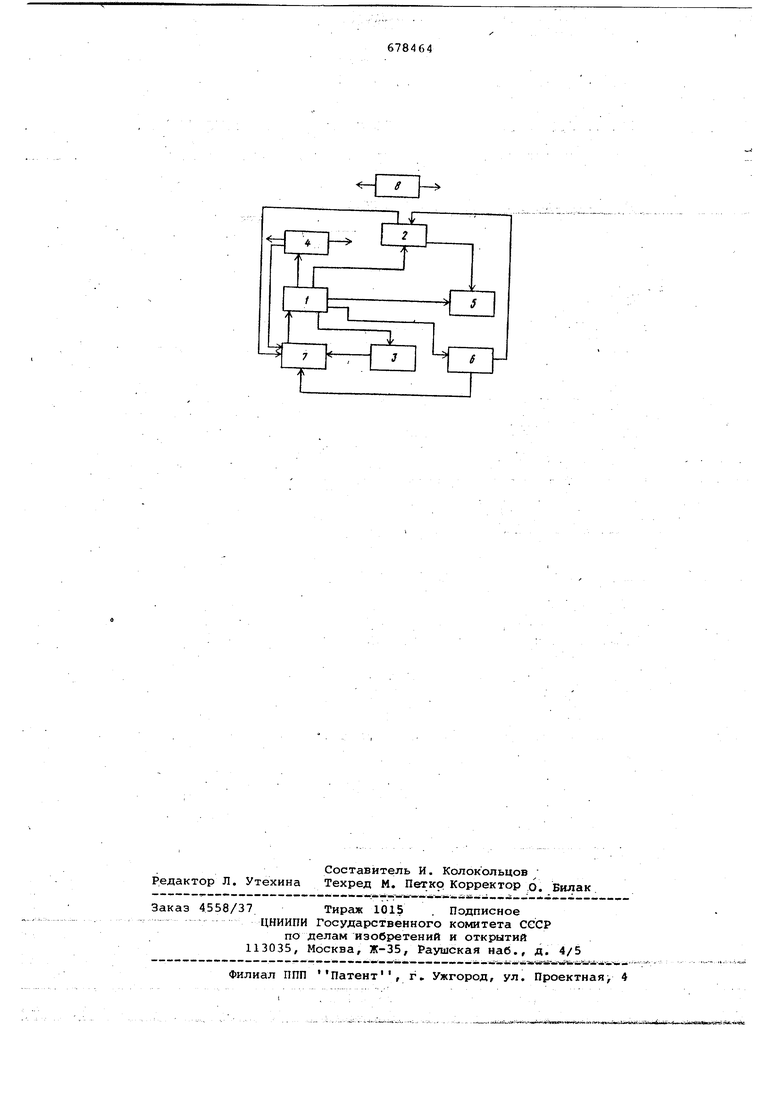
Изобретение относится к технике автоматического управления и может быть использовано в линиях нанесения металлических покрытий на изделия автомобильной промышленности. Известно устройство для программного управления, содержащее последовательно соединенные блок задания програлвлы, блок памяти, подключенный к блоку контроля, блок сравнения и блок управления, подключенный к вы ходу логического блока и к объектньм датчикам 1 . Наиболее близким техническим решением к изобретению является устройство для программного управления объектом, содержащее блок программ, подключенный к блоку синхронизации и блоку сравнения, блок задержки, блок смены программы и исполнительны блоки. Один выход блока задержки подключен через, блок смены программы к блоку программ, другой - исполнительному блоку вертикального движения, один вход - к блоку программ а другой - к выхЬду исполнительного блока горизонтального движения.Один вход блока горизонтального движения подключен к блоку вертикального движения, другой, совместно со входом бл ка вертикального движения - к блоку синхронизации {2. Устройство для прогргиимного управления обеспе.чивает следующую пос ледоват льность операций технологического процесса: вертикальное перемещение траверсы автооператора, горизонтальное движение автооператора на запрогрги1В«ироваиную рабочую позицию и технапогическую выдержку времени на рабочей позиции. Недостатком такого устройства является то, что в нем осуществлена жесткая- связь этих операций. Для расширения возможностей требуется, применение дополнительных схем (элементов ИЛИ-НЕ). Кроме того, локальные связи блока синхронизации с бло- ками горизонтального и вертикального пере лавений усложняют схему и снижают ее надежность. Целью изобретения является расширение области применения устройств ва за счет расширения функциональньк возможностей и повышения надежности устройства. Поставленна1Я цель достигается тем, что в устройстве для программного упргшления объектом, содержащем блок вертикальных перемещений и послёдовательно соединенные блок программы, бЛокзалёр:жки и блок смены пpoгpa лмы, выход которого подключен ко входу блока задания программы, соединенного вторым выходом со входом блока синхронизации, третьим выходом - через блок сравнения с первым входом блока горизонтальных перемещений, четвертый выход блока задания программы соединен со вторым входом блока горизонтальных перемещений, а пятый со входом блока вертикальных перемещений, подключенного первым выходом ко BTQрому входу блока смены программы,а вторым выходом - ко второму входу бл касравнёния,второй выход которого и выход блока синхронизации подсоедине ны сЬответственно к третьему и чётве тому входам блока cMeHfcj програШы. На чертеже дана структурная схема устройства. Оно содержит блок задания програм мы 1, блЬк сравнения 2, блок задержки синхронизации 4, блоки горизйнтальных 5 и вертикальных б перемещений, блок смены программы 7 и блок питания 8. .:s...--..vsi.Lw«a dfe;ife..fer-i, , стрЪЙство работает слёду1ощйм образом. . При подаче питания в устройство из блока 8 питание поступает в блок 7,сигнал с выхода которого подается в блок 1. При этом в соответствии с первой операцией циклограммы вблок вертикальных перемещений б поступает сигнал. Начинается подъем объекта автооператора, что контролируется .блоком б и по окончании пбД теШа распределитель блока 7 переклта ется на Цепь второй бперацййГ Адрес заданной позиции и задача движения вперед задаются в соответствий с операцией циклограм1 1ы. Эти сигналы посту-пают в блок горизонтальных перемещений 5и блок сравнения 2. При н аезде авто6пёрато ра на заданный адрес срабатавает ко вечный выключатель. Через некоторое время, определяемое элементом задерж ки блока сравнения 2, вырабатываютс сигналы останова автооператора, которыё подаются на .блок горизонтальн перемещений 5 и на блок 7, распреде литель к6торого переключается на то тью операцию.. Соответствующий сигна через блок 1 поступает в блоки 4 и 3. По истечении технологической выержки времени блок 3 вырабатывает сигнал, поступающий в блок 7. Одновременно в этот блок поступает сигнал из блока синхронизации 4. При этом ра1спределительблока 7 переключается на выполнение следующей операции. Таким образом распределитель блока 7 работает при любой временной циклограмме, определяющей технологический режим линии нанесения покрытий, причем распределитель переключается на следующее поле только после поступления сигнала совпадения всех синхронизации параллельно работающих устройств с блока 4. Применение устройства позволяет реализовать управление приводами во всевозможных йЬчетанйях, а также подкДючаоЬ Дополнйтельйьге привода линии покрытий с;ЦёлЁЮих синхронной работы с програм ньгг устррй ством. Формула изобретения Устройство для программного управления oBbgfttbM, сбдержа1дее блс1К вер ШалБШх перёмёщений и послёдовательно соединенные блок задания программы, блок задержки и блок смены программы, выход которогЬ подключен ко входу блока задания программы, соединенного вторым выходом со входом блока синхронизации третьим выходом через блок ср авнения с первым входом блока горизонтальных перемещений, о т л и 1 а ю щ е ё:с я тем, что, с целью расширения области применения устройства, четвертый :в:ыХ6Д блока задания программы соединён со вторым вхбдом блока горизонтальных перемещений,а пяти выход - ссГ входом блока вертйкальньк перемещений,подключенного первым выходом ко второму входу блока смены программы, а вторым ВЫХОДОМ - Ко второму входу блока сравнения,второй выход которого и выход блока синхронизации подсоединены соответственно к третьему и четвертому вхоДам блока смены программы. Источники информации, принятые во внимание при экспертизе 1.Автбрское свидетельство СССР 253660, .кл. В 65 G 43/08, 1968. 2.Авторское свидетельство СССР 331368, кл. G 05 В 19/04, 1970..
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный регулятор | 1979 |
|
SU873207A1 |
| Устройство для управления автоматическими линиями | 1977 |
|
SU744472A1 |
| УСТРОЙСТВО ПРОГРАМЛ1НОГО УПРАВЛЕНИЯHEiiniiCiMi-8" ПАТЕНТНО • -.^ ,<-^-тЕ^^дачигп;.:; I^ИБЛ^ОТЕКД ; | 1972 |
|
SU331368A1 |
| Устройство для управления автоматическими линиями обработки деталей | 1983 |
|
SU1135820A1 |
| Устройство для управления автома-ТичЕСКиМи лиНияМи | 1979 |
|
SU840804A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1981 |
|
SU1003023A1 |
| Устройство для программного управления объектом | 1984 |
|
SU1208535A1 |
| Устройство для программного управления автооператором гальванической линии | 1976 |
|
SU636585A1 |
| Устройство для программного управления объектом | 1985 |
|
SU1293696A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |