Изобретение относится к станкостроению и может найти применение в много опер анионных станках тип а Обра- ,батывающий центр для комплексной обработки деталей.
Цель изобретения - уменьшение габаритов за счет совмещения функций элементов конструкции.
На сриг. 1 изображен манипулятор,
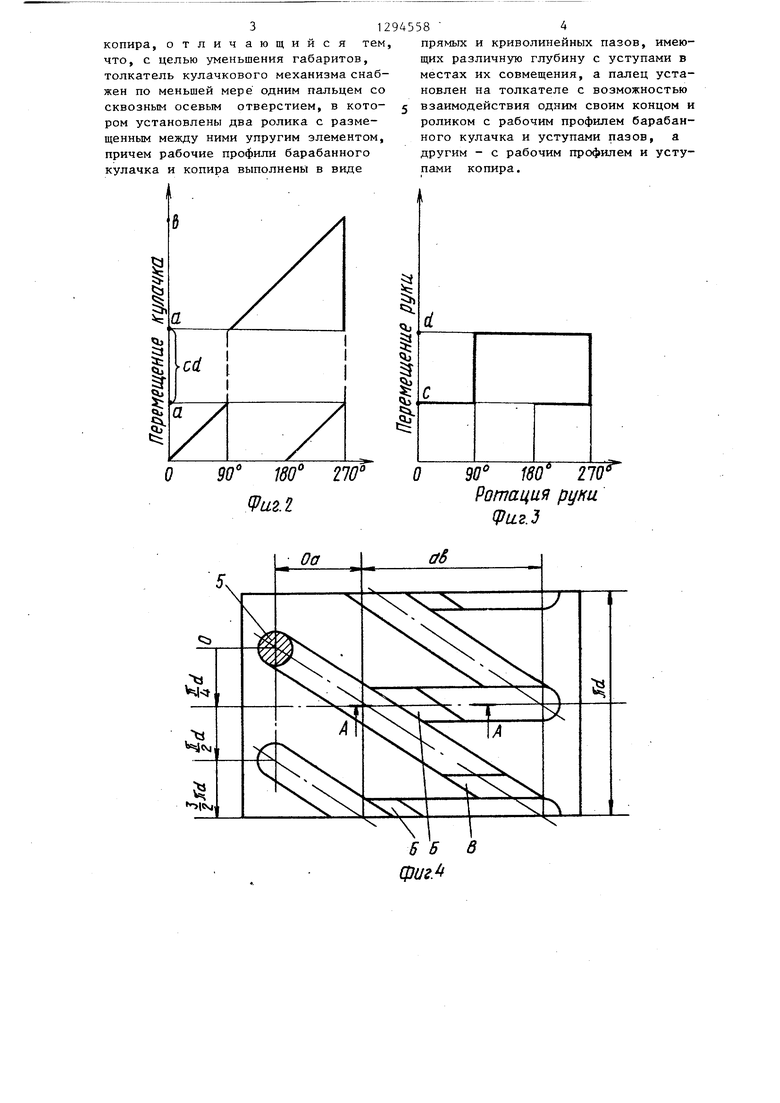
разрез; на фиг. 2 - траектории движе-(О мента, так как палец 5 в это время ния роликов по профилям копира; на фиг. 3 - траектория движения ролика по профилю барабанного кулачка; на фиг. 4 - развертка барабанного кулачследит по наклонному участку за про филем кулачка 3 и за профилем копи
(|D-|TD).
ра 4 на участке (v D - yTD). При
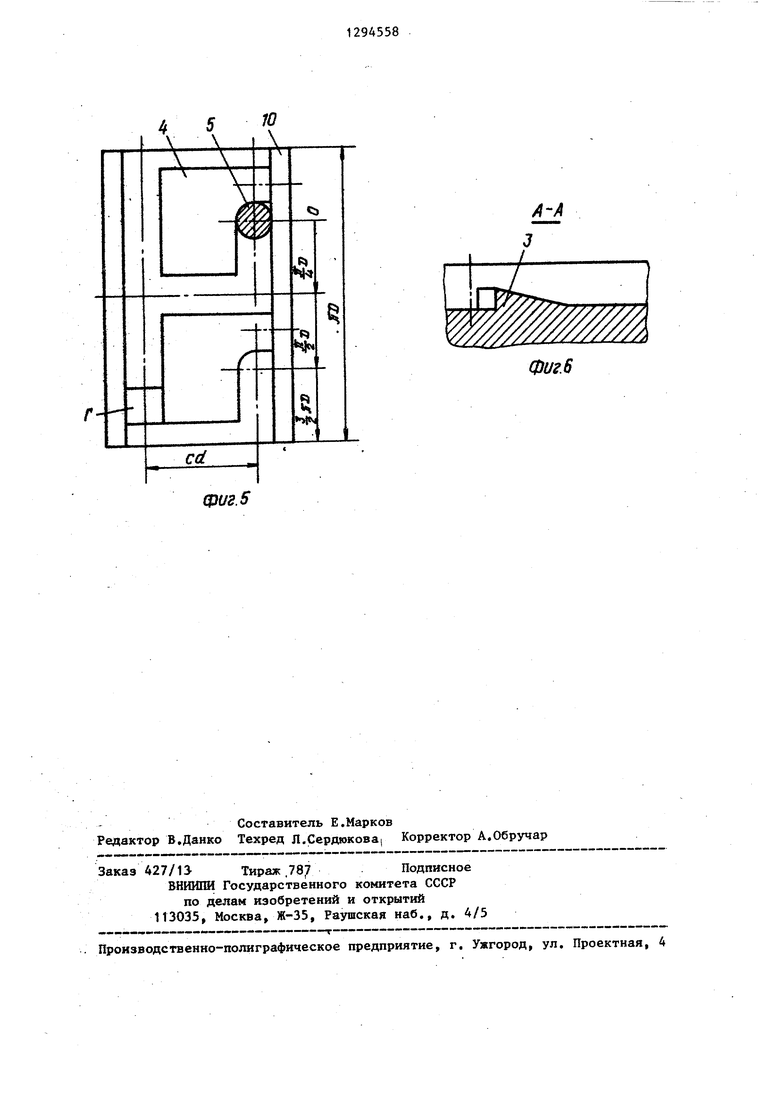
ка; на фиг. 5 - развертка копира , на фиг. 6 - разрез А-А на фиг. 4.
Манипулятор содержит толкатель 1 с рычагом 2 для захвата и автомати- ческог смены инструмента многооперационного станка. Толкатель 1 взаимодействует с барабанным кулачком 3 и копиром 4 при помощи пустотелых пальцев 5 (по крайней мере одного). Барабанный кулачок 3 имеет замкнутый профиль и при помощи штока 6 связан с приводом, а копир 4 установлен жестко в станине станка. В пальцах 5 вмонтированы ролики 7 и 8, между которыми имеется упругий элемент 9.
5 этом на конечных участках профилей кулачка 3 и копира 4 ролики 7 и 8 взаимодействуют с уступами В и Г соответственно со стороны их плавного подъема. Упругий элемент 9 при этом деформируется и позволяет роликам 7 и 8 осевое перемещение, тем самым давая возможность дальнейшему слеже нию пальцев 5.
Затем кулачку 3 сообщается обратный ход. При перемещении кулачка 3 на расстояние аЬ и cd происходит втя гйвание рычага 2 и установка замене ного инструмента в шпиндель станка и магазин, так как палец 5 следит на
20
25
Упругий элемент 9 служит для прео- прямом участке аЬ профиля кулачка 3
35
доления препятствий уступов (фиг.4, 5 - Б, В и Г) роликами 7 и 8 на профилях кулачка 3 и копира 4, необходимых для надежного слежения пальцев 5 по заданным траекториям (фиг. 2). К торцу копира 4 крепится ограничительное кольцо 10.
Работа манипулятора заключается в следующем.
От привода (пневмогидравлического, электромеханического и т.п.) барабанному кулачку 3 сообщается возвратно- поступательное перемещение только в осевом направлении. Прямой ход кулачка 3 - расстояния Оа, cd, ab и об- ратньдй ход - те же расстояния аЬ, . cd, Оа.
При перемещении кулачка 3 на рас- стояние Оа происходит ротация рычага 2 на 90 и захват инструмента в шпин- -50 деле и магазине, так как палец 5 в это время следит по наклонному участку за профилем кулачка 3 и за профи 5
(0 -| D),
лем копира 4 на участке
При дальнейшем перемещении кулачка 3 на расстояние cd происходит вьщвиже- ние рычага 2 на это расстояние и из-1294558 2
влечение инструмента из шпинделя и
, так как уступы Б-кулачка 3
магазина,
воздействуют на палец 5, а профиль копира 4 позволяет ему только осезое перемещение, поэтому слежения за профилем кулачка 3 в это время не происходит. При перемещении кулачка 3 на расстояние аЬ происходит ротация ры-я чага 2 на угол 180 и смена инструмента, так как палец 5 в это время
следит по наклонному участку за профилем кулачка 3 и за профилем копимента, так как палец 5 в это время
(|D-|TD).
ра 4 на участке (v D - yTD). При
этом на конечных участках профилей кулачка 3 и копира 4 ролики 7 и 8 взаимодействуют с уступами В и Г соответственно со стороны их плавного подъема. Упругий элемент 9 при этом деформируется и позволяет роликам 7 и 8 осевое перемещение, тем самым давая возможность дальнейшему слежению пальцев 5.
Затем кулачку 3 сообщается обрат ный ход. При перемещении кулачка 3 на расстояние аЬ и cd происходит гйвание рычага 2 и установка замененного инструмента в шпиндель станка и магазин, так как палец 5 следит на
прямом участке аЬ профиля кулачка 3
и участке cd профиля копира, 4. Ролик 8 в это время блокирует слежение пальцев 5 по копиру 4 на участО/X,
ке (y h D Т случае, если первым заканчивает слежение палец 5 по профилю кулачка 3, а ролик 7 преодолевает уступ В со стороны плавного подъема на профиле кулачка 3. Далее кулачок 3 перемещается на расстояние аО, происходит ротация рычага 2 на (-90 ) и возврат его в исходное положение, так как палец 5 следит за профилем кулачка 3 и за профилем ко- пира 4 на участке. На этом цикл смены инструменты закончен.
-50
Формула изобретения
Манипулятор для автоматической смены инструмента, содержащий рычаг держателя инструмента и привод его перемещений, включающий в себя кулачковый механизм с копиром, барабанным кулачком и закрепленным на рычаге толкателем с роликами, предназначенными для взаимодействия с рабочими профилями барабанного кулачка и
55
копира, отличающийся тем, что, с целью уменьшения габаритов, толкатель кулачкового механизма снабжен по меньшей мере одним пальцем со сквозным осевым отверстием, в котором установлены два ролика с размещенным между ними упругим элементом, причем рабочие профили барабанного кулачка и копира выполнены в виде
прямых и криволинейных пазов, имеющих различную глубину с уступами в местах их совмещения, а палец установлен на толкателе с возможностью взаимодействия одним своим концом и роликом с рабочим профилем барабанного кулачка и уступами пазов, а другим - с рабочим профилем и уступами копира.
О 90 т
(Ригг
2W
о
во° т iW
Ротация руки (Риг.з
Фи.6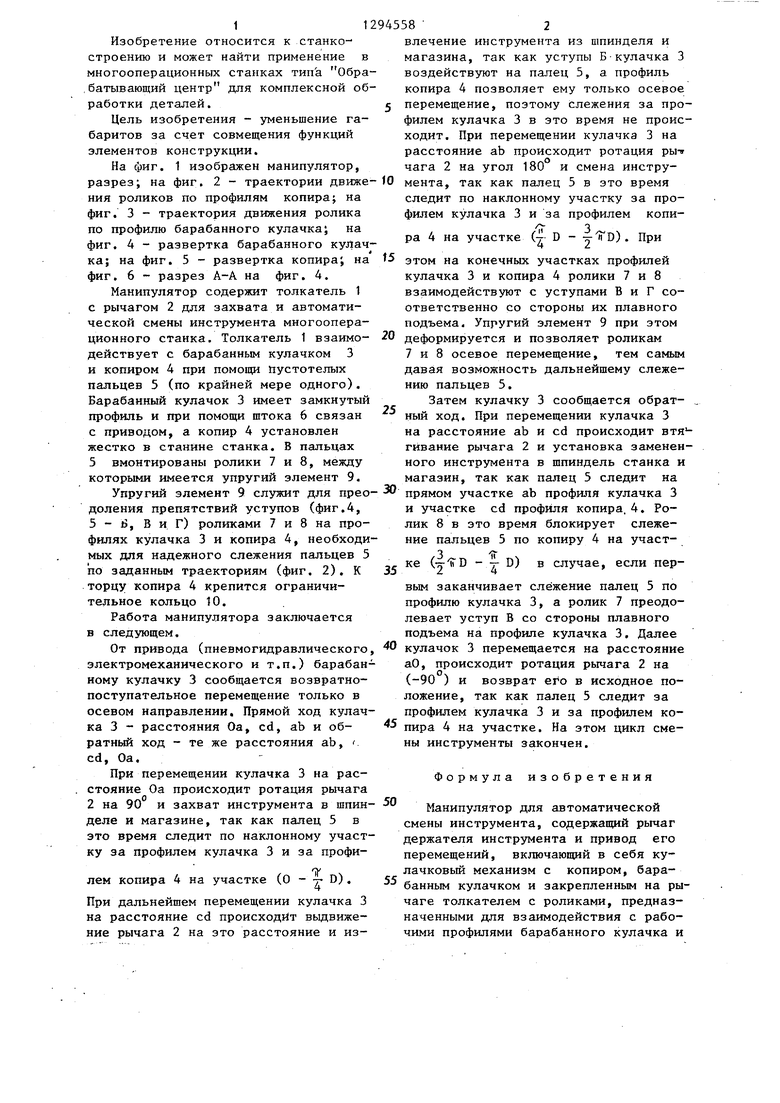
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для автоматической смены инструмента | 1986 |
|
SU1404247A2 |
| Устройство автоматической смены инструмента | 1987 |
|
SU1425032A1 |
| Устройство для автоматической смены инструмента | 1986 |
|
SU1421483A1 |
| Манипулятор для автоматической смены инструментов | 1986 |
|
SU1393578A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| Многошпиндельный гравировальный копировально-фрезерный станок | 1953 |
|
SU116956A2 |
| Устройство для автоматической смены инструмента | 1977 |
|
SU622626A1 |
| Товарный регулятор ткацкого станка | 1982 |
|
SU1101484A1 |
| ПРИВОД МАНИПУЛЯТОРА | 1992 |
|
RU2024387C1 |
| Устройство для обработки протягиванием деталей типа втулки на горизонтально-протяжном станке | 1983 |
|
SU1135568A1 |
Изобретение относится к области станкостроения и может найти приме- - некие в многооперационных станках. Цель изобретения - уменьшение габаритов за счет совмещения функций элементов конструкции. Для этого б манипуляторе с рычагом 2 смены инструмента толкатель 1 взаимодействует с кулачком 3 и копиром 4 при помощи пустотелых пальцев 5, 6, в которые вмонтированы подпружиненные ролики 7, 8. Рабочий профиль кулачка 3 выполнен в виде прямых и криволинейных пазов с уступами в местах их совмещения, бил.. сл fpas.1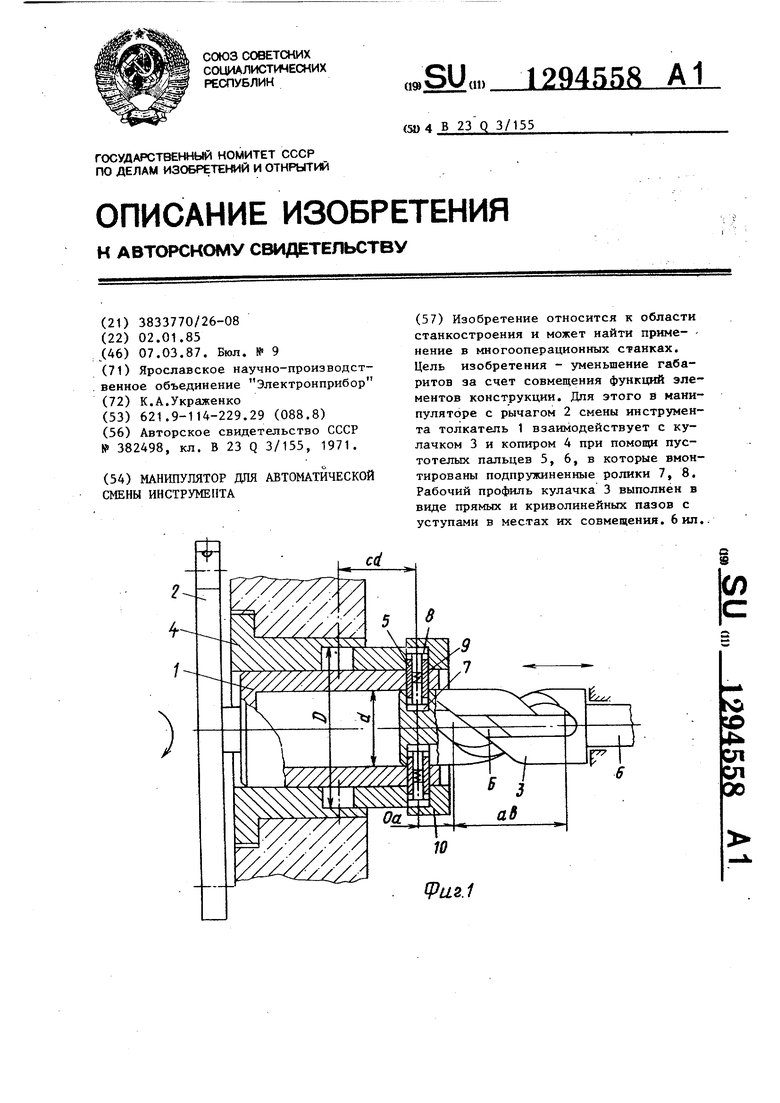
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТА МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 0 |
|
SU382498A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
