Риг f
н
А/
с
ел
со со ел
00
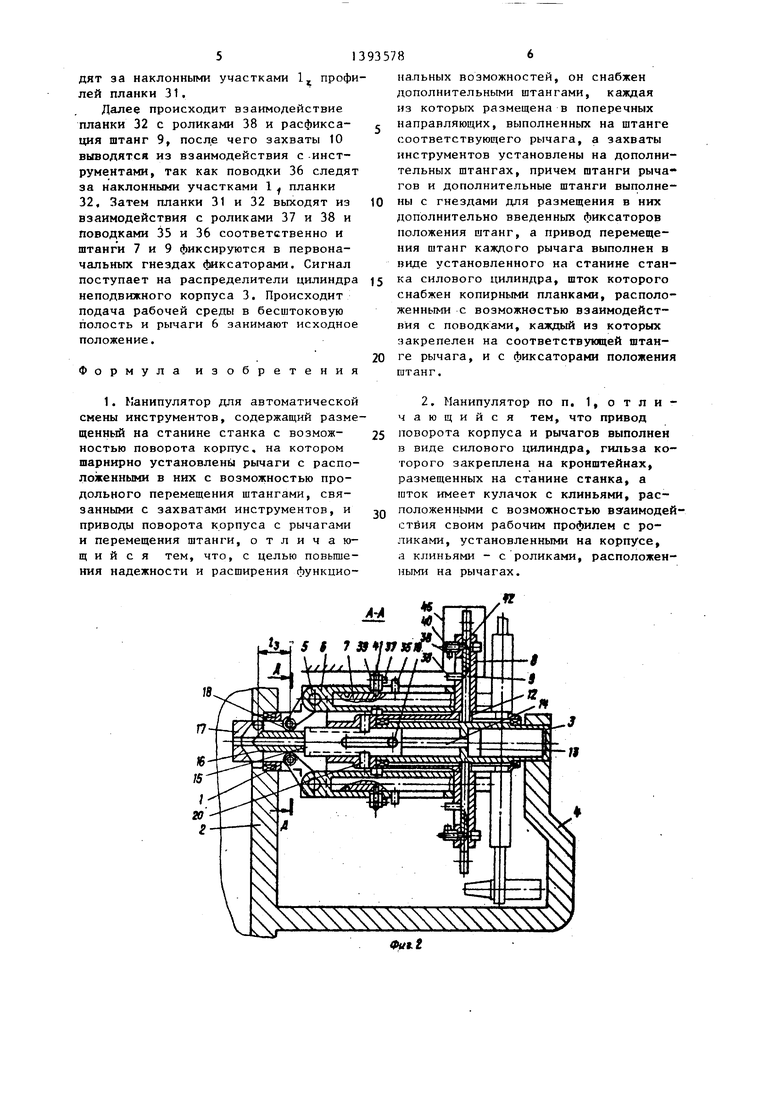
рых перемещаются штанги 7 с жестко закрепленными на них направляющими ,8,В направляющих 8 перемещаются штанги 9 захватов 10. Для перемещения штанг 7 и 9 служат силовые цилиндры, закрепленные на станине станка. Каждая пара штанг 7 и 9 имеет копиркые планки 31 и 32. С профилями планок
31 и 32 взаимодействуют поводки 35 36, закрепленные на штангах 7 и 9, и через ролики 37, 38 фиксаторы. Дпя сведения и разведения рычагов 6 служит поршень 13 со штоком 14, кулачок
15,имеющий возможность возвратно- поступательного перемещения, и клинья
16,17. 1 3.п. ф-лы. 11 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для автоматической смены инструмента | 1986 |
|
SU1404247A2 |
| Устройство для автоматической смены инструмента | 1986 |
|
SU1421483A1 |
| Устройство для автоматической смены инструментов | 1986 |
|
SU1449314A1 |
| Устройство автоматической смены инструмента | 1987 |
|
SU1425032A1 |
| Устройство для укладки штучныхиздЕлий B КОРОбКи | 1978 |
|
SU839865A1 |
| Револьверный суппорт токарного автомата | 1986 |
|
SU1342610A1 |
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Устройство для изготовления клиньев статоров электрических машин | 1986 |
|
SU1504744A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Устройство для непрерывной намотки нити | 1983 |
|
SU1137046A1 |

Изобретение относится к области станкостроения и может быть использовано в многооперационных станках типа обрабатывающий центр. Цель изобретения - повьппение надежности и расширение функциональных возможностей. Для этого станок включает два установленных в шарнирах поворотного корпуса 1 рычага 6, в кото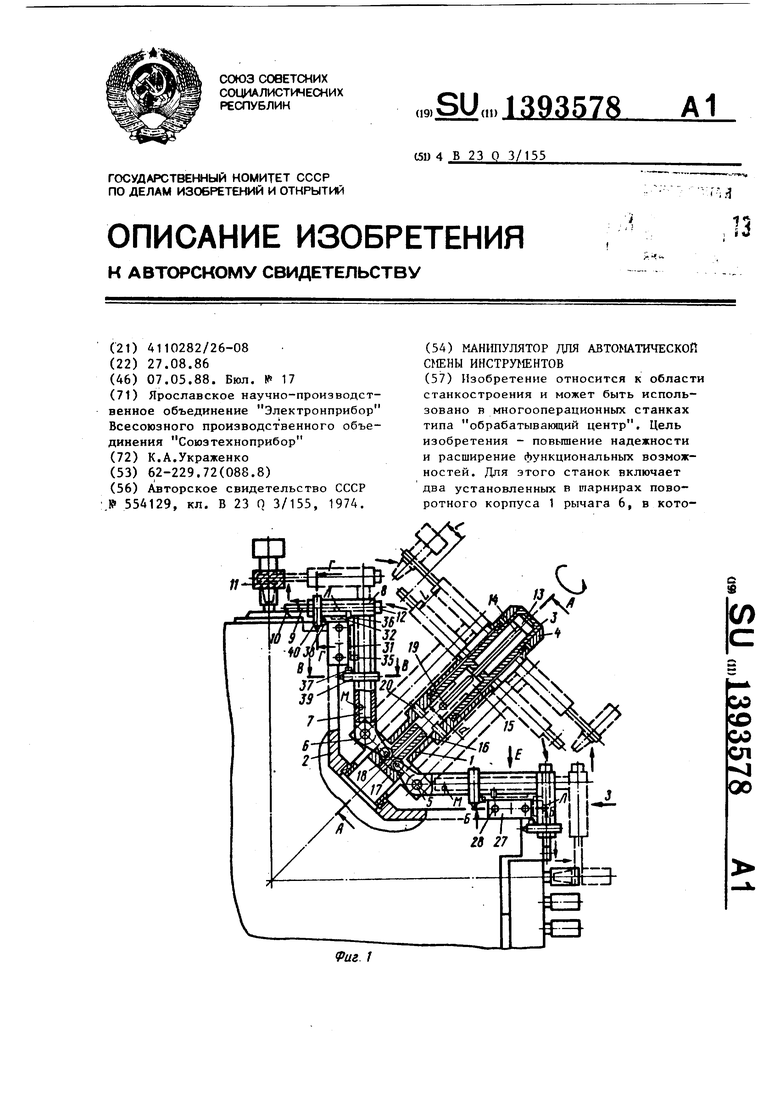
1
Изобретение относится к станкостроению, в частности к вспомогательным устройствам, применяемым в многооперационных станках типа обрабатывающего центра.
Цель изобретения - повьш1ение надежности и расширение функциональных возможностей за счет обеспечения фиксации частей манипулятора на станине станка относительно шпинделя и магазина инструментов.
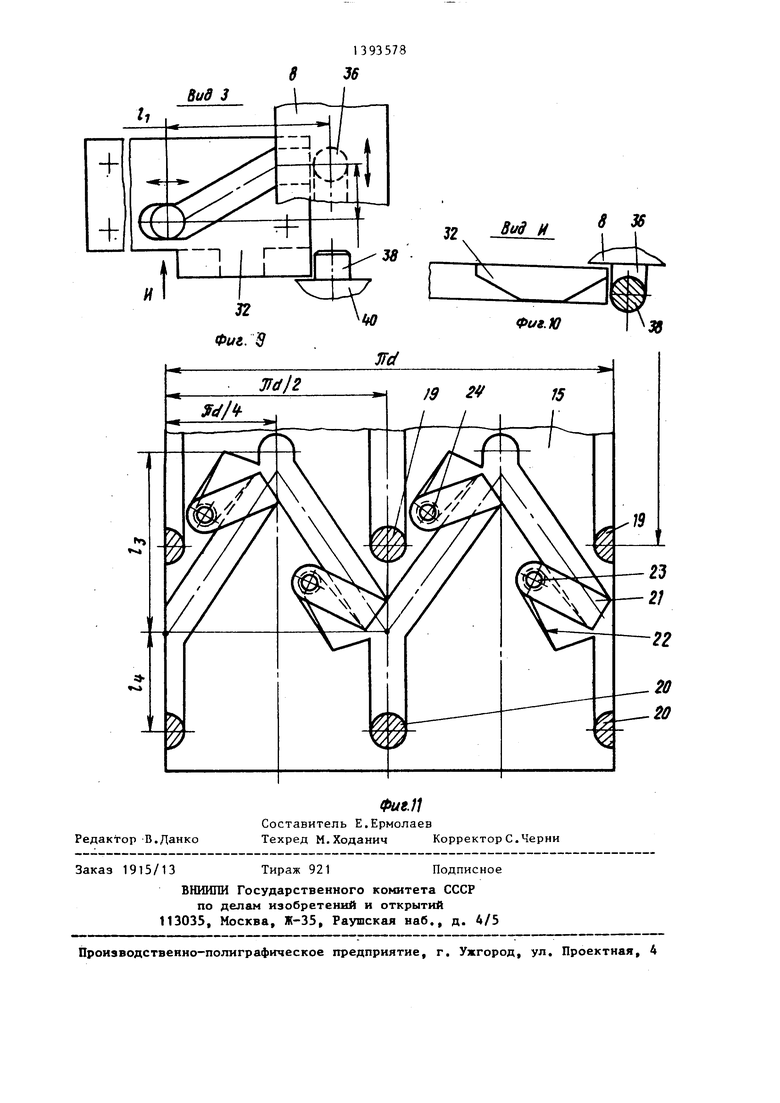
На фиг. 1 изображен манипулятор, вид сверху; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг.1, на фиг. 6 - разрез Д-Д на фиг. 2j на фиг. 7 - вид Е на фиг. 1; на фиг. 8 - вид К на фиг. 7,на фиг.9- вид 3 на фиг. 1; на фиг. 10 - вид И на фиг. 9J на фиг. 11 - развертка кулачка поворота корпуса в положении, соответствующем фиг. 1.
Манипулятор для смены инструмента металлорежущего станка включает поворотный корпус 1 механической руки, горизонтально установленный в опорах (подшипниках) станины 2, неподвижный корпус 3, закрепленный на кронштейне А и установленный соосно поворотному корпусу 1. В шарнирах 5 поворотного корпуса 1 руки установлены два рычага 6, в которых размещены с возможностью возвратно-поступательного перемещения штанги 7. На; концах штанг 7 жестко закреплены направляющие 8, В направляющих 8 пе- ремещаются дополнительные штанги 9 захватов 10 для удержания инструмента 11 при его смене.
Направляющие 8 имеют выступы 12 для фиксации рычагов 6 в пазах поворотного корпуса 1 руки при их сведении и ротации на 180. Поворотный корпус 1 руки имеет возможность дискретно с шагом 90 поворачиваться вокруг своей оси, а рычаг 6 - качаться (сводиться и разводиться на 45) относительно поворотного корпуса 1 вокруг шарниров 5. В неподвижном корпусе 3 установлен поршень 13 со штоком 14, а также кулачок 15, жестко связанный со штоком 14. На штоке 14 установлены также клинья 16 и 17. 16 установлен свободно с возможностью поворота вокруг оси, а
клин 17 - жестко. Клинья 16 и 17 поочередно взаимодействуют с роликами 18, установленными на коротких плечах рычагов 6. Кулачок 15 имеет возможность перемещаться только возвратно-поступательно, так как его вращательное движение ограничивается роликом 19, установленным на неподвижном корпусе 3 .и скользящим по пазу кулачка 15 на расстоянии 1 С профилем кулачка 15 взаимодействуют ролики 20, установленные в корпусе 1. Дпя надежного слежения роликов 20 за профилем кулачка 15 служат собачки 21, подпружиненные пружинами
жестко установленные на планках 26 станины 2. В планках 26 и 27 смонтированы направляккдне 28, по которым перемещаются ползуны 29 и 30. На ползунах 29 и 30 взаимно перпендикулярно закреплены напорные планки 31 и 32, содержание по два профиля. С ползуном 29 соединен шток 33 поршня
ЗА, который перемещается в цилиндре 25. С профилями планок 31 и 32 взаи- (модействуют поводки 35 и 36, жестко закрепленные на штангах 7 и 9, и ролики 37 и 38 держателей 39 и 40 соответственно. Держатели 39 и 40 содержат фиксаторы 41 и 42 и подпружинены пружинами 43 и 44 соответстве но. Поводки 35 штанг 7 служат и для ограничения штанг 7 от поворота вокруг своих осей и скользят по пазам рычагов 6, а поводки 36 - для ограничения от поворота штанг 9 и скользят по пазам направляющих 8. Враща- кщиеся части устройства закрыты кожухом 45,
Манипулятор работает следующим образом.
Рабочая среда подается в штоко- вую полость силового цилиндра, встроенного в неподвижном корпусе 3. При этом рычаги 6 из исходного вертикального положения (фиг. 2) устанавливаются в плоскость инструмента шпинделя и магазина, так как ролики 20 поворотного корпуса 1 следят за профилем кулачка 15, перемещающегося на расстояние 1. Ролики 18 в это время скользят вначале по прямолинейной плоскости клина 16 на участке Ij (фиг. 2), а затем вступают во взаимодействие с поверхност ями клина 17, в результате чего рычаги 6 поворачиваются вокруг шарниров 5 (каждый на 45).
При слежении роликами 20 за профилем кулачка 15 на участке Ij собачки 21 беспрепятственно откидываются, а затем под действием пружины 22 возвращаются в исходное положение . При разведении рычагов 6 срабатывают амортизаторы, и команда подается на распределители силовых цилиндров 25. Поршень 34 вместе с копирными планками 31 и 32 перемещается вниз и взаимодействует своими профилями вначале с роликами 37 и 38 держателей 39 и 40.Происходит расфиксация щтанг 7 и 9 от фиксаторов 41 и 4Z соответственно и одновременно фикса ция рычагов 6 и направляющих 8 другими сторонами этих фиксаторов относительно станины 2. При перемещении копирных планок 31 и 32 на расстоя
ние 1|. вначале происходит перемещение захватов 10 на расстояние 1 и автоматический захват ими инструментов 11. так как наклоиньй профиль
10
15
20
25
30
35
40
45
50
55
планки 32 взаимодействует с поводками 36 штанг 9 на участке 1. Во время захвата инструмента происходит также фиксация штанг 9 в гнездах Л фиксаторами 41, так как профиль кулачка 32 выходит из взаимодействия с роликом 38, и пружина 44 перемещает держатель 40 с фиксатором 42 к штанге 9. Слежение поводков 35 за профилями планки 31 в это время происходит на прямом участке, а после захвата инструмента поводки 35 следят за наклонным профилем Ij планки 31. Происходит выдвижение штанг 7 на расстоянии L, а следовательно, и инструментов из шпинделя и магазина. После чего происходит фиксация щтанг 7 фиксаторами 41, так как ролики 37 выходят из взаимодействия с профилями планок 31, а пружины 43 втягивают фиксаторы 41 в гнезда М. Когда поршень 34 опустится в нижнее положение, подается команда на распределитель цилиндра, смонтированного в неподвижном корпусе 3, и рабочая среда подается в бесштоковую полость.
Поршень 13 перемещается и клин 16 взаимодействует с роликами 18, а рычаги 6 сводятся к поворотному корпусу 1. Выступы 12 при этом заходят в пазы поворотного корпуса 1 для повышения жесткости. При перемещении кулачка 15 ролики 20 следят за его профилем вначале на прямом участке , а затем на наклонном Ij, поэтому поворотный корпус 1 поворачивается на 90. После чего подается команда на реверс и поршень 13 перемещается в обратную сторону, а ролики 20 следят в обратном направлении, но уже по другим наклонным профилям на участке Ij, так как собачки 21 не дают обратного перемещения. Происходит ротация еще на 90, а затем слежение по прямому участку. Ролики 18 в это время скользят вначале по прямолинейной поверхности клина 16, а затем взаимодействуют с клином 17. Рычаги 6 расходятся (на 45) в зону инструментов. Срабатывают амортизаторы и подается сигнал на пневмо- распределители цилиндров 25. Поршни ,34 поднимаются ввцрх. Происходит взаимодействие планки 31 с роликами 37 и расфиксация штанг 7. Затем замененные инструменты 11 устанавливаются одновременно в гнездах шпинделя и магазина, так как поводки 35 еле
--ЬОу ------- - - ,
9ut.t
Б-Б
99 37 М
В-В
ГГГ
2 1 33 6 7 Фиъ.
«J
IL±
ST
;4
Фиг. 5
fuf
But JK
«ui.e
Вид 3
36
| Авторское свидетельство СССР | |||
| Автооператор | 1974 |
|
SU554129A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
